Изобретение относится к автоматическому управлению и может быть использовано для управления электроприводами промьгащенных роботов, ме- таллорежущих станков и других промышленных механизмов, у которых в процессе работы контурный коэффициен усиления изменяется вследствие изменения приведенного момента инерции, динамического передаточного отношения редуктора, регулирования потока возбуждения двигателя и изменения момента нагрузки в функции скорости.
Известно, что при вьтолнении ряда технологических операций (шлифование строгание, резание и др.) момент нагрузки изменяется пропорционально припуску на обработку
М k,h V,(1)
:Где k - коэффициент пропорциональности;h - величина припуска; V - скорость подачи.
Аналогичньм образом изменяется момент нагрузки, действующий на звенья исполнительных меха&измов роботов и ряда других промышленных устройств при изменении вязкости рабочей среды (например, при переходе исполнительного механизма из газообразной части рабочего пространства в жидЛую)М,
kn.oii
Вт
(2)
,где k - коэффициент вязкого трения
рабочей среды;
6с - скорость движения исполни- тельного механизма.
В этом случае динамика исполнительного механизма с абсолютно жесткими звеньями описывается следующей.
системой дифференциальных уравнений Гм I Pci-+ kphi..
ci- UPoi,
(3)
где М- - движущий момент, прикла- CQ дьшаемый к рходном-у звену (момент двигателя);
I - приведенньш момент инерции
двигателя I I
+ I.
(4)
Z ft 06 - скорость выходного вала исполнительного механизма (ИМ);
5
5
0 0
5
Q
5
ci - угол поворота выходного вала ИМ;
U, X - кинематическое и динамическое передаточное отношение редуктора;
1дй момент инерции двигателя;
1 - момент инерции нагрузки;
.р - оператор дифференцирования.
dt
Согласно (3) передаточная функция ИМ по скорости имеет .вид
W(p) ,o(p)Mg(p) .(k,ht P+l.
(5)
Из (5) следует, что изменение припуска h приводит к пропорциональному изменению приведенного момента инерции двигателя и коэффициента передачи ИМ (k kjh) и, следовательно, к изменению контурного код-ффициента усиления системы (привода).
Цель изобретения - повьш1ение . ности и быстродействия.
На чертеже представлена функциональная схема самонастраивающейся системы управления.
Самонастраивающаяся система управления содержит блок 1 задающего сигнала, первый сумматор 2, регулятор 3, первый 4 и второй 5 блоки умноже-- ния, усилитель 6 мощности, электродвигатель 7, датчик 8 скорости, датчик 9 тока, исполнительный механизм 10, второй сумматор 11, первьм блок 12 деления, блок 13 вычисления динамического передаточного отношения, третий 14 и четвертый 15 сумматоры первьй интегратор 16, пятый сумматор 17, второй интегратор 18, задатчик 19 момента, датчик 20 усилия, блок 21 деления.
Самонастраивающаяся система управления работает следующим образом.
