(54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ


| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1277065A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |

1
Изобретение относится к области систем регулирования скорости и может быть использовано для управления промышленными электроприводами, в которых в процессе работы имеет место изменение электромеханической постоянной времени, в том числе за счет регулирования потока возбуждения двигателя и изменения приведенного момента инерции, и может найти применение, например, в роботостроении (в системах управления приводами рабочих органов манипуляционных роботов), в станкостроении ( в системах управления приводами главного движения металлорежущих станков), в металлургии (в системах управления приводами моталок непрерывных прокатных станов).
Известна самонастраивающаяся система управления, содержащая последовательно соединенные настраиваемый регулятор и объект, выхо которого соединен со входом регулятора, а также устройство идентификации переменных параметров объекта, входы которого соединены соответственно со входами и выходами объекта, а выходы - с управляемыми входами регулятора 1 и 2.
Однако известная самонастраивающаяся система обеспечивает стабилизацию динамических свойств при управлении электродвигателем с переменным моментом инерции и регулируемым потоком возбуждения только при отсутствии момента нагрузки двигателя, поскольку используемое в ней устройство идентификации рассчитано только на объекты с одним входом. Это ограничивает область применения системы.
Известна также самонастраивающаяся система регулирования скорости, содержащая последовательно соединенные задатчик, сумматор, регулятор, исполнительный электродвигатель, датчик скорости, модель электродвигателя, блок управления моделью и 15 контур самонастройки 3.
Однако известная система, обеспечивая автоматическую стабилизацию контурного коэффициента усиления при изменении потока возбуждения двигателя, не учитывает влияния на контурный коэффициент усиления изменения момента инерции двигателя, что значительно уменьшает точность ее работы и, следовательно, ограничивает область применения. Из известных систем наиболее близкой по технической сущности к изобретению является самонастривающаяся система управления, содержащая последовательно соединенные задатчик, первый сумматор, регулятор, усилитель мощности и электродвигатель с установленными на нем датчиком регулируемой координаты и датчико тока, выход которого через последовательно соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второй блок умножения и второй интегратор подключен к управляющему входу регулятора и к второму входу первого блока умножения, первый вход которого подключен ко второму входу второго блока умножения, выход датчика регулируемой координаты соединен со вторым входом первого сумматора и вторым входом четвертого сумматора, выход которого соединен со вторым входом третьего сумматора 41. Недостатком системы является низкая точность работы при переменном моменте нагрузки. Целью изобретения является повышение точности работы системы. Поставленная цель достигается тем, что в предложенной системе установлены последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которого соединен с выходом второго интегратора, а выход - со вторым входом второго сум ма7ора7 выхо7 блока умножения подключен ко входу третьего интегратора, выход датчика peгVлиpyeмой координаты подключен ко второму входу пятого сумматора 1)ункциональная схема предлагаемой самонастривающейся системы управления изображена на фиг. 1; осциллограммы процессов адаптивной идентификации приведены на фиг. 2, осциллограммы переходных процессов регулирования скорости в самонастраивающейся системе управления приведены на фиг. 3. На фиг. 1 обозначены задатчик 1, первый сумматор 2, неизменяемая часть регулятора 3, изменяемая часть регулятора 4, усилитель мощности 5, электродвигатель 6, датчик регулируемой координаты 7, датчик тока 8, второй сумматор 9, первый блок умножения 10, третий сумматор 11, первый интегратор 12, четвертый сумматор 13, второй блок умножения 14, второй интегратор 15, третий интегратор 16, пятый сумматор 17, блок деления 18, устройство идентификации 19, регулятор 20, первые и вторые модели 21, 22 двигателя. Основной контур регулирования (скорости двигателя) образован задатчиком 1, первым сумматором 2, регулятором 20, усилителем мощности 5 и двигателем 6 с датчиком регулируемой координаты 7, например датчиком скорости. Остальные блоки образуют устройство идентификации коэффициента передачи ток-скорость двигателя. Оценка этого коэффициента получается на выходе второго интегратора 15 и подается на управляющий вход регулятора, что обеспечивает автоматическую стабилизацию контурного коэффициента усиления системы при изменении коэффициента передачи двигателя, обусловленном изменением момента инерции и/или регулированием потока возбуждения. Регулятор 20 состоит из неизменяемой части 3 и изменяемой части 4. В качестве неизменяемой части 3 могут быть применен.