Область техники, к которой относится изобретение
Изобретение относится к области машиностроения, а именно, к механизмам - контроллерам, предназначенным для управления оператором мехатронными устройствами. Контроллер может быть применен в следующих областях: медицинское оборудование, игровая индустрия, трехмерное компьютерное моделирование и дизайн. Более конкретно, изобретение может относится к области контроля и управления роботизированными хирургическими комплексами для проведения минимально инвазивных хирургических операций. В частности, изобретение относится к устройствам для преобразования движения кисти руки хирурга в цифровую команду для управления хирургическим инструментом и для преобразования в обратном порядке, а именно, преобразования цифровых команд в механические движения, передаваемые на кисть руки хирурга.
Предпосылки создания изобретения
Современные роботы повышают производственную эффективность, прежде всего автоматизируя выполнение технологических процессов. Однако, роботы имеют и иные преимущества, создающие основу инновационных технологий и изделий.
Простые системы пользовательского интерфейса могут обеспечивать отдельно задаваемое системой числового программного управления (ЧПУ) управление для каждого подвижного соединения робота, роботизированного манипулятора или другого ведомого устройства. Более сложные системы могут включать ручные контроллеры (иногда в форме джойстика или пистолетной рукоятки), которые воспринимают движение рукой пользователя. Система управления роботом реагирует на эти управляющие сигналы, активируя определенные сервомоторы, соленоиды или другие устройства в роботизированном манипуляторе для обеспечения желаемого действия.
С одной стороны, контроллер, в прямом порядке работы, обеспечивает управление и контроль, с другой стороны, в обратном порядке работы, он обеспечивает тактильное ощущение взаимодействия с технической системой через виртуальный контакт с исполнительным механизмом. В качестве исполнительного механизма может выступать робот или манипулятор, а в качестве тактильного устройства – контроллер, силы воздействия которого ограничены и соизмеримы с силой рук оператора.
Контроллер генерирует один или несколько управляющих сигналов, которые затем используются для управления различными движениями манипулятора, преобразуя механические движения руки по шести степеням свободы в команды для мехатронного комплекса. Контроллер также предоставляет пользователю информацию с обратной связью по силе, поступающей на вход движения, или силе, прилагаемой пользователем.
Контроллер для дистанционного управления движением манипулятора может быть отделен от исполнительного механизма значительным расстоянием (например, находиться в другой комнате или в совершенно другом здании). В качестве альтернативы, контроллер может быть расположен совсем рядом с исполнительным механизмом. Независимо от того, контроллер обычно включает одну или несколько управляющих ручек, которые обеспечивают непосредственный контакт с рукой оператора и которые крепятся к блоку позиционирования контроллера оператора. Такие ручки позволяют производить определение координат кистевого аппарата оператора. Перемещениями управляющей ручки в трехмерном пространстве оператор управляет движениями манипулятора.
В настоящее время существует множество решений, предназначенных для определения координат кисти человека. По особенностям конструкции решения можно разделить на следующие категории:
Устройства, предназначенные для надевания на руку (экзоскелетные устройства).
Устройства, предназначенные для манипулирования как предметом.
Устройства, переназначенные для надевания на руку, представляют собой класс устройств, частично или полностью повторяющих степени свободы кисти человека и имеющих механическую связь с рукой методом внешних по отношению к кисти подвижных элементов, закрепляемых непосредственно на фалангах пальцев, пястье или запястье.
Устройства, предназначенные для манипулирования как предметом, представляют собой класс устройств, частично или полностью повторяющих степени свободы кисти человека и имеющих механическую связь с рукой методом удержания кистью манипуляционного предмета. Закрепление руки или пальцев может присутствовать, но не является необходимым для работы устройства.
Одна из областей применений управляющей ручки контроллера – управление хирургическим роботом, который используется для проведения сложных минимально инвазивных операций.
Робот-ассистированные операции имеют множество преимуществ перед традиционными операциями, например, они позволяют в значительной мере уменьшить объем интраоперационной кровопотери и сократить частоту гемотрансфузий. Процедуры такого рода менее травматичны и поэтому в реабилитационном периоде болевой синдром у пациентов не столь выражен, как при традиционном подходе. Хирургические роботы управляются врачом-хирургом. Перемещениями управляющей ручки в трехмерном пространстве, в шести степенях свободы, хирург управляет движениями конечного эффектора хирургического инструмента.
Известны ручки контроллеров хирурга, которые выполняются в виде копии ручек для лапароскопического инструмента, а также известны специальные модифицированные ручки для контроллера роботохирургического комплекса.
Модифицированные лапароскопические ручки, как правило, используются для случая, когда роботохирургический комплекс функционально реализует только лапароскопические технологии (US 8080004 B2, US 6500188 B2, US 20050222587 A1, US 20050070764 A1 и др.).
Роботохирургические ручки позволяют обеспечить контакт с кистью руки оператора, при котором кисть охватывает ручку полностью, частично или только двумя пальцами. Ручки имеют подвижные смыкающиеся/размыкающиеся части, которые перемещаются под воздействием пальцев, как правило двух или более. Другие устройства для воздействия на них пальцами, как правило - это кнопки. Силовые элементы ручки выполняются как аналоговые - тросики, цифровые - энкодеры или энкодеры и моторы (US 20110040305 A1, US 20030114962 A1, US 20100169815 A1, US 6587750 B2, US 20180132956 A1, US 20120071892 A1).
Известна ручка, охватываемая кистью руки оператора, выполненная с возможностью управления хирургическим инструментом в ответ на движения кисти руки оператора путем преобразования механического движения в электрический сигнал (US 20180168758 A1). Ручка выполнена в виде корпуса, сочлененного с устройством ввода, которое формирует управляющие хирургическим инструментом сигналы в ответ на движение руки оператора. Ручка имеет корпус эргономичной формы с двумя пальцевыми захватами, выполненными с возможностью отведения от продольной оси корпуса для перемещения соосного оси корпуса ручки вала. На продольной оси корпуса установлен датчик (линейный энкодер) для преобразования аналогового сигнала в цифровой и подачи управляющего сигнала на устройство ввода.
Известна ручка контроллера для роботоассистирущих хирургических операций, позволяющая передавать движения руки в движения элементов конструкции комплекса (US 2014192020 A1, опубл. 10.07.2014). Механическая связь с кистью оператора обеспечивается за счет удержания корпуса ручки пальцами руки оператора. Контроллер кисти (ручка) позволяет передавать движения руки оператора в движения элементом конструкции хирургического комплекса. Контроллер кисти оператора имеет две степени свободы. Степень свободы по углу рысканья реализована методом вращения корпуса устройства. Захватывающая степень свободы представлена в виде подвижного элемента, управляемого указательным пальцем.
Существующие разработки управляющих ручек, как следует из анализа известных технических решений, не позволяют в одной конструкции решить следующую совокупность проблем, что понижает эффективность работы:
В контакте руки оператора с управляющей ручкой участвуют только пальцы, как правило, два, или часть кисти оператора. Поэтому вся нагрузка управления и вес управляющей ручки приходится именно на них, что приводит к большей и быстрее наступающей утомляемости, а как следствие – к потере работоспособности оператора, а также к потере точности, скорости и эффективности управления исполнительным механизмом, в частности, хирургическим инструментом.
Отсутствует получение цифрового сигнала о повороте в запястье при охвате управляющей ручки всей кистью оператора.
Отсутствует передача управляющего сигнала от системы управления и преобразование его в механическое движение кисти оператора, полностью охватывающей управляющую ручку.
Отсутствует получение цифрового сигнала о положении (приближении/смыкании/удалении) как минимум двух пальцев оператора, охватывающих вместе с кистью ручку управления.
Отсутствует передача управляющего сигнала от системы управления и преобразование его в механическое движение как минимум двух пальцев оператора, охватывающих вместе с кистью управляющую ручку.
Отсутствует преобразование в согласованный цифровой управляющий сигнал положения кисти оператора и как минимум двух управляющих пальцев для управления хирургическим инструментом.
Одна из главных причин, препятствующая решению проблем, состоит в том, что управляющая ручка является конечным звеном контроллера. Любое изменение или улучшение ручки с применением новых деталей увеличивает ее массу, что приводит к дополнительной нагрузке на руку оператора в процессе управления. Использование тросиков для перемещения масс новых деталей в точку опоры и для уменьшения разгрузки ограничено размерами управляющей ручки и доступом к ней. Использование противовесов, уравновешивающих дополнительную массу ручки, приводит к удвоению динамической нагрузки на руки оператора во время их движения.
Именно решению перечисленных проблем посвящена данная заявка.
Суть изобретения
Технической задачей, на решение которой направлено предлагаемое изобретение, состоит в создании универсального контроллера кисти, позволяющего производить преобразование координат кисти руки человека в цифровую форму, и который является частью системы для управления хирургическим инструментом роботизированного технологического комплекса. При этом контроллер кисти должен наиболее точно, на всей амплитуде и при всех углах, позволять контролировать как минимум один угол поворота кисти руки в запястье, а также перемещение и взаимоположение по меньшей мере двух пальцев, преобразуя эту информацию в цифровой сигнал, передаваемый на управляемый элемент роботизированного технологического комплекса.
