Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления электроприводами промышленных роботов, у которых в процессе работы контурный коэффициент усиления изменяется вследствие изменения приведенного момента инерции нагрузки, , динамического передаточного отношения редуктора или регулирования потока возбуждения двигателя.
Целью изобретения является повышение точности и быстродействия работы самонастраивающейся системы (сне) управления электрическим двигателем при пониженном энергопотреблении системы.
На чертеже приняты следуюш,ие обозначения: блок задающего сигнала 1, первый сумматор 2, регулятор 3, блок 4 умножения, усилитель 5 мощности, электричес кий двигатель 6, датчик
7скорости, датчик 8 тока, необратимый редуктор 9, второй сумматор 10, блок 11 деления, логическое устройство 12, третий 13, четвертый 14 сум маторы первый интегратор 15, пятый сумматор 16, второй интегратор 17, задатчик 18 момента инерции двигателя.
Система работает следующим образом.
Блок 1 вырабатывает задаюи ий сиг- -нал, который в сумматоре 2 сравнивается с сигналом отрицательной обратной связи по скорости, формирующимся с помощью датчика 7 скорости.
8сумматоре 2 вырабатывается сигнал ошибки, который через регулятор 3, блок 4 умножения, и усилитель 5 мощности передается на электрический двигатель 6, развивающий скорость вращения, соответствующую за.дающе- му сигналу. Регулятор 3 настраивается таким образом, что при номинальном приведенном суммарном моменте инерции двигателя, номинальном потоке возбуждения и тяговом режиме работы необратимого редуктора динамические свойства системы (быстродействие и динамические ошибки по управлению и возмущению) удовлетворяют техническим требованиям и считаются оптимальными.
Предположим, что момент нагрузки на выходном валу постоянен, а коэффициент передачи двигателя уменьщился вследствие увеличения момента инер5
ции нагрузки. Будем считать, что соотношение величин и знаков сигнала задания и момента нагрузки таковы, что в необратимом редукторе осущест- вляется тяговый режим. В этом случае во время переходного процесса, например, по управлению (сигнал задания увеличивается) выходной сигнал датчика 8 тока, проходя через блоки 10, 11, 14 и 15, вызывает изменение сигнала на выходе интегратора 15, который вычитается в сумматоре 16 из сигнала датчика 7 скорости. Разностный сигнал с выхода сумматора 16 поступа- 5 ет на второй вход сумматора 14, где складывается с сигналом, поступающим с блока 11 деления. В результате сигнал на выходе сумматора 14 уменьшается. Вследствие этого увели-, 0 чивается выходной сигнал блока 11
деления, пропорциональный частному от . деления выходного сигнала сумматора 10 на выходной сигнал сумматора 14. Так будет происходить до тех пор, пока сигнал на выходе четвертого сумматора 14 не станет равным ускорению выходного вала редуктора, а сигнал на выходе блока 11 деления - моменту инерции нагрузки. Далее этот сиг- нал через логическое устройство 12 поступает на вход третьего сумма- . тора 13, на второй вход которого подается сигнал, пропорциональный моменту инерции двигателя с выхода за- 5 датчика 18 момента инерции. На выходе сумматора 13 сформируется сигнал, пропорциональный суммарному моменту инерции, приведенному к валу двигателя, этот сигнал в блоке 4 умножа- 0 ется на сигнал, поступающий с выхода регулятора 3. В результате получаем эффект увеличения общего коэффициента передачи регулятора 3 и блока 4 на величину, пропорциональ- 5 ную уменьшению коэффициента передачи двигателя, и стабилизации контурного коэффициента передачи всей системы в целом.
Аналогично процесс происходит, 50 если задаюш 1Й сигнал уменьшается.
При изменении момента нагрузки, например, при его увеличении, скорость двигателя уменьшаемся, а ток возрастает. Поскольку величина сигна- 55 ла на выходе интегратора 17 соответствует прежнему (меньшему) значению момента нагрузки, то на первый вход блока 11 деления поступает сигнал.
31
уже несоответствующий динамическому току, воздействующему на двигатель. Выходной сигнал интегратора 15 увеличивается (так как ток двигателя возрастает), в то время как сиг нал датчика 7 скорости уменьшается. Под действием появившегося на выходе сумматора 16 отрицательного ла рассогласования выходной сигнал интегратора 17 (его знак отрицате- лен) увеличивается до тех пор, пока не придет в соответствие с увеличивающимся моментом нагрузки.
При одновременном изменении момента нагрузки и момента инерции нагруз ки (этому случаю соответствует также режим регулирования потока возбуждения двигателя при постоянном моменте работа системы происходит аналогично указанному. При этом согласованная работа и правильное взаимодействие контура оценки суммарного момента инерции двигателя, образованного блоками 10-13, 14-16,и 18, и контура оценки тока нагрузки, включающе- го блоки 10, 11, 14-17, обеспечивается соответствующим выбором их контурных коэффициентов усиления.