Блок 1 вырабатывает задающий сигнал, который в сумматоре 2 сравнивается с сигналом отрицательной обратной связи по скорости, формирующимся с помощью датчика 8 скорости, В сумматоре 2 вырабатывается сигнал ошибки, который через регулятор 3, блоки умножения 4 и 5 и усилитель 6 мощности передается на электродвигатель 7, развивающий скорость вращения, соответствующую, задающему сигналу. Регулятор 3 настраивается таким образом, что при номинальном приведенном моменте инерции двигателя, номинальном потоке возбуж3 1462242
дения, номинальном припуске на об- При изменении момента нагрузки работку и тяговом режиме работы сило- (увеличении) скорость двигателя уме- вого редуктора исполнительного ме- ньшается, а ток - возрастает.При этом ханизма динамические свойства систе- появляется рассогласование между ди- мы (быстродействие и динамические намическим током двигателя и сигналом ошибки но управлению и возмущению) на выходе сумматора 11 (на входе бло- удовлетворяют техническим требова- ка 12 деления), поскольку величина ниям и считаются оптимальными. сигнала на выходе интегратора 18 со- Предположим, что момент нагрузки ш ответствует прежнему (меньшему) зна- на выходном валу постоянен, а коэф- чению момента нагрузки. В этом слу- фидиент передачи двигателя уменьша- чае сигнал на выходе сумматора 15, а ется вследствие ув еличения момента следовательно, и интегратора 16 на- инерции нагрузки. Будем считать, чинает увеличиваться. Так как выход- что силово редуктор работает в тяго- 15 ной сигнал датчика 8 скорости умень- вом режиме. В этом случае во .время шается, то под действием появившегося переходного процесса, напр.имер, по на выходе сумматора отрицательного управлению (сигнал задания увеличива- рассогласования выходной сигнал ин- ется) выходной сигнал датчика 9 тока, тегратора 18 (его знак отрицателен) проходя через блоки 11, 12, 16, 20 начинает увеличиваться по абсолютной вызывает изменение сигнала на выходе величине до тех пор, пока не придет интегратора 16, который вычитается в соответствие с увеличившимся мо- в сумматоре 17 из сигнала датчика ментом нагрузки.
8 скорости. Разностный сигнал с вьг- При одновременном, изменении MOMeji- хода сумматора 17 поступает на второй 25 та нагрузки и момента инерции вход сумматора 15, где складывается согласованная работа и правиль- с сигналом, посту ющим с блока 12 «« взаимодействие контуров оцен- деления. В результате сигнал на выхо- «« (&локи 11-14,. де сумматора 15 уменьшается. Вслед- 15-17 и 19) и тока нагрузки (блоки ствие этого увеличивается выходной 30 |11, 12, ) обеспечиваются соот- сигнал блока 12 деления, пропорцио- . ветствующим выбором их контурных коэф- нальный частному от деления выходно- фициентов усиления.
го сигнала сумматора 11 на выходной В статическом равновесном состоя- сигнап сумматора 15. Так будет про- нии (Ы О, М М„) силовой необ- исходить до тех пор, пока сигнал 35 ратимый редуктор исполнительного мена выходе сумматора 15 не станет рав- ханизма заклинивается. Это позволяет ным ускорению вькодного вала федук- отключать исполнительный электричес- тора, а сигнал на выходе блока.де- кий двигатель от источника энергии ления 12 - моменту инерции нагрузки. в статических равновесных состояниях Далее этот сигнал через блок 13 по- 40 и за счет этого существенно повысить ступает на вход третьего сумматора энергетические характеристики системы 14, на второй вход которого подает- в целом.
ся сигнал, пропорциональный моменту При изменении динамического переинерции двигателя с выхода задатчи даточного отношения редуктора вслед- ка 19. На выходе сумматора 14 фор- 45 ствие смены режима его движения, что мируется сигнал, пропорциональньй чаще всего происходит при реверсе, суммарному моменту инерции, приведен-, торможении или разгоне электрического ному к валу двигателя. Этот сигнал двигателя, изменяется знак одной из в блоке 4 .умножается на сигнал, по- переменных системы: скорости (oi) или ступающий с выхода регулятора 3, В 50 тока (Ij) двигателя. При этом в блоке .результате получаем эффект увеличения 13 изменяется знак сигнала, пропор- общего коэффициента передачи регу- ционального произведению- момента лятора 3 и блока 4 на величину, про- и скорости двигателя, формируемого порциональную уменьшению коэффициента по сигналам, поступающим на первьй и передачи двигателя, и стабшгазатши 55 второй управляющие входы блока с вьг- контурного коэффициента передачи всей ходов датчиков тока 9 и скорости 8. системы в целом.В результате в блп ке 13 в функции
Аналогичный процесс происходит при знака вновь сформированного сигнала уменьшении задающего.сигнала. устанавливается коэффициент передачи
по информационному входу, пропорциональный динамическому передаточному отношению силового редуктора системы в соответствующем режим е движения, что позволяет учесть нелинейные свойства редуктора при оценке суммарного приведенного момента инерции, а следовательно, повысить точность работы устройства идентификации и всей сис- гемы в целом.