Дополнительно контроллер кисти должен обеспечить минимальную нагрузку веса на кисть оператора при управлении, иметь и реализовывать канал обратной связи от элемента роботизированного технологического комплекса или системы управления в целом, преобразуя цифровой управляющий сигнал в механическое перемещение, такое как поворот удерживающей ручку кисти руки оператора и/или механическое перемещение как минимум двух пальцев оператора.
Дополнительно контроллер кисти должен иметь возможность принимать участие в сценариях работы системы управления, таких как блокировка системы в целом, удержание фиксированного положения контроллера оператора.
Дополнительно контроллер кисти должен преобразовать движения кисти оператора в цифровую форму, не создавая существенных ограничений естественной подвижности руки.
С целью решения поставленных задач контроллер кисти оператора используется в составе контроллера оператора для управления роботохирургическим комплексом и включает рукоятку с пальцевыми схватами и блок управления контроллера кисти; причем рукоятка имеет корпус вытянутой эргономичной формы, охватываемый и удерживаемый всей поверхностью кисти оператора во время работы, рукоятка функционально сконфигурирована для обеспечения функции вращения хирургического инструмента вокруг одной оси. При этом корпус рукоятки в верхней части имеет основание с площадкой для крепления к элементу, входящего в состав контроллера оператора, который обеспечивает функцию управления вращения манипулятора с хирургическим инструментом и/или отклонения хирургического инструмента от его продольной оси. Причем площадка основания функционально сконфигурирована для передачи электрических сигналов, а блок управления контроллера кисти расположен внутри корпуса вышеуказанного элемента, входящего в состав контроллера оператора, к которому прикреплена площадка основания. Пальцевые схваты выполнены с возможностью расположения на них пальцев оператора, по меньшей мере один из пальцевых схватов является подвижным и выполнен с возможностью вращения вокруг собственной оси, совпадающей с продольной осью рукоятки, в сагиттальной плоскости для обеспечения функции замыкания или размыкания браншей хирургического инструмента. Внутри корпуса рукоятки расположены на одной оси: механизм поворота рукоятки, включающий датчик поворота, обеспечивающий электрические сигналы, соответствующие изменению положения корпуса рукоятки при отклонении кисти оператора в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости, и передающий их блоку управления контроллера кисти через площадку основания корпуса рукоятки, и приводной элемент рукоятки; механизм поворота по меньшей мере одного пальцевого схвата, включающий датчик поворота, обеспечивающий электрические сигналы, соответствующие изменению положения по меньшей мере одного пальцевого схвата при перемещении пальцев оператора в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости, и передающий их блоку управления контроллеру кисти через площадку основания корпуса рукоятки; и приводной элемент пальцевого схвата. Причем блок управления контроллера кисти функционально сконфигурирован для: передачи полученных сигналов на цифровой блок контроллера оператора и на внешнюю систему управления роботохирургическим комплексом для передачи движения рукоятки и/или по меньшей мере одного пальцевого схвата в соответствующие движения хирургического инструмента; получения управляющих сигналов от внешней системы управления роботохирургического комплекса и передачи их на приводной элемент рукоятки и/или приводной элемент по меньшей мере одного пальцевого схвата для передачи движения хирургического инструмента в соответствующее движение рукоятки и/или пальцевых схватов.
В некоторых вариантах изобретения по меньшей мере один пальцевый схват закреплен на корпусе рукоятки.
В некоторых вариантах изобретения корпус рукоятки оснащен световыми и/или звуковыми и/или тактильными датчиками, а также датчиками давления. Корпус рукоятки также оснащен датчиком приближения.
В некоторых вариантах изобретения цифровой блок управления контроллером формирует управляющие сигналы через блок управления кисти на приводной элемент рукоятки и/или приводной элемент пальцевого схвата для обеспечения поворота рукоятки и/или подвижного пальцевого схвата в сторону, совпадающую с поворотом кисти и/или подвижного пальцевого схвата или в сторону, противоположную повороту кисти и/или подвижного пальцевого схвата соответственно.
В некоторых вариантах изобретения контроллер кисти оснащен тахометрами, измерителями ускорения и нагрузочными элементами индикации силы.
Как показано, указанные задачи решаются за счет изменения конфигурации конструкции контроллера в целом, и в частности, составляющего элемента контроллера - контроллера кисти, который имеет непосредственный контакт со всей поверхностью кисти оператора и, по меньшей мере, двумя пальцами оператора.
Использование предлагаемой архитектуры контроллера кисти сокращает нагрузку на руку оператора, повышает точность определения положения руки и увеличивает диапазон перемещения рук, обеспечивая обратную связь, тактильные ощущения и мобильность, что сводит к минимуму ограничения на способность хирурга манипулировать хирургическим инструментом.
Решение относится к категории контроллеров, предназначенных для манипулирования как объектом, и не требует обязательного механического закрепления руки оператора на элементах конструкции, но данная возможность присутствует.
Объекты и преимущества настоящего изобретения станут более очевидны специалистам после рассмотрения следующего подробного описания и чертежей.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения.
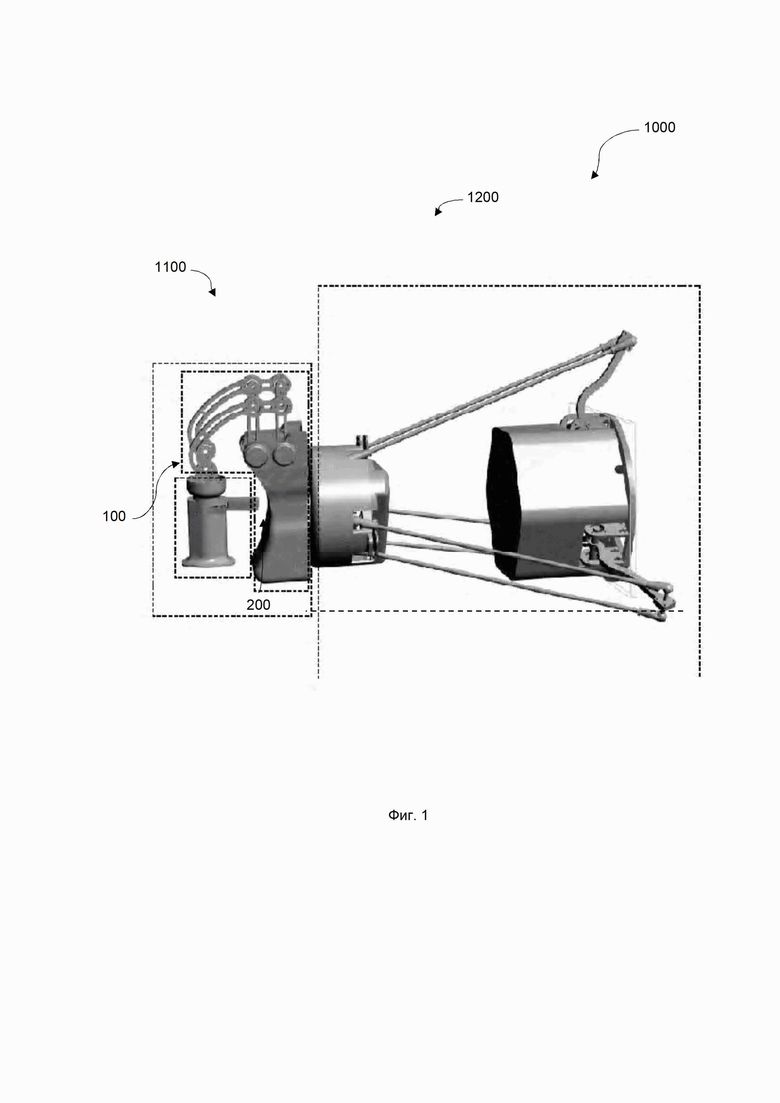
Фиг. 1 иллюстрирует перспективный вид контроллера оператора по настоящему изобретению, предназначенного для управления оператором мехатронными устройствами и имеющего в составе управляющую ручку оператора.
