ой вход извне подается сигнал, проорциональный постоянному моменту соротивления (нагрузки), блока умножеия, третьего сумматора, интегратора, етвертого сумматора, второго блока множения и второго интегратора,выод которого является выходом устройTBa идентификации и подключен ко торому входу блока деления. Выход торого интегратора подается также на второй вход первого блока умножения, выход второго сумматора соединен со вторым входом второго блока умножения, выход датчика скорости подключен ко второму входу первого сумматора и ко второму входу четвертого сумматвра, выход которого соединен со вторым входом третьего сумматора 2.
Эта Сс1монастраивающаяся система оказывается неработоспособной при переменном моменте нагрузки, так как она принципиально рассчитана лишь на работу электропривода с постоянным моментом нагрузки, когда на устройство идентификации подается извне постоянный сигнал, учитывающий наличие постоянного тока нагрузки. Кроме того, система оказывается неработоспособной при регулировании потока возбуждения двигателя, так как при этом ток нагрузки будет изменяться даже при постоянном нагрузочном моменте.
Цель изобретения - расширение области применения самонастраивающейся системы управления путем обеспечения работоспособности системы в условиях, когда момент нагрузки является переменным, а также когда.регулируется поток возбуждения.
Указанная цель достигается тем, что в известную самонастраивающуюся систему управления, содержащую последовательно соединенные блок задающего сигнала, первый сумматор, регуля,тор, блок деления, усилитель мбщности и электродвигатель, соединенный со входами датчика скорости и датчика тока, причем выход датчика тока через последовательно соединенные вторюй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второй блок умножения и второй интегратор подключен ко второму входу блока деления, выход датчика скорости соединен со вторым входом первого сумматора и со вторым входом четвертого сумматора, выход которого соединен со вторым входом третьего сумматора, выход второго сумматора соединен со вторым входом второго блока умножения, а выход второго интегратора соединен со вторым входом первого блока умножения, дополнительно введен третий интегратор, вход которого соединен с выходом четвертого сумматора, а выход - со вторым входом второго сумматора.
Сущность предлагаемого изобретения заключается в том, что вновь введенный блок обеспечивает автоматическую оценку тока нагрузки двигателя, благодаря чему устройство идентификации , а с ним и вся самонастраивающаяся система управления в целом становится работоспособной не только при постоянном, но и при переменном моменте нагрузки, а также регулировании потока возбуждения двигателя, чем и достигается цель изобретения.
В самом деле, поскольку устройство идентификации по существу представляет собой настраиваемую модель двигателя, для его нормального функционирования необходимо подавать на его вход ту же величину, что и реально действующая на двигатель, т.е. динамический ток. Формирование сигнала, пропорционального динамическому току двигателя, как раз и осуществляется совместно датчиком тока и вновь введенным третьим интегратором.
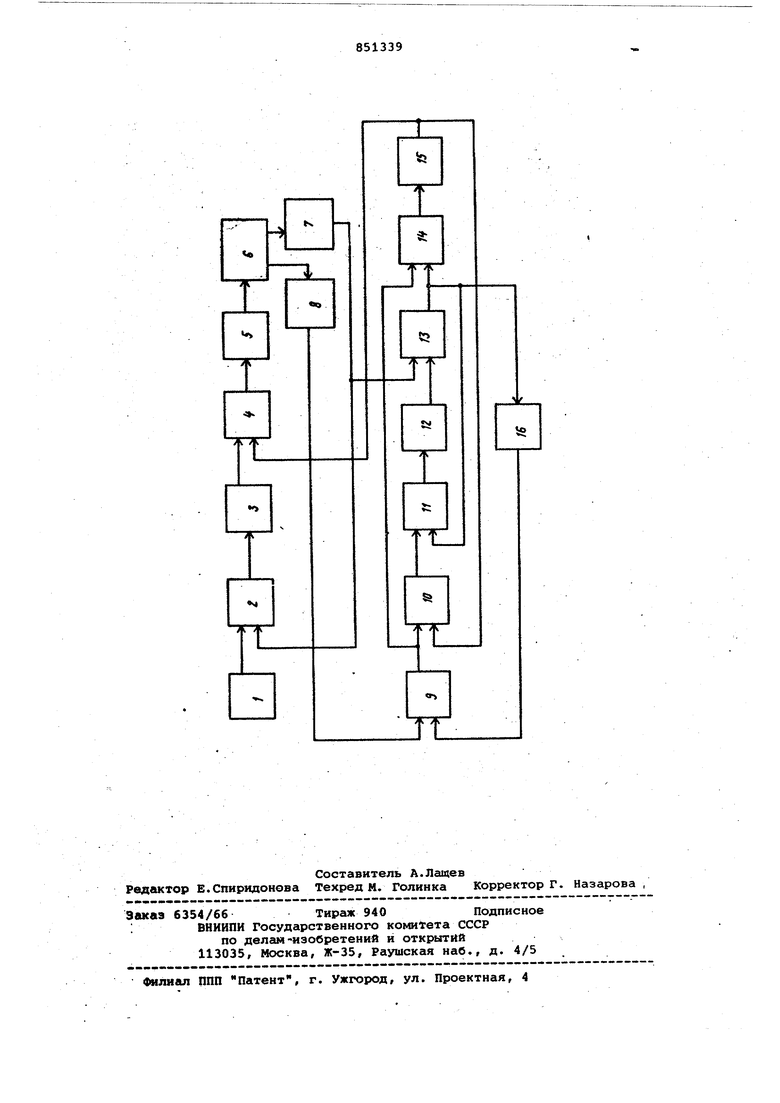
На чертеже изображена функциональная схема предлагаемой самонастраивающейся системы управления.