В статическом равновесном состоянии, характеризующимся тем, что ско- рость d и ускорение ot вала двигателя равны нулю, а момент, разви- .ваемый двигателем М меньше момен
та нагрузки М, необратимый редуктор заклинивается. Это объясняется тем, что под воздействием моментов, прикладываемых к выходным валам необра- тимьрс редукторов (моментов нагрузки) в самотормозящихся передачах этих редукторов создаются только моменты . трения в зацеплении, которые по своей физической сущности не могут быть движущими. В результате вал электрического двигателя в статических состояниях равновесия остается непо- движным при любых моментах нагрузки, действующих на выходной вал необратимого редуктора. Это обстоятельство позволяет отключать электродвигатель самонастраивающейся системы от источника энергии в статических равновесных состояниях.
Теперь рассмотрим случай, когда вследствие смены режима движения изменяется динамическое передаточное отношение редуктора.
определяется для необратимых редукторов соотношением
„/i)X
де t
.
oi.
з М I,
, при Mj -of 0;
, при Mj ot О,
КПД прямого и обратного хода редуктора; скорость вала двига-. теля; момент в зацеплении.
с i + М,
н
где Ij - момент инерции нагрузки; М„ - момент нагрузки; i - кинематическое передаточ- ное отнощение редуктора; oL - ускорение вала двигателя. Чаще всего это происходит при реверсе, торможении или разгоне элетродвигателя. Предположим, что в начальный момент времени соотношение величин и знаков сигнала задания и момента нагрузки таковы, что в необратимом редукторе осуществляется тяговый режим движения, т.е. произведение Mj ot 0. При этом в блоке 12 определяется произведение сигналов и и и, соответственно поступающих на его первый и второй управляющие входы с выходов датчиков 7 и 8 скорости и тока, пропорциональных скорости вала двигателя ы и моменту в зацеплении К . В блоке 12 при положтельном знаке вновь сформированного сигнала устанавливается коэффициент передачи К , пропорциональный динамическому передаточному отношению необратимого редуктора в тяговом режиме.
При реверсе двигателя его скорост некоторое время сохраняет свой знак в то время как знак момента в зацеплении изменяется на противоположный Соответствующим образом изменяются и знаки сигналов датчиков скорости и тока двигателя. При этом происходит смена режиме движения необрати- мового редуктора с тягового на режим оттормаживания. Одновременно изменяется и динамическое передаточ- -ное отношение редуктора. В этом , случае в блоке I2 изменяется знак сигнала, пропорциональный произведению сигналов, поступающих на первый и второй управляющие входы блока с выходов датчиков скорости и тока (М of- 0), поскольку знак сигнала на выходе датчика скорости сохраняет некоторое время свой знак.
а знак сигнала датчика тока меняется на противоположный. В результате в блоке 12 по сигналу, пропорцио нальному произведению (U - х U ), знак которого изменился на противо- положный, устанавливается коэффициент усиления К , пропорциональный динамическому передаточному отношению редуктора в режиме оттормажива- ния.
При смене режима оттормаживания в редукторе при работе СНС на Trfro- вый в блоке идентификации момента инерции происходят аналогичные процессы .
Таким образом, вновь введенное в устройство идентификации переменного суммарного момента инерции двигателя логическое устройство позволяет учесть нелинейные свойства необратимого редуктора, с помвщью которого улучшаются энергетические характеристики всей СНС, а использование блока умножения вместо блока деления - уменьшить число интеграторов и блоков деления, используемых в идентификаторе переменного момента инерции Все это позволяет повысить точность и быстродействие работы как устройства идентификации, так и всей системы в целом.