i , Как видно из (5), изменение вели- чины припуска эквивалентно изменению коэффициента усиления и момента инер- |ции исполнительного механизма. Вли- |яние переменного момента инерции на динамику системы компенсируется описанным выше контуром самонастройки ;С наблюдателем момента инерции наг- ipysKH. Влияние изменения припуска на (Коэффициент усиления исполнительного механизма устраняется следующим об- ;разом.
- Рассмотрим случай, когда припуск на обработку h, например, увеличи- |вается. В этом случае сигнал на вы- |ходе датчика 20 усилия также увели- чивается, а сигнал на выходе датчи- ка 8 скорости вследствие наличия люфтов, упругих деформаций некоторое время остается неизменным. В результате увеличивается сигнал на выходе блока 21 деления в соответствии с из- менивптимися сигналами на его входах, поступающими с выходов датчика скорости 8 и усилия 20. Выходной сигнал блока 21 деления умножается в блоке 5 на выходной сигнал блока 4 умножения. В результате будет наблюдаться эффект увеличения общего коэффициен- Та усиления регулятора 3, блока 4 и 5 умножения на величину, пропорциональную изменению усилия резания, и в соответствии с (1) стабилизации контурного коэффициента передачи всей системы в целом в условиях изменения припуска на обработку детали.
Аналогичный процесс происходит лри уменьшении припуска h.
Таким образом 5 применение изобретем ния позволяет заесть влияние на веп пичину общего коэффициента усиления системы изменения П15ипуска на обра14622426
ность и быстродействие работы системы в целом, с Формул а изобретени
Самонастраивающаяся система управления, содержащая последователб но соединенные блок задающего сиг- 10 нала, первый сумматор, регулятор,
первый блок умножения, последовате но соединенные усилитель мощности электродвигатель, подключенный вых дом к входу исполнительного механи
15 ма, а также через датчик скорости второму входу первого сумматора и первому управляющему входу блока в числения динамического передаточно отношения и через датчик тока к вх