ы любые линейные или нелинейные элементы автоматики, в качестве изменяемой части 4 -блок деления, блоки умножения и множительно-делительные блоки, В устройстве идентификации последовательно соединённь1е через сумматор 11, блок умножения 10 и интегратор 12 представляют „„, собой настраиваемую модель двигателя 21, на вход которой должна быть подана также самая величина, что и реально действующая на входе двигателя. В этом случае получаемый на выходе сумматора 13 сигнал ощибки может быть использовано для настройки коэффициента передачи модели, так как эта ощибка обусловлена только различием коэффициентов передачи двигателя 6 и модели 21. На вход модели 21, т. е. на второй 9, должен поступать не только сигнал, пропорциональный току двигателя, снимае ш с датчика тока 8, но и сигнал, пропорциональный току нагрузки, т. е. пропорциональныи отношению момента нагрузки к отоку возбуждения. Формирование требуе сигнала, пропорционального току нагрузки, производится цепью из вновь ввеДанных блоков, обеспечивающих косвенную оценку изменяющегося тока нагрузки следующим образом. Первый блок умножения 10 и третий интегратор 16 составляют вторую модель дггигателя 22. На выходе сумматора 17 вырабатывается сигнал рассогласования между действительной скоростью двигателя 6 и выходом модели 22. При равенстве коэффициентов передачи модели 22 и двигателя 6 этот сигнал рассогласования имеет место, если на систему действует момент нагрузки. Это рассогласование усиливается в блоке деления 18 и подается на сумматор 9. Блок деления 18 использован с целью стабилизации динамических свойств контура, образованного сумматором 9, блоком умножения 10 и цепью из вн(Увь введенных блоков. Без блока деления 18 не может быть обеспечена удовлетворительная настройка идентификатора 19. Действительно, в этом случае коэффициент усиления этого контура не зависит от выходного сигнала интегратора 15, так как этот сигнал подается как на блок умножения 10, так и на блок деления 18.
Предлагаемая самонастраивающаяся система управления, например, электродвигателем с переменным моментом инерции и регулируемым потоком возбуждения работает следующим образом.
Задатчик 1 вырабатывает задающий сигнал, который через сумматор 2, регулятор 20, и усилитель мощности 5 передается на двигатель 6, развивающий скорость вращения, соответствующую задающему сигналу. Указанное соответствие обеспечивается совместным действием регулятора 20 и главной отрицательной обратной связи с выхода датчика скорости регулируемой координаты на вход сумматора 2. Настроечные параметры регулятора 20 выбраны таким образом, что при номинальном приведенном моменте инерции двигателя 6 и номинальном потоке возбуждения динамические свойства системы (быстродействие и динамические ошибки по управле.чию и возмущению) удовлетворяют техническим требованиям и считаются оптимальными.
Предположим, что момент нагрузки двигателя 6 постоянен, а коэффициент передачи уменьшился, например, вследствие увеличения приведенного момента инерции.В этом случае во время переходного процесса, например, по управлению (задающий сигнал увеличился) выходной сигнал датчика тока 8 проходя через сумматор 9, блок умножения 10, сумматор 11 и интегратор 12 вызовет изменение сигнала интегратора 12, который вычитается в сумматоре 13 из сигнала датчика регулируемой координаты 7, и на выходе сумматора 13 появится отрицательный сигнал ошибки. После умножения в блоке умножения 14 на положительный выходной сигнал сумматора 9 он вызовет уменьшение выходного сигнала интегратора 15, вследствие чего коэффициент передачи по первому входу блока умножения 10 уменьшается до тех пор, пока ошибка на выходе сумматора 13 не станет равной нулю, а коэффициент передачи по первому входу блока умножения 10 (т. е. выходу интегратора 15) не станет равным коэффициенту передачи двигателя. Аналогичный процесс происходит если задающий сигнал уменьщился. Выходная величина устройства идентификации (выход интегратора 15) подается на изменяемую часть 4 регулятора 20, обеспечивая стабилизации контурного коэффициента усиления, а c leдoвaтeльнo, и динамических свойств системы.