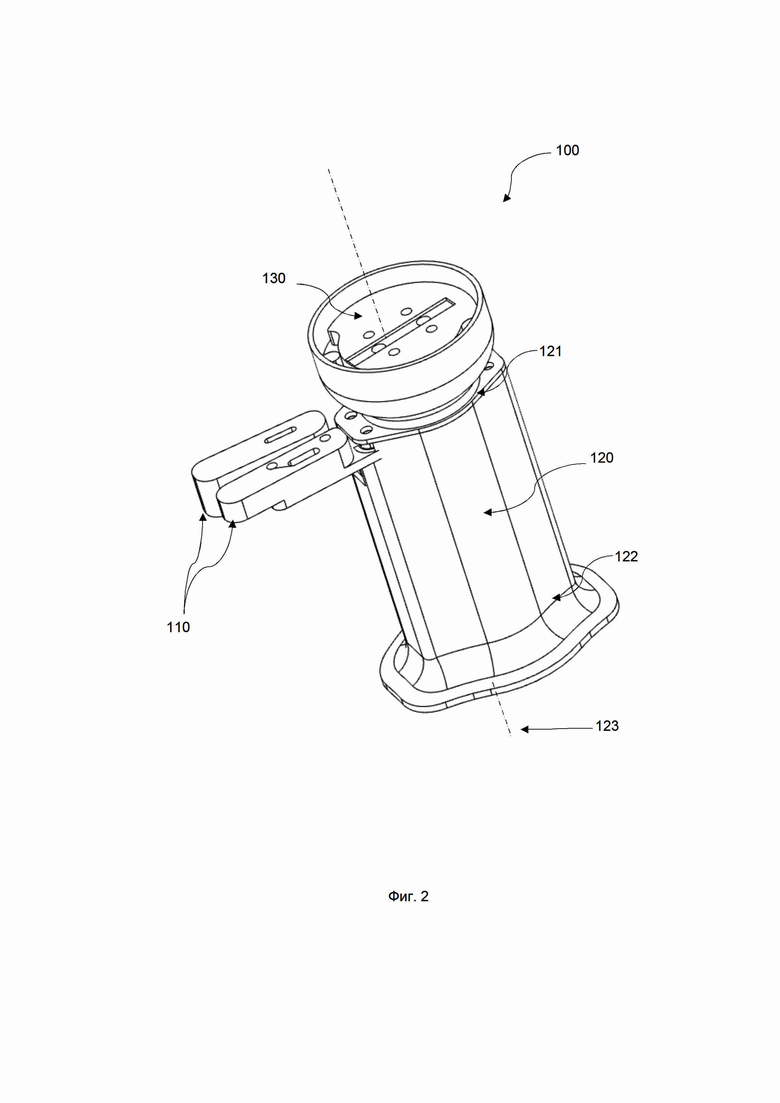
Фиг. 2 иллюстрирует общий вид контроллера кисти для использования в составе контроллера оператора для управления роботохирургическим комплексом.
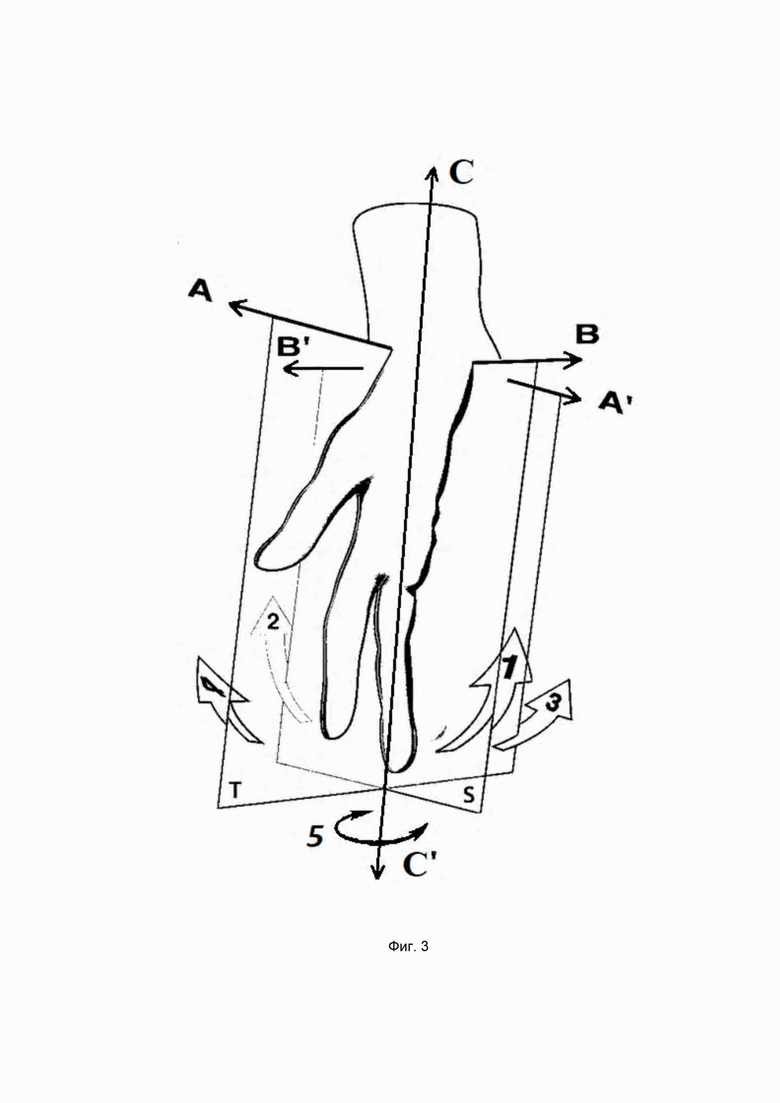
Фиг. 3 схематически отражает плоскости, в которых осуществляются движения кисти оператора в лучезапястном суставе.
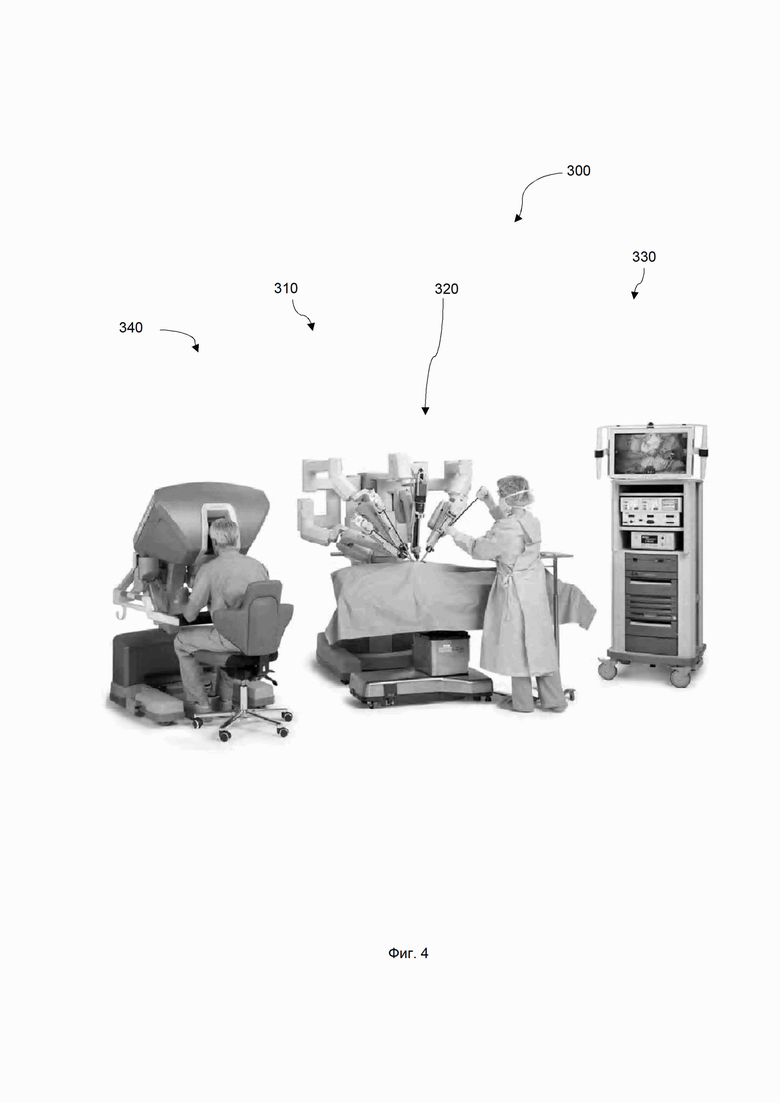
Фиг. 4 иллюстрирует общий вид роботохирургического комплекса.
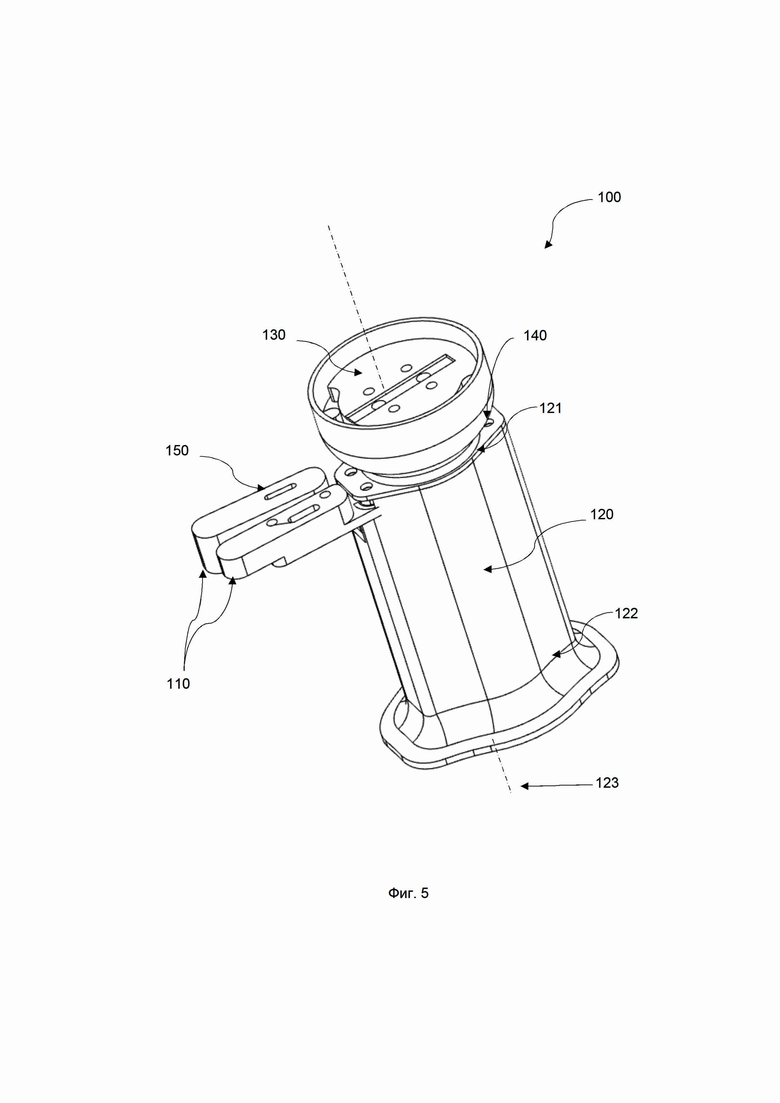
Фиг. 5 иллюстрирует общий вид контроллера кисти с корпусом в перспективе.