20 второго сумматора и второму управл ющему входу блока вычисления динамического передаточного отношения, выход которого соединен с входом т тьего с умматора,. подключенного вт
25 рым входом к выходу задатчика моме та, а выходом - к второму входу пе вого блока умножения, выход второг сумматора соединен с входом делимо первого блока деления, подключенно
30 выходом к информационному входу-.бл ка вычисления динамического переда точного отноиения и через последов тельно соединенные четвертый с умма тор, первый интегратор, пятый с умм
35 тор, второй интегратор - к второму входу второго сумматора, выход пер вого интегратора соединен с входом делителя первого блока деления вт рой вход и выход пятого сумматора
40 подключены соответственно к выходу датчика скорости и к второму входу четвертого сумматора, отлича ющаяся тем, что, с целью повышения точности и быстродействия
45 системы, введены датчик усилия, вт рой блок деления и второй блок умножения, соединенный входом с выхо первого блока умножения, а выходом с входом усилителя мощности, выход
50 исполнительного механизма через да чик усилия подключен к входу делим второго блока деления, соединенног входом делителя с выходом датчика скорости, а выходом - с вторым вх
стемы в целом, Формул а изобретения
Самонастраивающаяся система управления, содержащая последователб- но соединенные блок задающего сиг- нала, первый сумматор, регулятор,
первый блок умножения, последовательно соединенные усилитель мощности и электродвигатель, подключенный выходом к входу исполнительного механизма, а также через датчик скорости к второму входу первого сумматора и первому управляющему входу блока вычисления динамического передаточного отношения и через датчик тока к входу
второго сумматора и второму управляющему входу блока вычисления динамического передаточного отношения, выход которого соединен с входом третьего с умматора,. подключенного вторым входом к выходу задатчика момента, а выходом - к второму входу первого блока умножения, выход второго сумматора соединен с входом делимого первого блока деления, подключенного