При изменении момента нагрузки, например увеличении, скорость двигателя 6 уменьшится, а ток увеличится. Поскольку величина сигнала на выходе блока деления 18 соответствует прежнему (меньшему) значению момента нагрузки, то на первый вход блока умножения 10 поступает сигнал, уже не соответствующий динамическому току, воздействующему на двигатель. Выходной сигнал интегратора 16 увеличивается
(так как ток возрос), в то время как выходной сигнал датчика регулируемой координаты уменьщается. Имевщее место рассогласование на выходе сумматора 17 начнет увеличиваться, что приведет к увеличению
сигнала с выхода блока деления 18 до тех пор, пока за счет действия обратной связи через сумматор 9, блок умножения 10, интегратор 16 и блок деления 17 этот сигнал не придет в соответствие с увеличившимся моментом нагрузки двигателя.
При одновременном изменении коэффициента передачи и момента нагрузки двигателя 8 (этому случаю соответствует также режим регулирования потока при постоянном моменте нагрузки, так как при этом
5 меняются и коэффициент передачи, и ток нагрузки) система работает аналогично. При этом согласованная работа и правильное взаимодействие контура оценки коэффициента передачи, образованного сумматором 9, блоком умножения 10, сумматором 11, интегратором 12, сумматором 13„ блоком умножения 14 и интегратором 15, И контура оценки тока нагрузки, включающего сумматор 9, блок умножения 10, интегратор 16, сумматор 17 и делитель 18, обеспечивается соответствующим выбором их контурных коэффициентов усиления.
Таким образом, предлагаемая система при введении интегратора 16, сумматора 17 и блока деления 18 и соответствующих новых связей обеспечивает идентификацию коэффициента передачи двигателя 6 при изменении момента нагрузки и благодаря этому осуществляет автоматическую стабилизацию контурного коэффициента усиления.
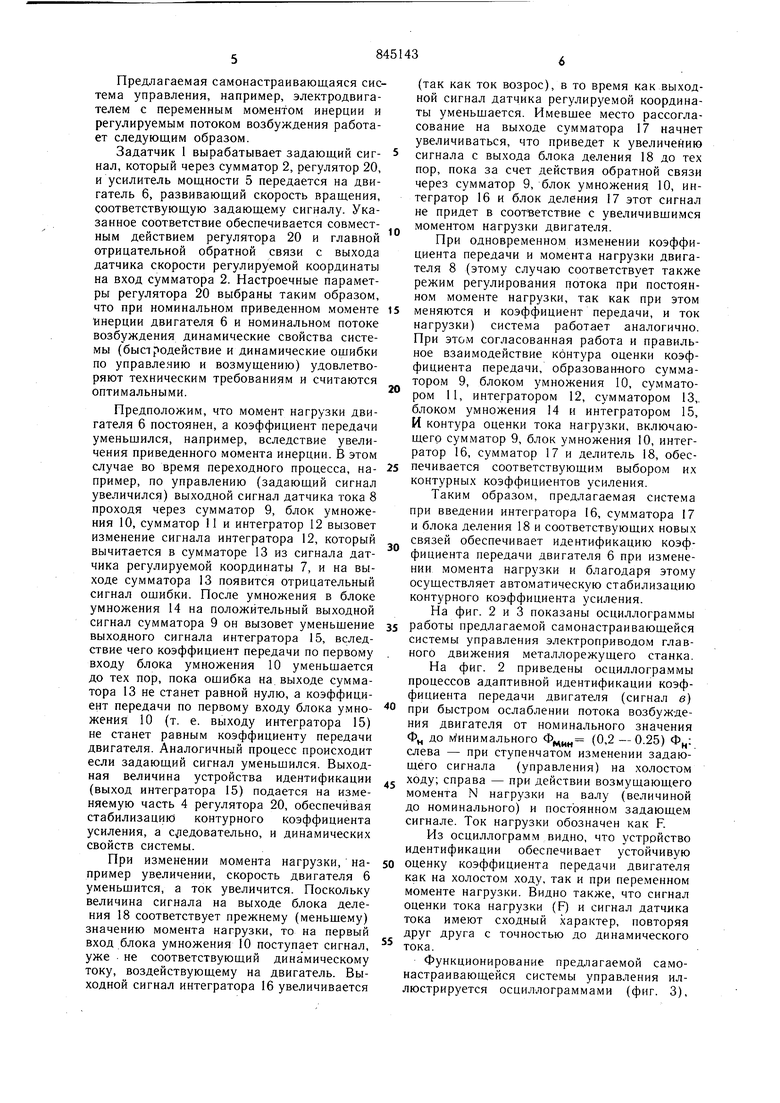
На фиг. 2 и 3 показаны осциллограммы
5 работы предлагаемой самонастраивающейся системы управления электроприводом главного движения металлорежущего станка. На фиг. 2 приведены осциллограммы процессов адаптивной идентификации коэффициента передачи двигателя (сигнал в)
при быстром ослаблении потока возбуждения двигателя от номинального значения Ф„ до минимального (0,2-0.25) Ф„: слева - при ступенчатом изменении задающего сигнала (управления) на холостом
5 ходу; справа - при действии возмущающего момента N нагрузки на валу (величиной до номинального) и постоянном задающем сигнале. Ток нагрузки обозначен как F.