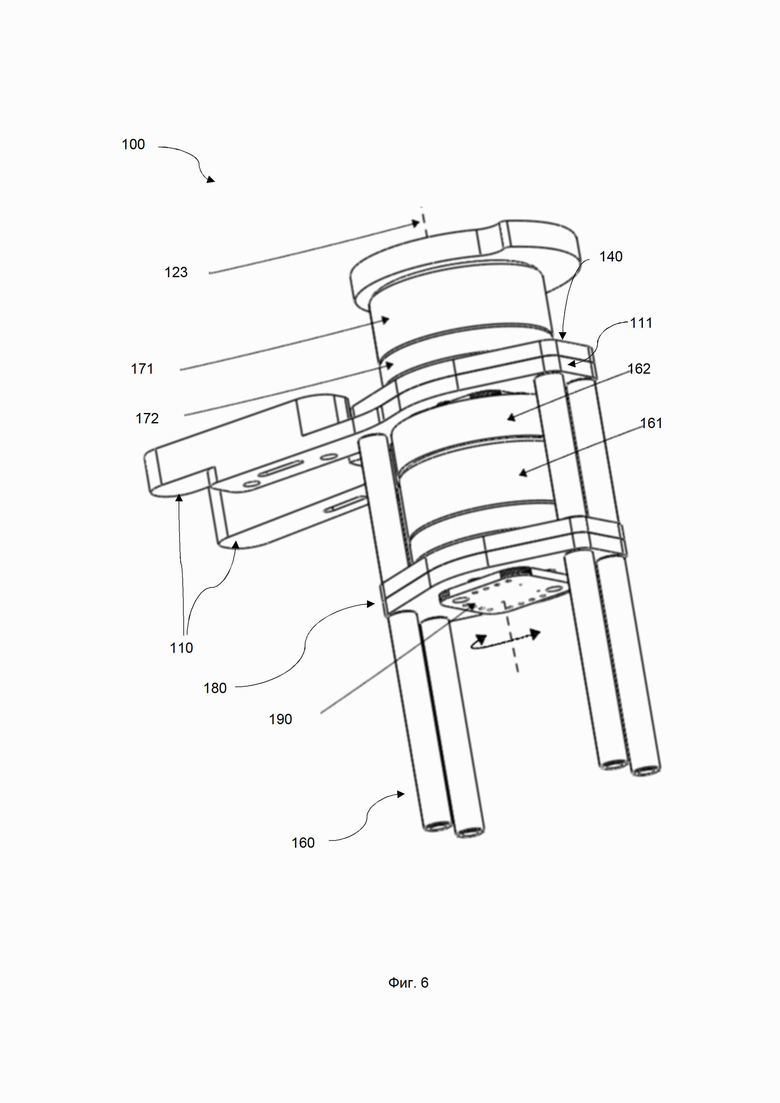
Фиг. 6 отражает общий вид контроллера кисти без корпуса в перспективе.
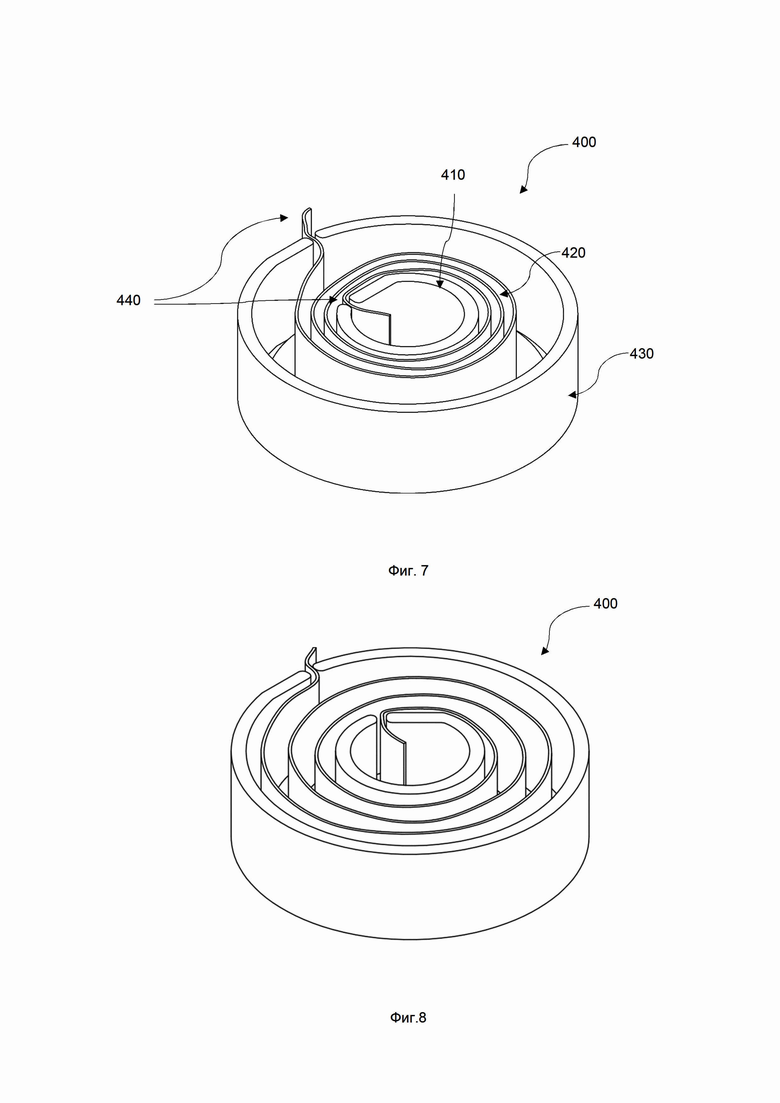
Фиг. 7 представляет общий вид укладки наматываемого передающего электрический управляющий сигнал шлейфа.
Фиг. 8 представляет общий вид укладки шлейфа в ослабленном состоянии.
Фиг. 9 схематически отражает пример замкнутой структуры управления согласно настоящему изобретению.
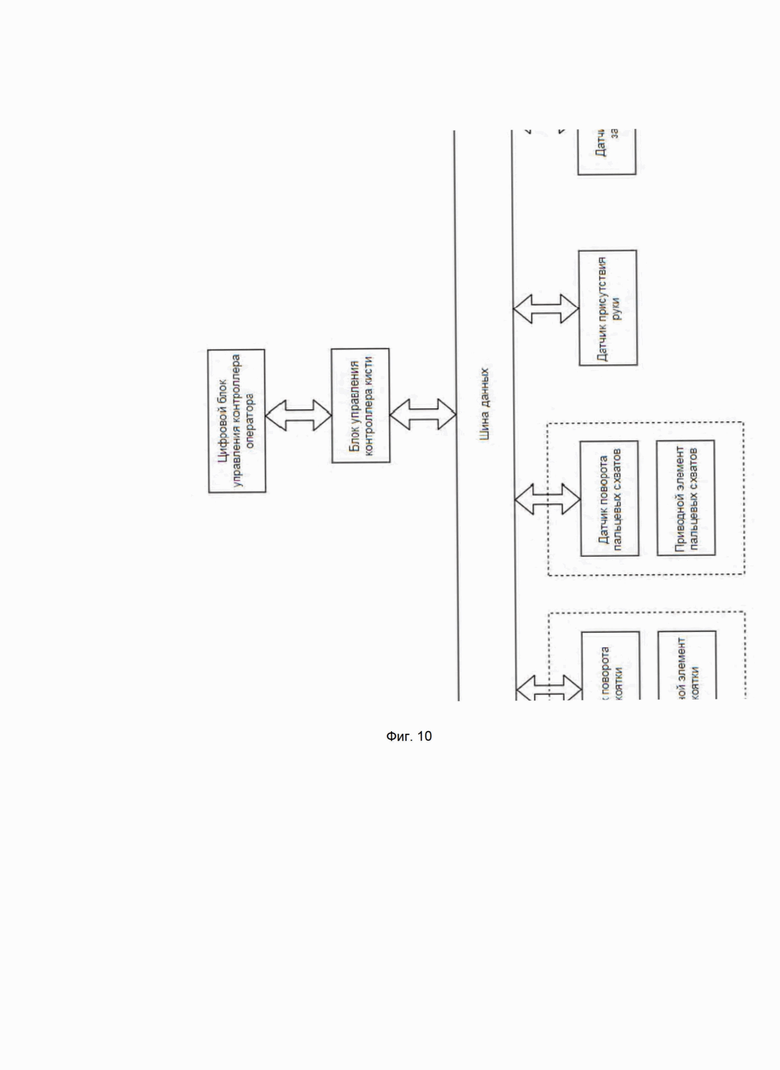
Фиг. 10 схематически представляет блок-схему управления контроллера кисти.