выходом к информационному входу-.блока вычисления динамического передаточного отноиения и через последовательно соединенные четвертый с умма- тор, первый интегратор, пятый с умматор, второй интегратор - к второму входу второго сумматора, выход первого интегратора соединен с входом делителя первого блока деления второй вход и выход пятого сумматора
подключены соответственно к выходу датчика скорости и к второму входу четвертого сумматора, отличающаяся тем, что, с целью повышения точности и быстродействия
системы, введены датчик усилия, второй блок деления и второй блок умножения, соединенный входом с выходом первого блока умножения, а выходом - с входом усилителя мощности, выход
исполнительного механизма через датчик усилия подключен к входу делимого второго блока деления, соединенного входом делителя с выходом датчика скорости, а выходом - с вторым входом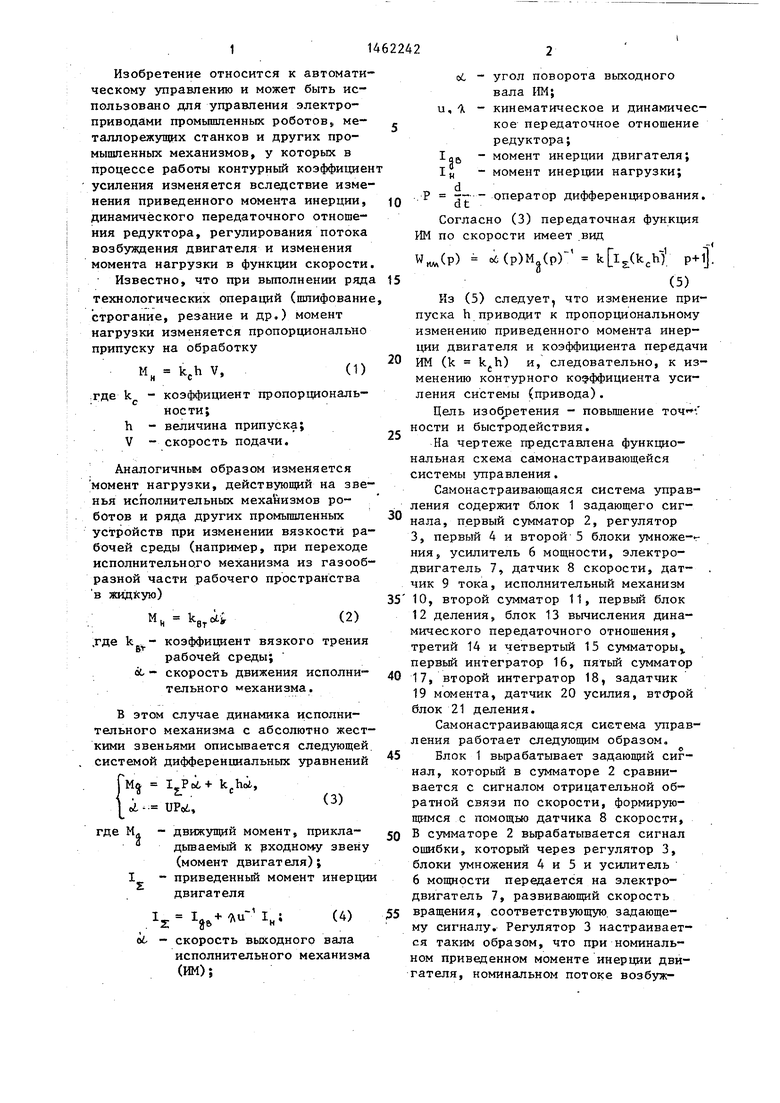

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
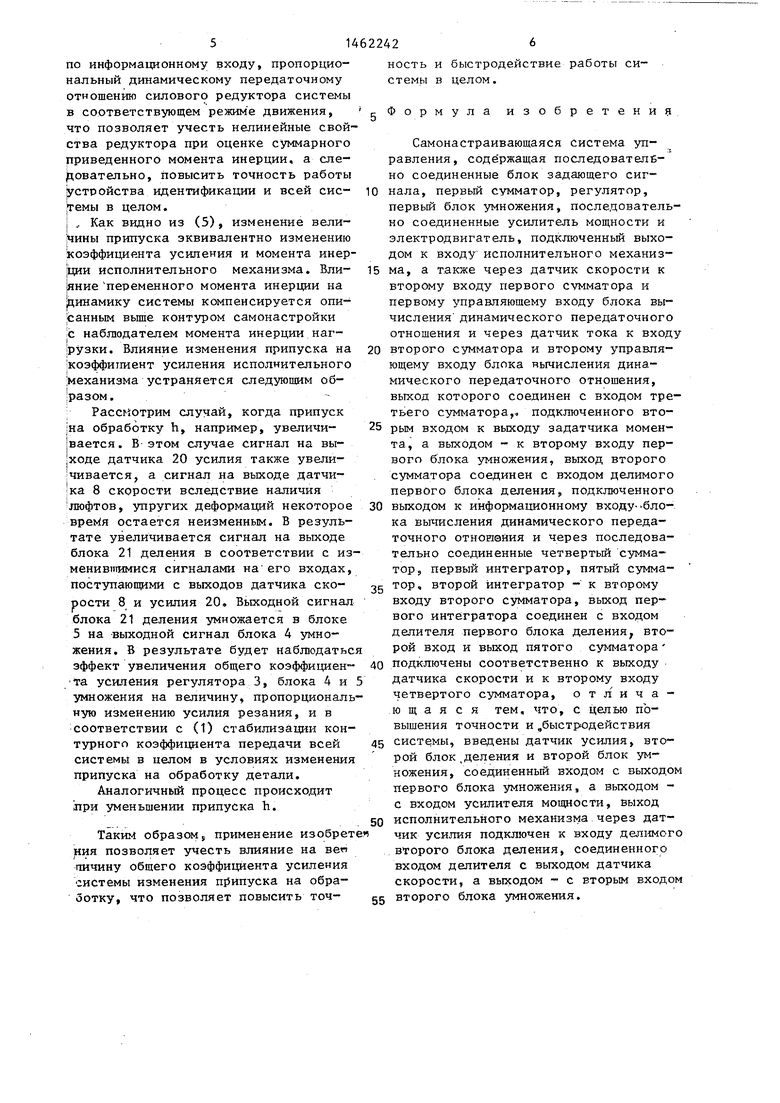
Изобретение относится к автоматическому управлению и может быть использовано для управления электроприводами промьпЕленных роботов, ме- таллбрёжупщх станков и других про- мьшшенных механизмов, у которых в процессе работы контурный коэффициент: усиления изменяется вследствие изменения приведенного момента инерции динамического передаточного отношения редуктора, регулирования потока возбуждения и изменения момента нагрузки в функции скорости. Цель изобретения повышение точности и быстродействия. Самонастраивающаяся система управления содержит блок 1 задающего сигнала, первый сумматор 2, регулятор 3, первый 4 и второй 5 блоки умножения, усилитель 6 мощности, электродвигатель 7, датчик 8 скорости, датчик 9 тока, исполнительный механизм 10, второй сумматор 11, первьй блок 12 деления, блок 13 вьиисления дина- мического передаточного отношения, третий 14 и четвертый 15 сумматоры, первый интегратор 16, пятый сумматор IjJ, второй интегратор 18, задатчик /19 MOMeHTaj датчик 20 усилия и второй блок 21 деления. Цель изобретения достигается за счет введения блоков 5 и 21 и датчика 20. 1 ил, е (Л | 05 tsO to ji 
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