Из осциллограмм видно, что устройство идентификации обеспечивает устойчивую
оценку коэффициента передачи двигателя как на холостом ходу, так и при переменном моменте нагрузки. Видно также, что сигнал оценки тока нагрузки (F) и сигнал датчика тока имеют сходный характер, повторяя друг друга с точностью до динамического
тока.
Функционирование предлагаемой самонастраивающейся системы управления иллюстрируется осциллограммами (фиг. 3), где слева показаны переходные процессы при ступенчатом управлении, минимальном потоке ц„ 0,2 Ф„и максимальном моменте инерции/д,д 3/н (/н- момент инерции двигателя); справа показаны переходные процессы при изменении момента нагрузки и постоянном задающем сигнале, ф 4{ц, и / /н- На обеих осциллограммах показаны переходные процессы до и после включения контура самонастройки. В результате самонастройки время регулирования сокращается в линейной зоне реакции по управлению до 8 раз, что соответствует расширению полосы пропускания с 3 до 20 -/24 Гц. Средняя ошибка стабилизации скорости при действии момента нагрузки уменьшается с 50 - 80% до 7 - 9% (в % от минимальной скорости в диапазоне 1 : 100), т. е. повышается в 7 - 9 раз. Формула изобретения Самонастраивающаяся система управления, содержащая последовательно соединенные задатчик, первый сумматор, регулятор, усилитель мощности и электродвигатель с установленными на нем датчиком регулируемой координаты и датчиком тока, выход которого через последовательно соединенные второй сумматор, первый блок умножения, третий сумматор, первый интегратор, четвертый сумматор, второй блок умножения и второй интегратор подключен к управляющему входу регулятора и второму входу первого блока умножения, первый вход которого подключен ко второму входу второго блока умножения, выход датчика регулируемой координаты соединен со вторым входом первого сумматора и вторым входом четвертого сумматора, выход которого соединен со вторым входом третьего сумматора, отличающаяся тем, что, с целью повышения точности работы системы, в ней установлены последовательно соединенные третий интегратор, пятый сумматор и блок деления, второй вход которого соединен с выходом второго интегратора, а выход - со вторым входом второго сумматора, выход первого блока умножения подключен ко входу третьего интегратора, выход датчика регулируемой координаты подключен ко второму входу пятого сумматора. Источники информации, принятые во внимание при экспертизе 1.Петров Б. Н. Современные методы проектирования систем автоматического управления. М., «Машиностроение, 1967, с. 224 - 225. 2.Авторское свидетельство СССР № 687974, кл. G 05 В 17/02; 1978. 3.Авторское свидетельство СССР № 585475, кл. G 05 В 13/02, 1972. 4.Мысливец Н. Л. и Сабинин Ю. А. Самонастраивающийся электропривод промышленного робота, построенный на базе системы подчиненного регулирования. «Электротехническая промышленность. Серия «Электропривод, 1977, № 8(61), с. 23 - 25 (прототип). Оценка S Сквростб . UnpaSffeMife
Оценка S бО А Оценка S Oife/fffff Cffoflociffii y/rpafAeHix