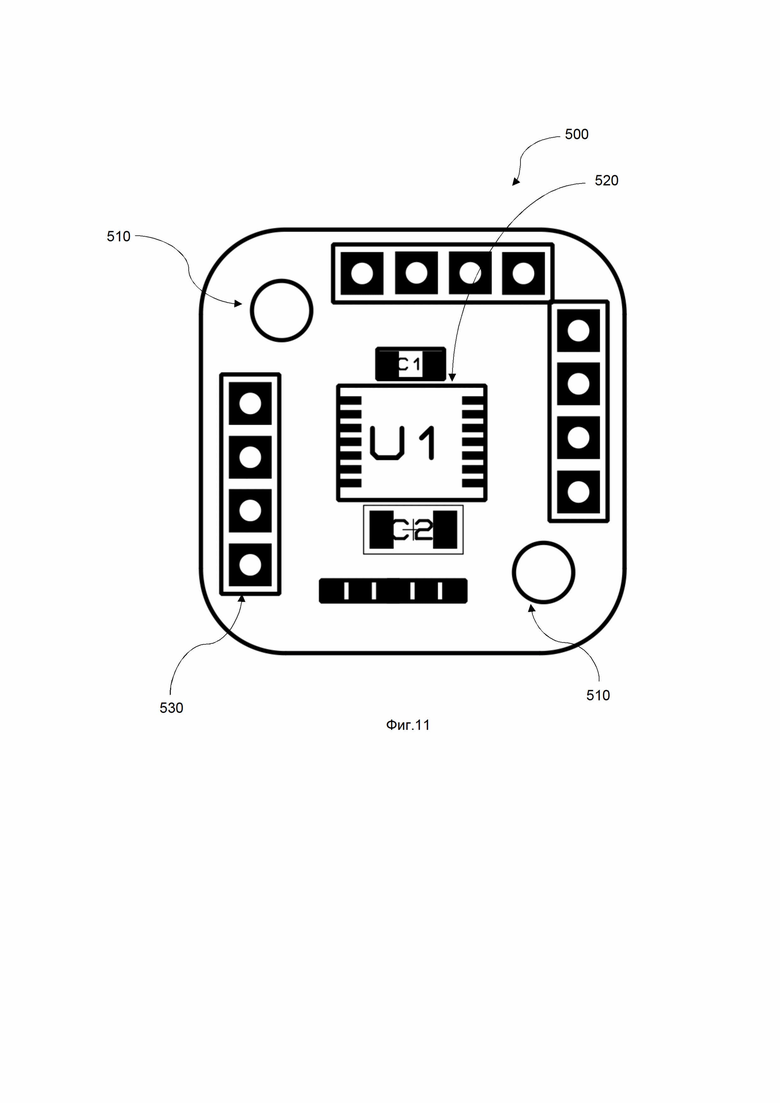
Фиг. 11 приведен сборочный чертеж печатной платы для установки цифрового магнитного энкодера.
Термины и определения
Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е. в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные устройства. Робот-ассистивными системами при проведении операции управляют хирурги.
В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
В настоящей заявке под термином «оператор» понимают производящего операции врача хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
В настоящей заявке используются следующие термины для описания движений кисти в лучезапястном суставе (фиг. 3). Движения кисти происходят вокруг двух осей, когда кисть находится в анатомическом положении, т.е., в положении полной супинации. Поперечная ось АА′ лежит во фронтальной плоскости Т и контролирует движения сгибания и разгибания, осуществляемые в сагиттальной плоскости:
- отклонение (девиация) кисти или флексия (стрелка 1) - передняя (ладонная) поверхность кисти движется к передней поверхности предплечья,
- отклонение (девиация) кисти или экстензия (стрелка 2) - задняя (тыльная) поверхность кисти движется к задней поверхности предплечья.
Переднезадняя ось ВВ′ лежит в сагиттальной плоскости S и контролирует движения приведения и отведения, происходящие во фронтальной плоскости:
- приведение или локтевая девиация (стрелка 3) - перемещение кисти по направлению к продольной оси тела, ее внутренний (ульнарный) край образует тупой угол с внутренним краем предплечья;
- отведение или лучевая девиация (стрелка 4) - перемещение кисти от продольной оси тела, ее наружный (лучевой) край образует тупой угол с наружным краем предплечья.
Продольная ось СС′ лежит на пересечении плоскостей S и Т и контролирует движения вращения кисти:
- поворот лучевой кости (стрелка 5) вместе с кистью вокруг локтевой кости относительно продольной оси.
Под термином «универсальный» в части его использования относительно контроллера в данном документе поднимают контроллер, который «оцифровывает» руку оператора и позволяет не тренировать руку оператора на каждый новый вид инструмента без последующих изменений конструкции контроллера. Освоив контроллер один раз, оператор использует его на протяжении длительного периода своей практики, благодаря свойству контроллера интегрироваться ("представлять" руку хирурга) в различных, в том числе удаленных мехатронных устройствах.
Пот термином «абсолютное положение» в данной документе понимают координату, определенную относительно неподвижного элемента конструкции.
Под термином «датчик поворота» в данном документе понимают устройство, предназначенное для преобразования угла поворота вращающегося объекта в электрические или аналоговые сигналы, позволяющие определить угол его поворота. Для определения значения угла поворота того или иного элемента в принципе подходят все виды угловых датчиков. Однако, в большинстве используемых датчиков требуется, прежде всего, постоянная регистрация и сохранение текущих данных о повороте элемента. Датчики поворота могут быть использованы на основе инкрементальных и абсолютных энкодеров. Датчики имеют цифровые выходные сигналы Linedriver (TTL, RS422), Push-Pull (HTL), SSI, CAN, Profibus, Profinet и другие. Также могут быть использованы датчики на основе аналоговых датчиков угла поворота и/или магнитных датчиков угла поворота.
Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Подробное описание изобретения
Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей, и не предназначено для ограничения объема раскрываемого изобретения.
Контроллер относится к классу механизмов, обеспечивающих преобразование в электронный цифровой сигнал команд, которые человек задает движением руки. Общий вид контроллера изображен на фиг. 1. Контроллер командный цифровой 1000 в целом состоит из управляющей ручки 1100, блока-платформы позиционирования 1200 и цифрового блока управления (не показан на чертеже).
Указанный контроллер 1000 имеет контур прямой связи для того, чтобы задавать команды от оператора через движение его руки мехатронному устройству, и контур обратной связи для передачи в обратном порядке на руку оператора ответных команд-реакций от мехатронного устройства. Контур обратной связи контроллера 1000 предназначен для передачи на руку тактильных ощущений.
Контакт контроллера 1000 с рукой реализуется на управляющей ручке 1100. Управляющая ручка 1100 в целом состоит из контроллера кисти 100 и контроллера запястья 200, каждый из которых обеспечивает две вращательные степени свободы контроллера 1000. Блок – платформа позиционирования контроллера 1200 представляет собой контроллер руки, обеспечивающий три поступательные степени свободы контроллера 1000 путем возвратно-поступательного движения механизма контроллера 1000 по трем взаимно ортогональным осям. При этом на контроллере руки 1200 закреплен контроллер запястья 200, входящий в состав управляющий ручки контроллера 1100. Таким образом, контроллер оператора 1000 контролирует и преобразует в цифровой сигнал движения руки по шести степеням свободы.
Настоящее изобретение в целом относится к контроллеру кисти оператора 100.
Контроллер кисти 100 оператора используется в составе контроллера оператора для управления мехатронным комплексом, в частности, является элементом управляющей ручки 1100, на которой реализуется контакт контроллера оператора 1000 с рукой оператора (фиг. 2). Контроллер кисти 100 предназначен как для приведения в действие элементов мехатронного комплекса в ответ на перемещение пальцев оператора, так и в ответ на отклонение (девиацию) кисти относительно поперечной оси кисти в лучезапястном суставе, осуществляемое в сагиттальной плоскости (фиг. 3, движения 1 и 2), так и для передачи усилий на кисть оператора при симуляции того или иного действия.
Использование контроллера кисти сокращает нагрузку на руку оператора, повышает точность определения положения руки и увеличивает возможный диапазон перемещения руки, обеспечивая при этом обратную связь, тактильные ощущения и мобильность за счет сведения к минимуму ограничений на способность оператора манипулировать тем или иным элементом мехатронного комплекса. Под мобильностью контроллера кисти понимают его характеристику, обеспечивающую возможность не ограничивать динамические характеристики руки оператора во время проведения той или иной операции.
Задачей контроллера кисти является наиболее точно, на всей амплитуде движения руки и при всех углах движения руки, контролировать как минимум один угол поворота кисти руки, который является углом отклонения кисти в лучезапястном суставе в сагиттальной плоскости относительно поперечной оси, лежащей во фронтальной плоскости, и контролировать перемещение, взаимоположение друг относительно друга, как минимум двух пальцев, преобразуя эту информацию в цифровой сигнал.
Дополнительно контроллер кисти должен обеспечить минимальную нагрузку веса на кисть при управлении и реализовать канал обратной связи от цифрового блока управления контроллера и от системы управления мехатронного комплекса в целом, преобразуя цифровой управляющий сигнал в механическое перемещение - отклонение (девиация) кисти руки оператора в сагиттальной плоскости относительно поперечной оси кисти и механическое перемещение как минимум двух пальцев оператора в этой же плоскости.
Контроллер кисти 100 (фиг.2) характеризуется тем, что содержит рукоятку с пальцевыми схватами 110. Рукоятка имеет корпус 120, охватываемый и удерживаемый оператором во время работы. Пальцевые схваты 110 выполнены с возможностью расположения на них пальцев оператора во время работы. Корпус 120 рукоятки имеет верхнюю часть 121 и нижнюю часть 122, продольную ось рукоятки 123.
Контроллер кисти 100 снабжен основанием 130 для крепления элемента, входящего в состав контроллера оператора, который обеспечивает функцию управления вращения манипулятора с хирургическим инструментом и/или отклонения хирургического инструмента от его продольной оси. В частности, таким элементом является контроллер запястья 200. К основанию крепится одна из составных частей контроллера запястья 200 – блок подвижной консоли. Указанная консоль закреплена на площадке основания 130 таким образом, чтобы обеспечивать независимые качательные движения непосредственно самой консоли относительно оси кисти, которая в исходном положении лежит в плоскости, проходящей через средний палец, третью пястную кость и продольную ось предплечья, усилием, передаваемым посредством рукоятки, охватываемой кистью оператора, и поворот рукоятки контроллера кисти 100 относительно оси рукоятки 123 усилием, передаваемым посредством рукоятки, охватываемой кистью оператора. Усилие, передаваемое на рукоятку, для совершения качательного движения консоли контроллера запястья 200 обеспечивается за счет движений приведения и/или отведения кисти, происходящих во фронтальной плоскости. Усилие, передаваемое на рукоятку, для поворота рукоятки вокруг своей оси 123 обеспечивается за счет отклонения (девиации) кисти оператора в сагиттальной плоскости относительно поперечной оси кисти, которая лежит во фронтальной плоскости.
Для уменьшения нагрузки на руку во время работы нагрузка перераспределяется на всю кисть, для чего корпус 120 рукоятки имеет эргономичную форму для удобства охвата всей поверхностью кисти оператора. В отдельных случаях корпус 120 может быть выполнен индивидуально под кисть оператора. Корпус 120 рукоятки внутри полый.
В одном из вариантов осуществления изобретения один пальцевой схват 110 выполнен как одно целое с корпусом 120 рукоятки и неподвижен относительно нее. Другой пальцевой схват 110 подвижен и имеет один поворот (одну степень свободы), вращаясь вокруг своей оси, совпадающей с продольной осью 123 рукоятки.
В одном из вариантов осуществления оба пальцевых схвата 110 могут быть выполнены с возможностью вращения вокруг своей собственной оси, по существу совпадающей с продольной осью 123 рукоятки.
В одном из вариантов осуществления пальцевые схваты 110 могут быть сменным элементом. Количество пальцевых схватов 110 задается индивидуально под каждого оператора. Например, в некоторых вариантах осуществления изобретения один из пальцевых схватов может быть выполнен в виде конструкции для расположения от двух до четырех пальцев оператора.
Внутри корпуса 120 рукоятки расположена рама, на которой смонтированы элементы контроллера кисти, такие как по меньшей мере механизм поворота рукоятки и механизм поворота пальцевых схватов таким образом, чтобы обеспечить оптимальную развесовку блока.
В некоторых вариантах осуществления контроллера кисти согласно изобретению внутри корпуса 120 рукоятки также расположен блок управления контроллера кисти (не показан на чертеже). В некоторых вариантах осуществления контроллера кисти согласно настоящему изобретению указанный блок управления расположен внутри корпуса контроллера запястья 200. Блок управления контроллера кисти контролирует и управляет всеми электронными деталями контроллера кисти 100, такими как: приводные элементы, датчики поворота, датчик наличия руки, датчик усилия захвата и другие, - обеспечивает их взаимодействие по заданным алгоритмам.
Механизм поворота рукоятки включает в себя по меньшей мере датчик поворота для определения абсолютного положения рукоятки относительно ее продольной оси и приводной элемент для вращения рукоятки вокруг ее продольной оси. В предпочтительном варианте осуществления контроллера кисти согласно изобретению приводной элемент для вращения рукоятки и датчик поворота расположены на одной оси, совпадающей с продольной осью рукоятки. Элементы электрически связаны между собой. Рукоятка совершает поворот за счет прилагаемого усилия со стороны кисти оператора при ее отклонении (девиации) в сагиттальной плоскости относительно поперечной оси кисти, которая лежит во фронтальной плоскости.
Механизм поворота пальцевых схватов включает в себя по меньшей мере датчик поворота для определения абсолютного положения пальцевых схватов относительно оси вращения пальцевых схватов, по существу совпадающей с продольной осью рукоятки, и приводной элемент для поворота по меньшей мере одного подвижного схвата вокруг своей оси относительно неподвижного пальцевого схвата. В предпочтительном варианте осуществления контроллера кисти согласно изобретению приводной элемент по меньшей мере одного пальцевого схвата и датчик поворота расположены на оси вращения пальцевого схвата. Все элементы электрически связаны между собой. Пальцевые схваты осуществляют поворот относительно своей оси за счет усилия, прилагаемого пальцами оператора, которые совершают поворот относительно поперечной оси кисти, которая лежит во фронтальной плоскости и совпадает с продольной осью корпуса рукоятки,
Контроллер кисти может решать как прямую задачу - контролировать угол поворота кисти руки оператора относительно поперечной оси кисти и угол поворота по меньшей мере одного пальца оператора относительного поперечной оси кисти и относительно неподвижного пальцевого схвата, - так и обратную задачу, а именно: поворачивать контроллер кисти, удерживаемый кистью оператора, на величину, рассчитанную цифровым блоком управления контроллера. Это необходимо для реализации механизма, позволяющего чувствовать рукой момент касания управляемым инструментом любого предмета или ткани.
При возникновении усилий со стороны оператора контроллер кисти контролирует и оцифровывает отклонение кисти оператора в сагиттальной плоскости относительно поперечной оси кисти, находящейся во фронтальной плоскости (девиация кисти в лучезапястном суставе), а также положение (приближение/смыкание/удаление) как минимум двух пальцев, охватывающих вместе с кистью оператора рукоятку контроллера кисти в области пальцевых схватов.
При повороте рукоятки кистью руки оператора датчик поворота механизма поворота рукоятки формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера кисти, который рассчитывает угол отклонения рукоятки относительно ее продольной оси и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
Пальцевые схваты работают в сочетании. В одном из вариантов осуществления один пальцевой схват выполнен как одно целое с корпусом рукоятки и неподвижен относительно него. Другой пальцевой схват подвижен и имеет один поворот, вращаясь вокруг своей оси, совпадающей с продольной осью рукоятки. Во время работы датчик поворота механизма поворота пальцевых схватов считает угол поворота подвижного пальцевого схвата вокруг своей оси вращения и передает цифровой сигнал в блок управления контроллера кисти, который рассчитывает его положение относительно неподвижного пальцевого схвата и передает эту информацию на цифровой контроллер, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера, которая может быть выполнена на основе ЭВМ.
Цифровой блок управления контроллером на основе полученных данных планирует/рассчитывает траекторию поворота рукоятки и/или пальцевых схватов относительно продольной оси рукоятки и оси вращения пальцевых схватов, которая совпадает с продольной осью рукоятки, и при помощи подачи управляющего сигнала на приводной элемент рукоятки и/или приводной элемент пальцевых схватов перемещает рукоятку и/или пальцевые схваты и непосредственно саму кисть оператора, находящуюся в плотном контакте с корпусом рукоятки, в требуемую позицию.
В некоторых вариантах осуществления контроллера кисти согласно изобретению цифровой блок управления контроллером может обеспечивать управляющие сигналы через блок управления контроллером кисти на приводной элемент рукоятки и/или приводной элемент пальцевых схватов для ускорения и/или противодействия (сопротивления) поворота рукоятки и/или подвижного пальцевого схвата с заданными/расчетными усилиями и ускорениями при прикладывании усилий со стороны оператора. Механизм ускорения/противодействия может быть включен постоянно путем подачи сигнала на цифровой блок управления контроллером с системы числового программного управления (ЧПУ) контроллера.
Таким образом, когда оператор охватывает рукоятку всей поверхностью кисти и поворачивает рукоятку на произвольный угол в сагиттальной плоскости относительно поперечной оси кисти, то в некоторых вариантах осуществления цифровой блок управления контроллером может опосредованно направлять управляющие команды на приводной элемент рукоятки для того, чтобы осуществить поворот рукоятки в сторону, совпадающую с поротом кисти или, наоборот, в сторону, противоположную повороту кисти для противодействия кисти.
При необходимости, на приводной элемент подвижного пальцевого схвата может подаваться управляющий сигнал с цифрового блока управления контроллером для обеспечения поворота подвижного пальцевого схвата в сторону, попутную повороту пальцев при прикладывании усилий со стороны оператора, или в другую, противоположную сторону, противодействуя таким образом силе, прикладываемой пальцами.
Осуществление «попутного» движения указанных элементов контроллера кисти приводит к облегчению перемещения контроллера оператором, уменьшая массу и вес подвижных элементов.
Система числового программного управления (ЧПУ) контроллера обеспечивает преобразование координат рукоятки и пальцевых схватов в координаты управляемого исполнительного устройства мехатронного комплекса и формирование сигналов управления приводами по каждой степени подвижности исполнительного устройства таким образом, чтобы то или иное движение исполнительного устройства соответствовало направлению, в котором оператор воздействовал на рукоятку контроллера кисти в составе контроллера.
Цифровой блок управления контроллером в общем случае является частью многофункционального контроллера и обеспечивает двунаправленный обмен данными между блоком приводов контроллера, блоками управления контроллера кисти и контроллера запястья и дополнительным оборудованием. Цифровой блок управления также имеет возможность синхронного управления указанными механизмами контроллера.
Приводной элемент рукоятки при поступлении управляющего сигнала для приведения его в движение осуществляет поворот рукоятки вместе с жестко прикрепленным корпусом с удерживающей этот корпус кистью руки. Контроль заданного угла поворота осуществляет датчик поворота механизма поворота рукоятки.
Приводной элемент по меньшей мере одного пальцевого схвата при поступлении на него управляющего сигнала для приведения приводного элемента в движение осуществляет поворот подвижного пальцевого схвата на рассчитанный радиус, перемещая таким образом по меньшей мере один палец, удерживающий пальцевой схват, на величину, задаваемую цифровым сигналом от цифрового блока управления контроллером. Радиус поворота подвижного пальцевого схвата контролирует датчик поворота механизма поворота пальцевых схватов.
В некоторых вариантах осуществления контроллера кисти рукоятка и подвижный пальцевой схват могут вращаться по команде от цифрового блока управления контроллером и при отсутствии на рукоятке кисти оператора и пальцев на пальцевых схватах.
В некоторых вариантах осуществления рукоятка может быть оснащена световыми, звуковыми, тактильными датчиками, а также датчиками давления, что позволяет реагировать контроллеру кисти на воздействия самого разного рода при необходимости реализации дополнительных функций.
В некоторых вариантах осуществления контроллера кисти согласно изобретению рукоятка может быть оснащена датчиком движения, в основе которого может лежать любой известный принцип действия. Так, в качестве датчика движения могут быть использованы датчики, выбранные из: инфракрасный датчик, ультразвуковой датчик. В более предпочтительном варианте осуществления для отслеживания минимальных движений, например, движений кисти или пальцев рук, в качестве датчика движения используют датчик присутствия, в принципе работы которого используются две технологии: ультразвуковая и инфракрасная, для определения присутствия людей в помещении. В некоторых модификациях датчика присутствия они выполнены с возможностью определять присутствие людей в помещении, а также их количество, позу и положение их тел, независимо от того, двигаются они или нет.
Датчик присутствия на рукоятке контроллера кисти позволяет контролировать присутствие оператора в зоне, где находится монитор, передающий информацию изображения рабочей области. Датчик присутствия выполнен с возможностью передачи сигнала блоку управления контроллера кисти, контроллера запястья, цифровому блоку управления контроллером. В некоторых вариантах осуществления изобретения цифровой блок управления контроллером при снятии руки оператора с рукоятки контроллера кисти опосредованно через блок управления контроллером кисти получает сигнал от датчика присутствия и направляет управляющие сигналы на блок приводов контроллера, на блок управления контроллера запястьем, на блок управления кисти, которые в свою очередь управляют работой приводных элементов контроллера запястья и приводных элементов рукоятки и подвижного пальцевого схвата соответственно и оснащены электромагнитными тормозами. Электромагнитные тормоза включаются при получении управляющего сигнала от цифрового блока управления контроллером. При этом контроллер блокируется в том положении, в котором он находился в момент подачи сигнала с датчика присутствия, когда оператор убрал руки с рукоятки контроллера кисти. Электромагнитные тормоза также включаются при случайном отключении электропитания.
Таким образом, в дальнейшем контроллер в целом не может изменить свое положение и не может передать сигнал об изменении своего положения опосредованно на систему числового программного управления (ЧПУ) контроллера даже под воздействием приложенных на него сил. В некоторых вариантах осуществления при необходимости датчик присутствия может быть отключен.
В некоторых вариантах осуществления контроллера кисти согласно изобретению, для облегчения сведения/разведения пальца, который полностью соприкасается своей поверхностью с по меньшей мере одним пальцевым схватом, относительно фронтальной оси в сагиттальной плоскости запястно-пястного сустава большого пальца и возвращения пальца в исходное состояние, механизм поворота пальцевых схватов реализует функцию «электронная пружина» за счет наличия приводного элемента. Усилия на электронной пружине могут регулироваться, в том числе индивидуально для каждого оператора.
Кроме этого, сигнал о повороте рукоятки может передаваться в блок управления контроллера кисти через скользящий контакт.
В некоторых вариантах осуществления в дополнение к датчикам поворота для определения абсолютного положения того или иного элемента, входящего в состав контроллера кисти, указанные элементы могут быть оснащены тахометрами, измерителями ускорения и нагрузочными элементами индикации силы, каждый из которых может обеспечивать электрические сигналы, относящиеся к скорости, ускорению и силе, прилагаемым к соответствующему элементу.
Блок управления контроллера кисти может быть сопряжен с цифровым блоком управления контроллером посредством общей шины передачи данных. Цифровой блок управления контроллером выполнен с возможностью записи данных о получаемых или передаваемых командах.
Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi-Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, Глонасс модуль, NFS, Ethernet и т.п.
Перед каждым использованием контроллера происходит его калибровка под пользователя. Контроллер обладает гибкими настройками, что позволяет его ориентировать под разные задачи. При пользовании контроллером его можно полностью адаптировать под оператора и его задачи.
Описание конкретного варианта осуществления изобретения
Одним из перспективных способов применения описанного выше контроллера является использование таких контроллеров в симуляторах хирурга для изучения в виртуальной среде виртуального пациента. С помощью контроллеров пользователь может в виртуальной среде перемещать предметы, поворачивать, хватать и производить все хирургические манипуляции.
Также описанный выше контроллер можно использовать в роботохирургическом комплексе при проведении различных хирургических вмешательств, в том числе в урологии, гинекологии, абдоминальной, нейро- и кардиохирургии. Пример роботохирургического комплекса приведен на фиг. 4.
Роботохирургический комплекс 300 имеет в составе по меньшей мере один манипулятор 310 с прикрепленным к нему хирургическим инструментом 320, блоком управлением манипулятором 330 и интерфейс оператора 340, который получает команды от хирурга, преобразует их в движение хирургического инструмента 320 внутри тела пациента во время проведения хирургической операции и/или обеспечивает все управляющие команды от хирурга комплектующим роботохирургического комплекса. Главным источником команд является рука хирурга. Рука управляет контроллером хирурга, входящего в состав интерфейса хирурга.
Контроллер хирурга преобразует механические движения руки по шести степеням свободы в команды для роботохирургического комплекса 300. Контролер формирует команду на перемещение хирургического инструмента. Дополнительно контроллер выполняет управление поворотами и открытием-закрытием бранша на хирургическом инструменте.
Обычно манипуляторы с хирургическим инструментом смонтированы на хирургическом столе, на котором лежит пациент при проведении операции. В некоторых вариантах осуществления манипуляторы могут быть помещены на тележку или какое-то другое приспособление, в котором манипуляторы будут находиться проксимальнее уровня пациента. Следует понимать, что роботохирургический комплекс 300 может иметь любое число манипуляторов, так, например, один или более манипуляторов. Манипуляторы могут иметь любую конфигурацию.
Каждый манипулятор 310 имеет корпус и узел манипулятора, к которому съемно может быть присоединен хирургический инструмент 320, движение и расположение которого имеет возможность манипулировать хирург с помощью контроллера, который оцифровывает руку хирурга.
Поскольку хирург может управлять движением и ориентацией хирургических инструментов, не держа фактически концы хирургических инструментов, хирург может использовать комплекс как в сидячем, так и стоячем положении. В качестве приспособления для сидячего положения комплекс может быть обеспечен креслом.
Для управления хирургическим инструментом 320 требуется устройство, позволяющее производить определение координат кистевого аппарата хирурга.
Настоящее изобретение, раскрытое в данной заявке, по существу представляет собой контроллер кисти, позволяющий производить преобразование координат кисти руки хирурга в цифровую форму.
Контроллер кисти используется в составе контроллера роботизированного комплекса как для приведения в движение хирургического инструмента и управления захватом или иным технологическим действием, возникающим благодаря размыканию и смыканию браншей хирургического инструмента в ответ на перемещение пальцев хирурга, так и для ведения или передачи усилий на кисть хирурга.
