1
Изобретение относится к устройстам гидравлического дистанционного правления.рабочим органом, работаюим в автоматическом ре:киме, и может ыть использовано для пропррционсль- 5 ого управления перемещением золотиков.
Целью изобретения является поньше- ние точности управления рабочим орга- ном за счет использования гидрораспределителя с двухсторонним гидрав- лическим управлением.
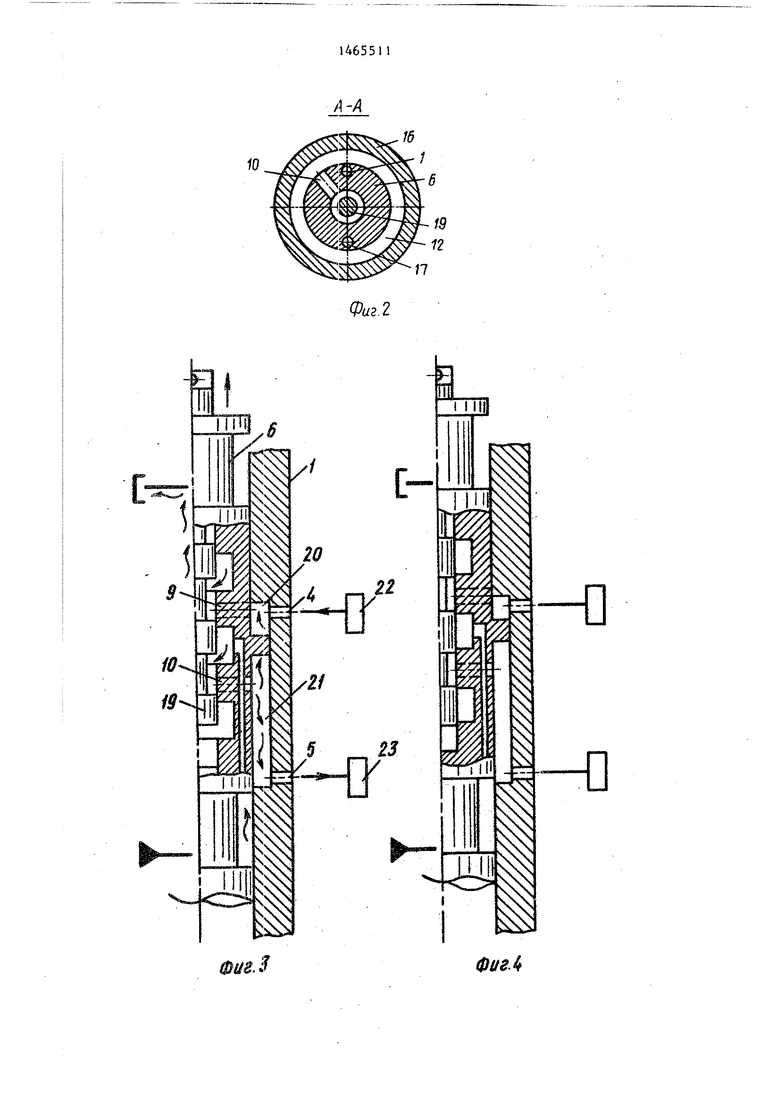
На фиг.1 изображено устройство дистанционного гидравлического уп- равления; на фиг.2 - сечение А-А на фиг.1; на фиг.3-6 - схемы работы устройства дистанционного гидравлического управления.
Устройство дистанционного гидравлического управления ра.бочим органом содержит корпус 1 с каналом 2 подачи, каналом 3 слива и каналами 4 и 5 управления, в котором р асположен уп- равлянщий элемент 6, связанный с кор-25 пусом I тарировочной пружиной 7. Управляющий элемент 6 выполнен в виде поршня 8 с двухсторонш: ми штокакк. В боковых стенках штоков имеются радиальные отверстия 9 и 10, а также кольцевая проточка 11 подачи и коль цевая проточка 12 слива. В щтоке выполнены три внутренние кольцевые проточки 13, 14 и 15, которые связаны с проточкой 11 подачи продольным каналом 16, а с проточкой 12 слива - про-35 дольным каналом 17. С помощью регулировочного болта 18, который соединен
20
30
5
25 35
20
30
с управляющим элементом 6, можно изменять усилие,сжатия тарировочной пружины 7. В управлякщем элементе 6 с возможностью относительного перемещения расположен задающий элемент 19, выполненный в виде плунжера с кольцевой проточкой в центре и двумя дополнительными проточками по краям плунжера. Радиальные отверстия 9 и 10 через рабочие камеры 20 и 21 сообщаются с каналами 4 и 5 управления и далее с линиями 22 и 23 управления золотником гидрораспределителя 24.
Устройство работает следующим образом.
При перемещении задающего элемента 19 в левую или правую сторону от нейтрального положения рабочая жидкость через канал 2 подачи и кольцевую проточку 11 подачи по продольному каналу 16 направляется во внутреннюю проточку 14. Затем в зависимости от направления перемещения за- дающ его элемента 19 через радиальное отверстие 9 или 10 заполняет рабочую камеру 20 или 21 и через канал 4 или 5 управления поступает в гидролинию 22 или 23 управления, а затем вызывает перемещение золотника гидрораспределителя 24 в ту или иную сторону. Одновременно рабочая жидкость в ра- - бочей камере 20 или 21 оказывает давление на поршень 8 и вызывает перемещение управлякяцего элемента 6 в сторону смещения задающего элемента 19, одновременно сжимая тарировочную
пружину 7. Перемещение управляющего элемента 6 происходит до тех пор, пока кольцевая проточка 14 не перекроется пояском задающего элемента 19. Таким образом в гидролинии 22 или 23 управления прекращается подача рабочей жидкости и устанавливается давление управления, определяемое положением задаклцего элемента 19.