В соответствии с функциональной схемой предлагаемая самонастраивающаяся система управления содержит последовательно соединенные блок 1 задающего сигнала, сумматор 2, регулятор 3, блок 4 давления, усилитель 5 мощности и электродвигатель 6, к которому подключены датчик 7 скорости и датчик 8 тока. Выход датчика тока через последовательно соединенные сумматор 9, блок 10 умножения, сумматор 11, интегратор 12, сумматор 13, блок 14 умножения и интегратор 15 подключен ко второму входу блока 4 деления. Выход датчика 7 скорости соединен со вторыми входами сумматоров 2 и 13. Выход сумматора 13 соединен со вторым входом сумматора 11, а также через интегратор 16 - со вторым входом сумматора 9, выход которого подключен ко второму входу блока 14 умножения. Второй вход блока 10 , умножения соединен с выходом интегратора 15.
Предлагаемая самонастраивающаяся система управления, например электродвигатель с переменным моментом инерции и регулируемым потоком возбуждения, работает следующим образом.
Блок 1 зсщающего сигнала вырабатывает задающий сигнал, который через сумматор 2, регулятор 3, блок 4 деления и усилитель 5 мощности передается на электродвигатель 6, развивающий скорость вращения, соответствующую задающему сигналу. Указанное соответствие обеспечивается совместным действием регулятора 3 и отрицательной обратной связи с выхода датчика 7 скорости на вход сумматора .2. Настроечные парамет{« регулятора выбраны таким образом, что при номииальом приведенном моменте инерции двиателя и номинальном потоке возбуждеия динамические свойства системы (быстродействие и динамические ошиби по управлению и возмущению) удоветворяют техническим требованиям и читаются оптимальными.
Предположим, что момент нагрузки вигателя постоянен, а коэффициент передачи уменьшился, например,вследствие увеличения приведенного момента инерции. В этом случае во время переходного процесса, например, по управлению (задающий сигнал.увеличился) выходной сигнал датчика 8 тока, проходя через блоки 9, 10, 11 и 12, вызовет изменение выходного сигнала интегратора 12, который вычитается в сумматоре 13 из сигнала датчика скорости, и на выходе сумматора 13 появится отрицательный сигнал ошибки. Будучи умножен в блоке 14 на положительный выходной сигнал сумматора 9, он вызывает уменьшение выходного сигнала интегратора 15 вследствие чего коэффициент передачи блока 10 умножения по первому входу уменьшается до .тех пор, пока ошибка на выходе сумматора 13 не станет равной нулю, а коэффициент передачи по первому входу блока 10 умножения (т.е. выход интегратора 15) не станет равным коэффициенту передачи двигателя. Аналогичный процесс будет происходить, если задакядий сигнал уменьшится.
При изменении момента нагрузки, например при его увеличении, скорость двигателя начнет уменьшаться, а ток возрастать. Поскольку величина сигнала на выходе интегратора 16 соответствует прежнему (меньшему) значению момента нагрузки, то на первый вход блока 10 умножения поступает сигнал. Уже не соответствующий динамическому току, воздействующему на двигатель. Выходной сигнал интегратора 12 увеличивается (так -как ток возрастает),в то время как выход датчика 7 скорости уменьшается. Под действием появившегося на выходе сумматора 13 отрицательного сигнала рассогласования выходной сигнал интегратора 16 (его знак отрицателен) начнет увеличиваться до тех пор, пока не придет в соответствие с увеличившимся моментом нагрузки двигателя.
При одновременном изменении коэффициента передачи и. момента нагрузки вигателя (этому случаю соответствует также режим регулирования потока при постоянном моменте нагрузки,так как при этом меняется и коэффициент
передачи, и ток нагрузки) работа сие темы происходит подобно тому, как описано выше При этом согласованная работа и правильное взаимодействие контура оценки коэффициента передачи, образованного блоками контура оценки тока нагрузки, включающего блоки 9, 10, 11, 12, 13 и 16, Обеспечивается соответствукяцим выбором их контурных коэффициентов усиления. Таким образом, предлагаемая система при введении интегратора 16 меж
0 ду выходом сумматора 13 и вторым Bxdдом сумматора 9 обеспечивает идентификацию коэффициента Передачи двигателя при изменении момента нагрузки и- благодаря этому осуществляет авто5матическую стабилизацию контурного коэффициента усиления.
Формула изобретения
0
Самонастраивающаяся система управления, содержащая последовательно соединенные блок задающего сигнала, первый сумматор, регулятор, блок де5ления, усилитель мощности и э ектродвигатель, соединенный со входами датчика скорости и датчика тока,причем выход датчика тока через последовательно соединенные второй сумматор,
0 первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второй блок умножения и второй интегратор подключен ко второму входу блока деления, выход датчи5ка скорости соединен со вторым входом первого сумматора и со вторым входом четвертого сумматора, выход которого соединен со вторым входом третьего сумматора, выход второго с сумматора соединен со вторым входом
0 второго блока умножения, а выход второго интегратора соединен ро вторым входом первого блока умножения, о тличЬющаяся тем, что, с целью расширения области применения
5 путем обеспечения работоспособности системы при переменном моменте нагрузки, в -«ее введен третий интегратор, вход которого соединен с выходом четвертого сумматора, а выход 0со вторым входом второго сумматора.
Источники информации, принятые во внимание при экспертизе
1.Кузовков Н.7 МоДгшьное управление и наблюдающие устройства.М.,
5 Мгшшностроение, 1976, рис. 6-6.
2.Журнал Электротехническая промышленность, сер. Электропривод, 1977, 8(1), с. 23-25 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |