Изобретение относится к машиностроению и может использоваться в системах управления.
Цель изобретения - повышение надежности.
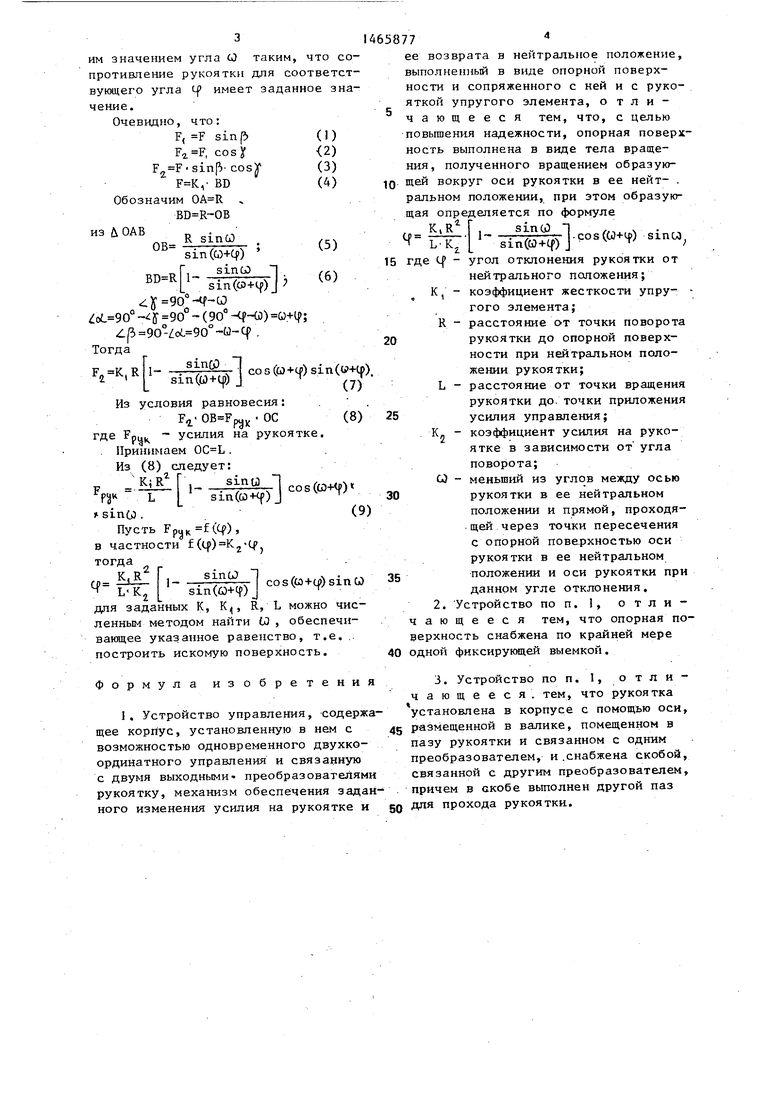
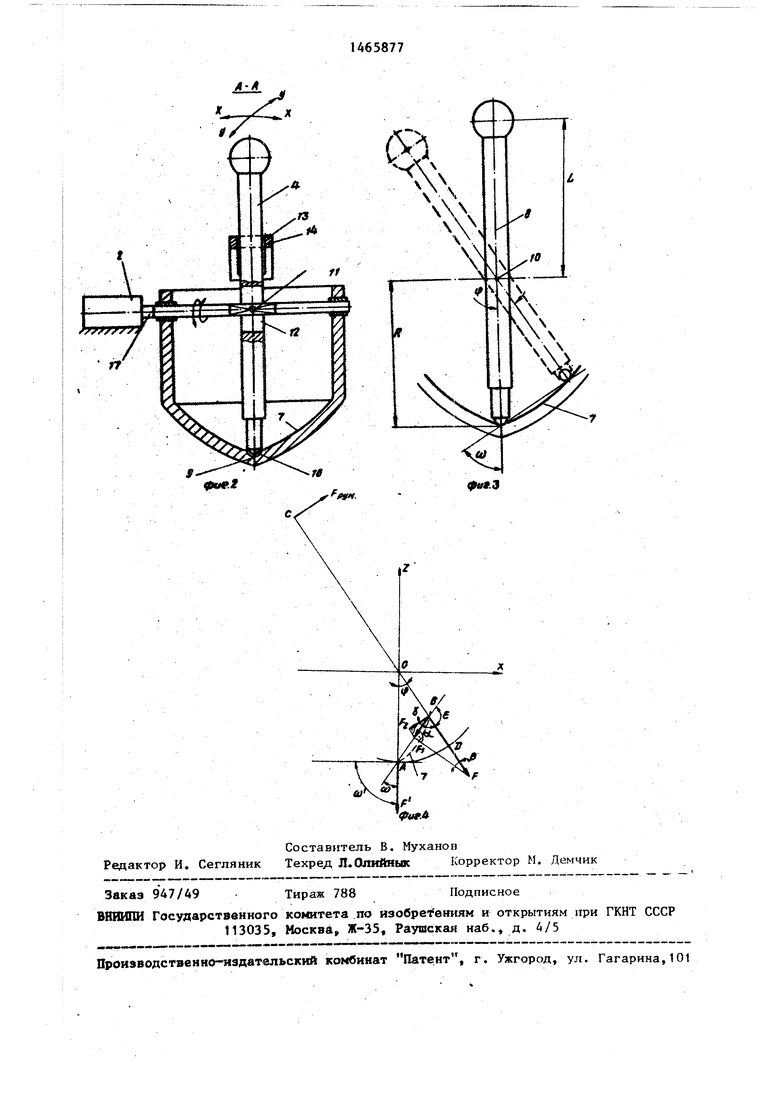
На фиг. I дана конструкция устройства; на фиг, 2 - сечение А-А на фиг. I; на фиг. 3 - схема перемещений рукоятки; на фиг, 4 - схема сил, действующих на рукоятку.
Устройство управления содержит корпус 1, установленную в нем с возможностью одновременного двухкоорди- натного перемещения и связанную с двумя выходными преобразователями 2 и 3, рукоятку 4, механизм обеспечения заданного изменения усилия на рукоятке и ее возврата в нейтральное положение, выполненный в виде опорной поверхности 5 и сопряженного с ней и с рукояткой 4 упругого элемента 6. Опорная поверхность 5 вьшолнена в тела вращения, полученной враще
вателем 2, и проходит в скобе 13 (ее паз У 14), связанной с другим преобразователем 3,
2 Упругий элемент 6 в виде пружины сопряжен с опорной поверхностью через палчец 15 с шариком 16. Преобразователи 2 и 3 связаны с рукояткой своими приводными элементами 17 и 18.
10 Уст юйство работает следующим образом.
При повороте рукоятки 4 вокруг оси 10 скоба 13 при помощи паза 14 поворачивает на соответствующий угол при15 водной элемент 8 преобразователя 3, при этом валик 11 и связанный с ним приводной элемент 7 преобразователя 2 остаются неподвижньми.
При повороте рукоятки 1 на валике
20 1I она скользит вдоль паза 14 скобы 13 установленной на приводном элементе 18, не приводя его во вращение, а рукоятка 4 посредством оси 10 поворачивает валик 11. и связанньй с ним
f ---...--.. ь .u..,.iw. I, .te l. X . XL Ч- . .J dZTriDltTi V- Г1 И,
нием образующей 7 вокруг оси 8 руко-25 приводной элемент 17 преобразоватеятки 4 в ее нейтральном положении,ля 2.
при этом образугацая 7 определяетсяПри повороте рукоятки 4 в любом
по формуле:другом направлении происходят повоfp g J.t, . n- ,«Cn4-f. i cinoP°™ приводных элементов 17 и IB на
т т Т -О v у S1П Ш с -уп
ь-к s.in, JU углы, пропорциональные углам отклонегде угол отклонения рукоятки от ни я рукоятки 4 от первоначального
нейтрального пoлoжeшiя; положения,
К,- коэффициент жесткости упру- . Выемка 9 на опорной поверхности гого элемента;5 обеспечивает фиксацию рукоятки 4
R - расстояние от точки поворота 35 в первоначальном положении.
рукоятки до опорной поверх- При снятии усилия управления с нести при нейтральном положении рукоятки; L - расстояние от точки вращения
рукоятки до точки приложения 40 усилия управления; Kj - коэффи1щент усилия на рукоятке в зависимости от угла ее
поворота; . ,
Q - меньший из углов между осью 43 на рукоятку в точках А и В,
рукоятки в -ее нейтральном по- В первоначальном положении ось ложении и прямой, проходящей рукоятки проходит через точку А. Уп- через точки пересечения с ругий элемент 6 рукоятки 4 воздейст- опорной. поверхностью оси ру- вует на поверхность 5 с силой F . коятки в ее нейтральном поло- JQ Поверхность 5 в точке А расположена жении и оси рукоятки при дан- под углом СО 90°, следовательно, от- ном угле отклонения.сутствует сила, вызывающая поворот
Опорная поверхность 5 снабжена по крайней мере одной фиксирующей выемкой 9.55
Рукоятка 4 установлена в корпусе 1 с помощью оси 10, размещенной в валике II, помещенном в пазу 12 рукоятки 4 и связанном с одним преобразорукоятки 4 в ее отклоненном положении последняя возвращается в первоначальное, положение за счет воздействия упругого элемента 6 через палец 15 и шарик 16с опорной поверхностью 5, вывод формулы образующей 7 которой приводится ниже (фиг. 4). Рассмотрим силы, воздействующие
рукоятки.
При отклонении рукоятки 4 на про- изврльиьй угол Cf усилие упругого элемента F создает силу „, препятствующую повороту рукоятки.
в общем случае каждая точка опорной поверхности характеризуется свователем 2, и проходит в скобе 13 (ее паз У 14), связанной с другим преобразователем 3,
Упругий элемент 6 в виде пружины сопряжен с опорной поверхностью через палчец 15 с шариком 16. Преобразователи 2 и 3 связаны с рукояткой своими приводными элементами 17 и 18.
Уст юйство работает следующим образом.
При повороте рукоятки 4 вокруг оси 10 скоба 13 при помощи паза 14 поворачивает на соответствующий угол приводной элемент 8 преобразователя 3, при этом валик 11 и связанный с ним приводной элемент 7 преобразователя 2 остаются неподвижньми.
При повороте рукоятки 1 на валике
1I она скользит вдоль паза 14 скобы 13 установленной на приводном элементе 18, не приводя его во вращение, а рукоятка 4 посредством оси 10 поворачивает валик 11. и связанньй с ним
,.iw. I, .te l. X . XL Ч- . .J dZTriDltTi V- Г1 И,
приводной элемент 17 преобразовате При снятии усилия управления с
. ,
на рукоятку в точках А и В,
рукоятки 4 в ее отклоненном положении последняя возвращается в первоначальное, положение за счет воздействия упругого элемента 6 через палец 15 и шарик 16с опорной поверхностью 5, вывод формулы образующей 7 которой приводится ниже (фиг. 4). Рассмотрим силы, воздействующие
рукоятки.
При отклонении рукоятки 4 на про- изврльиьй угол Cf усилие упругого элемента F создает силу „, препятствующую повороту рукоятки.
в общем случае каждая точка опорной поверхности характеризуется своим значением угла О таким, что сопротивление рукоятки для соответствующего угла ср имеет заданное значение.
Очевидно, что:
F, F sin ( 1)
, )
F2,F sinf -cosj (3)
BD(4)
Обозначим
из UOAB
OB
R sinCO
sin(O+Cf) sin СО
ь - 1-7Ш
(5) (6)
sin(«+tf)
y gQ -4f-a3 90° - (90 -Cf-a) G)+lf; f5 9o°-M 9o°--o-q,
Тогда
,- условия равновесия:
Frt OB F,,
ОС
(7) (8)
(9)
UD -г pujj
где Грцц усилия на рукоятке. . Принимаем . Из (8) следует:
р :KLRI н -ДНШ.1 cos(Q44) П L sin(Q-Kf)J
sinG).
Пусть (ч) в частности f((f)(f тогда .
для заданных К, К,, R, L можно численным методом найти U , обеспечивающее указанное равенство, т.е. .. построить искомую поверхность.
Формула изобретения
1. Устройство управления, содержащее корпус, установленную в нем с возможностью одновременного двухко- ординатного управления и связанную с двумя ВЫХОДНЫМИ преобразователями рукоятку, механизм обеспечения задан ного изменения усилия на рукоятке и
1465877
ее возврата в нейтральное положение, выполненный в виде опорной поверхности и сопряженного с ней и с рукояткой упругого элемента, о т л и - чающееся тем, что, с целью повьппения надежности, опорная поверхность выполнена в виде тела вращения, полученного вращением образую- 1Q. щей вокруг оси рукоятки в ее нейт- . ральном положении, при этом образующая определяется по формуле
) )
9)
ЧK,R
1 -
sin СО
L-K I sin(Q
J.cos(W-Hf) sinw
15 где - угол отклонения рукоятки от
нейтрального положения; К, - коэффициент жесткости упру- гого элемента;
R - расстояние от точки поворота 20рукоятки до опорной поверхности при нейтральном положении рукоятки;
L - расстояние от точки вращения
рукоятки до. точки приложения 25усилия управления;
К. - коэффициент усилия на рукоятке в зависимости от угла поворота;
СО - меньший из углов между осью 30рукоятки в ее нейтральном
положении и прямой, проходящей через точки пересечения с опорной поверхностью оси рукоятки в ее нейтральном положении и оси рукоятки при данном угле отклонения. 2. Устройство по п. I, отличающееся тем, что опорная поверхность снабжена по крайней мере 40 одной фиксирующей выемкой.
35
3. Устройство по п. 1, отличающееся, тем, что рукоя тка установлена в корпусе с помощью оси, 45 размещенной в валике, помещенном в пазу рукоятки и связанном с одним преобразователем, и.снабжена скобой, связанной с другим преобразователем, причем в скобе вьтолнен другой паз gQ для прохода рукоятки.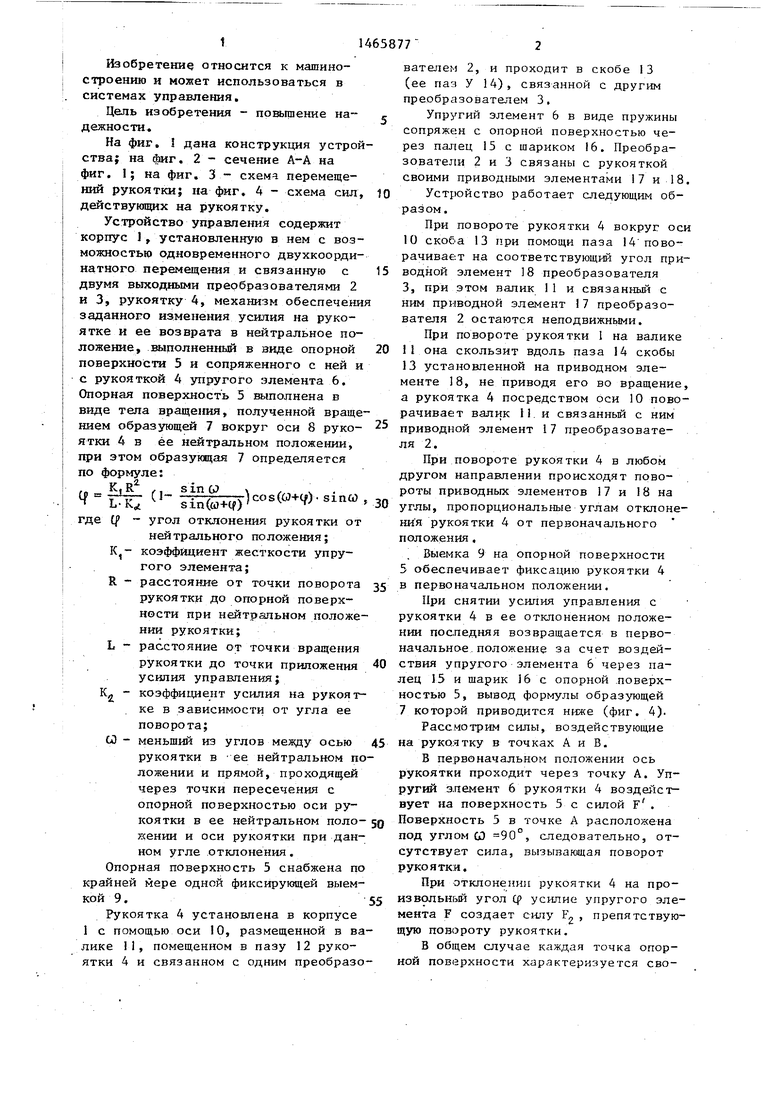
| название | год | авторы | номер документа |
|---|---|---|---|
| Чертежный прибор | 1990 |
|
SU1757918A1 |
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2138775C1 |
| РАБОЧИЙ ИНСТРУМЕНТ | 2013 |
|
RU2640842C2 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| ФРИКЦИОННАЯ ПРЕДОХРАНИТЕЛЬНАЯ МУФТА КАТУШКИ ДЛЯ ЛЕСЫ | 1989 |
|
RU2067392C1 |
| ФИКСИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СТОПОРЕНИЯ ОТКИДНОЙ РУКОЯТКИ НА ВХОДНОМ ВАЛУ ВЫДВИЖНОЙ ОПОРНОЙ СТОЙКИ ПОЛУПРИЦЕПА | 2011 |
|
RU2533762C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1999 |
|
RU2165581C2 |
| РУКОЯТКА ПАЛКИ И ПАЛКА С ТАКОЙ РУКОЯТКОЙ | 2019 |
|
RU2744287C1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2100240C1 |
Изобретение относится к области,. 1 у 1ffo9.t ,. 1 машиностроения и может исйользовать- ся в системах управления. Цель изобретения - повышение надежности. Уст- . ройство управления содержит корпус 1, выходные преобразователи, рукоятку 4, опорную поверхность (СП) 5 и упругий элемент 6. Повьшение надежности обеспечивается тем, что СП 5 выполнена в виде тела вращения, полученного вращением образующей 7 вокруг оси 8 рукоятки 4 в ее нейтральном положении. 2 з.п. , 4 ил. X и % ь ;л 00 «-J S
| Патент США № 4140027, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент США № 3744335, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