Дальнейшее перемещение задающего элемента приводит к дальнейшему увеличению давления управления.
Слив рабочей жидкости из гидролинии 22 или 23 управления при переме- щении золотника гидрораспределителя 24 происходит следующим образом.
Рабочая жидкость по гидролинии 22 или 23 управления перетекает в канал 4 или 5 управления, затем попадает в рабочую камеру 20 или 21, далее в радиальное отверстие 9 или 10, после чего заполняет внутреннюю кольцевую проточку 13 или 15 и по продольному каналу 17 следует в кольцевую проточ- ку 12 слива,которая сообщается с каналом 3 слив а.
Работа гидравлического устройства на снижение давления управления в гидролинии 22 или 23 осуществляется следующим образом.
При движении задающего элемента 19 в сторону, противоположную первоначальному направлению движения, рабочая жидкость из гидролинии 22 или 23 управления через канал 4 или 5 управления, рабочую камеру 20 или 21 радиальное отверстие 9 или 10, внутреннюю кольцевую проточку 13 или 15, продольный канал 17 и кольцевую про- точку 12 слива сообщается с каналом 3 слива. Это приводит к понижению давления управления в гидролинии 22 управления или в гидролинии 23 управления в зависимости от направления перемещения задающего элемента 19. Тарировочная пружина, разжимаясь, перемещает управляющий элемент 6 в сторону движения задающего элемента
19 до тех пор, пока внутреннян кольцевая проточка 13 или 15 не перекроется пояском задающего элемента 19. Таким образом в гидролинии 22 или 23 управления снижается давление управления и устанавливается соответственно положению задающего элемента 19.
Дальнейшее перемещение задаквдего элемента приводит к дальнейшему понижению давления управления.
Формула и. зобретения
Устройство дистанционного гидравлического управления рабочим органом через гидрораспределитель, содержащее корпус с каналами подачи, слива и управления, в котором расположен управляющий элемент, кинематически связанный с корпусом посредством та- рировочной пр жины, внутри которого с возможностью относительного перемещения расположен задающий элемент. Выполненный в виде плунжера с кольцевой проточкой, отличающее- с я тем, что, с целью повышения точности управления рабочим органом за счет использования гидрораспределителя с двухсторонним гидравлическим управлением, управляющий элемент выполнен в виде поршня с двyxcтopoкни ш штоками и имеет расположенные на наружных поверхностях штоков кольцевые проточки подачи и слива, сообщеннь е с посредством продольных каналов .три внутренние проточки и выполненные в штоках радиальные отверстия а задаюшкй элемент имеет две дополнительные кольцевые проточки, при этом каналы подачи и слива корпуса через наружные кольцевые проточки, продольные каналы, внутренние кольцевые проточки и радиальные отверстия управляющего элемента соединены посредством рабочих камер, образованных кор- , порщнем и штоками управляющего элемента, с каналами управления корпуса.
П

| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320903C1 |
| Устройство гидравлического управления рабочим органом | 1984 |
|
SU1265267A1 |
| СЕКЦИОННЫЙ ГИДРОРАСПРЕДЕЛИТЕЛЬ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ И РАБОЧАЯ СЕКЦИЯ СЕКЦИОННОГО ГИДРОРАСПРЕДЕЛИТЕЛЯ С МЕХАНИЧЕСКИМ РУЧНЫМ УПРАВЛЕНИЕМ | 2006 |
|
RU2320902C2 |
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| ГИДРОПРИВОД | 1999 |
|
RU2171774C2 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
| Гидропневматическое устройство ударного действия | 1990 |
|
SU1731945A1 |
| ГИДРОПРИВОД | 1999 |
|
RU2183187C2 |
| СТУПЕНЧАТЫЙ ГИДРОПРИВОД КОМБИНИРОВАННОГО ДЕЙСТВИЯ | 1999 |
|
RU2152900C1 |

Изобретение относится к дистанционному гидравлическому управлению рабочим органом через гидрораспреде- литель. Цель изобретения - увеличение точности управления рабочим органом за счет использования гидрораспределителя 24 с двухсторонним гидравлическим управлением. Устройство содержит корпус 1 с каналами подачи 2, слива 3 и управления 4 и 5. Б корпусе 1 расположён управляющий элемент (УЭ) 6, связанный с ним через тарировочную пружину 7. Внутри корпуса 1 расположен задающий элемент (ЗЭ) 19 в виде плунжера. Выполнен УЭ 6 в виде поршня 8 с двухсторонними штоками и имеет на штоках кольде э сл
Фаг.2
фивЛ
Фиг. 5
Фиг.6
| Васильченко В.А | |||
| Гидравлическое оборудование мобильных машин | |||
| М.: Машиностроение, 1983, с | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Устройство гидравлического управления рабочим органом | 1984 |
|
SU1265267A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