Формула изобретения
Самонастраивающаяся система управления, содержащая блок умножения, блок деления, первый интегратор, первый и второй сумматоры, последовательно соединенные блок задающего сигнала, третий сумматор и регулятор, второй вход третьего суматора соединен с выходом датчика скорости, вход которого соединен с входом датчика тока и выходом элек- тродвигателя, вход которого соединен с выходом усилителя мощности, выход датчика тока соединен с входом чет-. г вертого сумматора, второй вход кото- рого соединен с выходом второго ин- тегратора, отличающаяся. тем, что, с целью повьшения быстродействия и точности при пониженном , энергопотреблении, дополнительно введены необратимый редуктор, пятый сумматор, задатчик момента инерции двигателя и логическое устройство, первый управляющий вход которого соединен с выходом датчика скорости и входом пятого сумматора, выход которого соединен с входом второго интегратора, а второй вход - с выходом первого интегратора, вход которого соединен с . входом блока деления и выходом второго сумч матора, первый вход которого соединен с выходом пятого сумматора, а второй вход - с выходом блока деления, второй вход которого соединен с выходом четвертого сумматора, вход которого соединен с вторым управляющим входом логического устройства, третий вход которого соединен с выходом блока деления, а выход - с входом первого сумматора, второй вход которого соединен с задатчиком момента инерции двигателя, а выход с входом блока умножения, второй вход которого соединен с выходом регулятора, а выход - с входом уси- лителя мощности, выход электродвигателя соединен с входом необратимого редуктора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| Самонастраивающийся следящий электропривод | 1986 |
|
SU1366992A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1126926A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
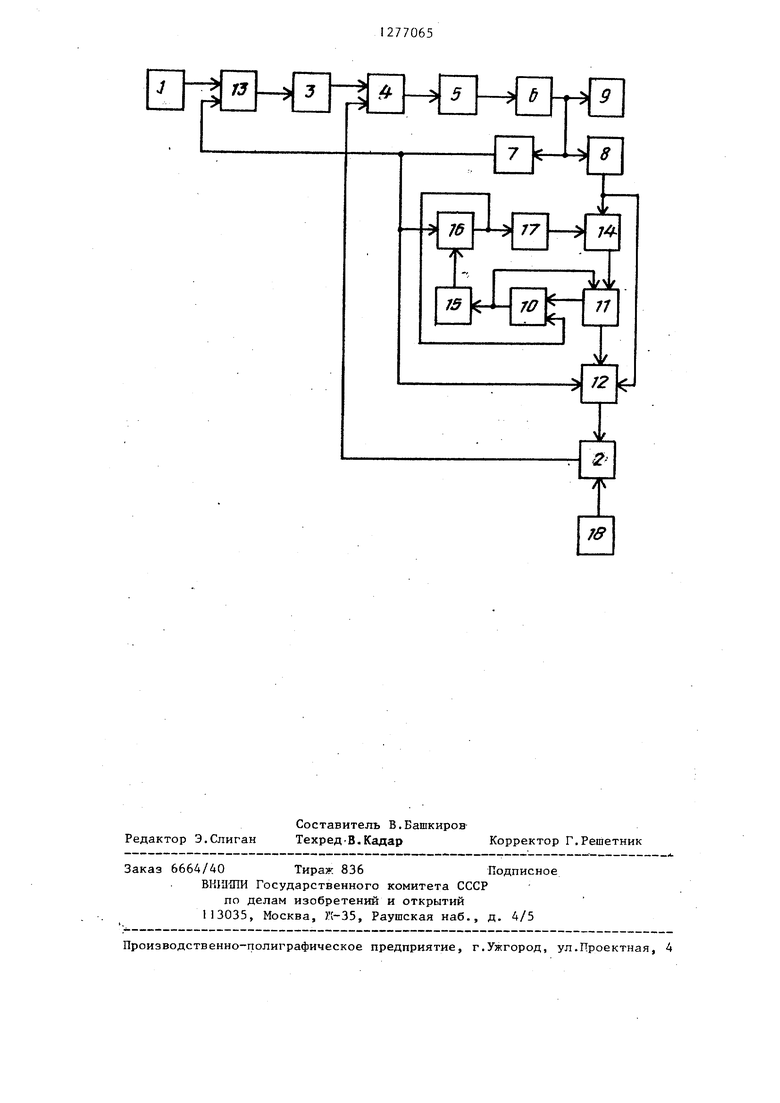
Изобретение касается управления исполнительными электрическими двигателями промьшшенных роботов. Цель изобретения - повьшение .точности и быстродействия системы при пониженном энергопотреблении. Система содержит блок задающего сигнала 1, первый сумматор 2, регулятор 3, блок 4 деления, усилитель мощности 5, электрический двигатель 6, датчики скорости 7 и тока 8, необратимый редуктор 9 и устройство идентификации переменного суммарного момента . инерции двигателя, состоящее из второго 10, третьего 13, четвертого 14 сумматоров, первого и второго интеграторов 15 и 17, блока II деления, логического устройства 12 и задет- чика 18 момента инерции двигателя. В процессе работы блок самонастройки по сигналам, поступающим с датчи-. ков скорости 7 и тока 8 вырабатывает сигнал, пропорциональный суммарному моменту инерции двигателя 6, в функции которого осуществляется коррекция коэффициента передачи регулятора 3. 1 ил. с S (Л
Редактор Э.Слиган
Составитель В.Башкиров- Техред-В.Кадар
Заказ 6664/40 Тираж 836Подписное
ВШП-ШИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, )(-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор Г.Решетник
| Электротехническая промьшлен- ность | |||
| Сер | |||
| Электропривод | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| (прототип). | |||