Предлагаемый контроллер кисти предназначен для контакта и взаимодействия с рукой хирурга, в частности, с кистью. Так как контроллер кисти является частью контроллера хирурга, который имеет несколько режимов работы, то эти режимы распространяются и на контроллер кисти:
1) получение координат руки хирурга,
2) перемещение рук хирурга при помощи приводных элементов,
3) полная блокировка перемещений системы,
4) блокировка некоторых степеней свободы системы.
Условно режимы работы по отношению к контроллеру кисти можно разделить на две фазы по направлению передачи команд: фаза передачи команд от кисти руки хирурга контроллеру кисти и фаза передачи команд от контроллера кисти соответственно кисти руки хирурга.
В фазе передачи цифровых команд от кисти руки хирурга контроллеру кисти:
1) обеспечивается связь кисти руки хирурга с контроллером кисти;
2) преобразуется в цифровую форму отклонение кисти в сагиттальной плоскости относительно поперечной оси кисти, находящейся во фронтальной плоскости (девиация кисти в лучезапястном суставе),
3) обеспечивается механическое взаимодействие пальцев кисти руки хирурга с контроллером кисти за счет расположения кисти руки на элементах конструкции (хирург влияет на контроллер кисти за счет расположения руки на конструкции),
4) преобразуется в цифровую форму положение (приближение/смыкание/удаление) двух пальцев хирурга, лежащих на пальцевых схватах контроллера кисти,
5) контролируются скорости и ускорения перемещения пальцев.
В фазе передачи цифровых команд от контроллера кисти к кисти руки хирурга обеспечиваются следующие действия:
1) отрабатываются команды от системы числового программного управления (ЧПУ) на кисть руки хирурга, придавая ей движение поворота на запястье по одной степени свободы;
2) отрабатываются команды от системы числового программного управления (ЧПУ) на пальцы кисти руки, придавая схватам движения сближение/отдаления.
Как показано на фиг. 5, контроллер кисти хирурга представляет собой рукоятку с продольной осью 123, имеющую полый корпус 120 для охвата и удержания его кистью хирурга во время работы (во время проведения хирургической операции или во время использования роботохирургического комплекса в качестве тренажера для отработки действий хирурга), и пальцевые схваты 110 для расположения на них или при необходимости закрепления большого и указательного пальцев хирурга во время работы.
Корпус в изображенном на фиг. 5 варианте осуществления изобретения представляет собой анатомически оптимизированную рукоятку, предназначенную для обеспечения возможностей ее удержания в ладони хирурга и ее обхвата пальцами хирурга.
Нижняя часть 122 корпуса 120 выполнена с нижним упором. Верхняя часть 121 корпуса 120 вплотную соприкасается с верхней площадкой 140, по периметру которой сделаны по меньшей мере четыре отверстия для установки в них элементов рамы, и на которой установлен механизм поворота пальцевых схватов 110.
Элементы рамы представляют собой цилиндрические трубки с отверстиями с нанесенной резьбой на торцах. На механизме поворота пальцевых схватов 110 установлено основание 130 для крепления одного из концов блока подвижной консоли, входящей в состав контроллера запястья. На верхней внешней поверхности пальцевых схватов 110 выполнено отверстие 150 для дополнительной установки пальцевого крепления в случае необходимости. Пальцевые крепления могут представлять собой цилиндрические трубки, которые выполнены из упругого материала (например, резина) или жесткого материала (например, пластик или металл). При необходимости, пальцевые крепления могут быть выполнены в виде размыкаемых цилиндрических элементов (например, в виде хомутов или стягивающих лент) из тканевых, полимерных или иных материалов.
На показанном на фиг. 6 варианте осуществления контроллера кисти согласно изобретению изображен вид контроллера кисти без корпуса.
На верхней площадке 140 закреплены элементы рамы 160, между которыми смонтирован с использованием резьбовых соединений механизм поворота рукоятки, включающий приводной элемент рукоятки для вращения рукоятки вокруг ее продольной оси 123 и датчик поворота (не показан на чертеже) для определения ее абсолютного положения при возникновении усилий со стороны кисти хирурга при отклонениях кисти, осуществляемых в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости.
Приводной элемент рукоятки выполнен в виде ротора двигателя 161, статора двигателя 162, установленных на продольной оси 123 рукоятки посредством резьбовых соединений. На нижней площадке 180, поддерживающей структуру элементов рамы 160, расположена печатная плата 190 для установки на ней датчика поворота рукоятки (не показан на чертеже), который в данном случае может быть выполнен в виде энкодера оптического, магнитного или иного принципа действия или в виде переменного резистивного элемента.
Механизм поворота пальцевых схватов, расположенный на верхней площадке 140, состоит из приводного элемента пальцевого схвата, расположенного на оси вращения по меньшей мере одного пальцевого схвата, которая совпадает с продольной осью 123 рукоятки, и датчика поворота для определения абсолютного положения пальцевых схватов при создании усилия пальцев при их перемещении относительно поперечной оси кисти, которая лежит во фронтальной плоскости и совпадает с продольной осью корпуса рукоятки в сагиттальной плоскости. Датчик поворота пальцевых схватов может быть выполнен в виде энкодера оптического, магнитного или иного принципа действия или в виде переменного резистивного элемента (не показан на чертеже). Микросхема энкодера расположена на печатной плате под соответствующей площадкой аналогичным описанным выше способом.
Приводной элемент пальцевых схватов выполнен в виде ротора двигателя 171, статора двигателя 172, установленных на продольной оси вращения пальцевых схватов посредством резьбового соединения, совпадающей с продольной осью рукоятки 123.
Один пальцевой схват 110 сделан как единое целое с площадкой для фиксации пальцевых схватов 111, которая располагается ниже вплотную к верхней площадке 140 и имеет соосные отверстия для установки в них элементов рамы 160. Указанный пальцевой схват неподвижен относительно указанной площадки 111 и рукоятки в целом. Второй пальцевой схват 110 закреплен на площадке 111 посредством резьбового соединения и подвижен относительно площадки и рукоятки в целом.
Ось вращений пальцевых схватов и продольная ось рукоятки контроллера кисти, относительно которой поворачивается корпус рукоятки, совпадают, что является близким к естественным движениям кисти человека. Для достижения наилучшего результата по эффективности работы, оси вращений дополнительных степеней свободы внешних устройств должны проходить через точку, образованную пересечением продольной оси рукоятки контроллера кисти и плоскости, определяемой треугольником, образованным точкой пересечения пальцевых схватов и точками их концов. Данное требование не является обязательным и зависит от реализации внешнего устройства.
Энкодеры могут быть выполнены в виде аналоговых устройств, таких как потенциометры, система вращающихся трансформаторов; или в виде цифровых устройств, таких как оптический абсолютный датчик угла на основе кода Грея или какого-либо другого цифрового устройства.
Контроллер кисти снабжен датчиком присутствия, расположение которого выбрано таким способом, чтобы предотвратить ложные срабатывания и исключить пропуск события появления руки хирурга. Датчик присутствия руки может служить для предотвращения непредвиденного вращения контроллера руки или для передачи информации о наличии руки на цифровой блок контроллера. Датчик может быть выполнен в виде датчика расстояния оптического или иного типа, емкостного датчика прикосновения или в любой другой форме. В показанном варианте осуществления изобретения датчик присутствия может быть расположен на нижней поверхности площадки 111 пальцевого схвата 110, на котором располагается указательный палец хирурга.
Контроллер кисти снабжен датчиком усилия захвата, который расположен между пальцевыми схватами большого и указательного пальца и предназначен для преобразования в электрический сигнал данных об усилии сжатия.
При осуществлении поворота элементов пальцевого схвата, хирург производит смыкание большого и указательного пальцев, создавая механическое усилие на датчик усилия захвата. Данные об усилии могут быть использованы для осуществления таких функций, как измерение силы сжатия для захвата предметов с различным давлением хирургическим инструментом, в качестве сигнала быстрого доступа к дополнительным функциям, при необходимости, например, блокировки захвата, или другим. Датчик может представлять собой цифровое устройство, такое как тактовая кнопка, или аналоговое, такое как тензометрический датчик, или другое.
Все элементы контроллера кисти электрически соединены между собой. Для электрической передачи энергии и информации между неподвижными и вращающимися узлами приводного элемента рукоятки в конструкции применен способ круговой укладки наматываемого шлейфа, условно называемый «улитка».
Принцип работы заключается в передаче электрических сигналов через плоский шлейф, один конец которого закреплен на неподвижном основании, другой – на вращающейся детали. Плоскость шлейфа параллельна оси вращения элементов конструкции, что позволяет организовать намотку и размотку шлейфа при совершении конструкцией угловых перемещений.
На фиг. 7 приведен общий вид укладки наматываемого шлейфа 400. Цифрами на фиг. 7 обозначены: 410 – ротор; 420 – плоский шлейф; 430 – статор; 440 – места закрепления шлейфа на неподвижных и вращающихся узлах приводного элемента рукоятки.
Для иллюстрации принципа на фиг.8 приведен общий вид укладки шлейфа 400 в ослабленном состоянии. Описываемый принцип обладает следующими преимуществами:
высокая надежность, обеспечиваемая отсутствием критических углов изгиба проводников, отсутствием пар трения проводников;
возможность передачи существенного количества электрической энергии.
Блок управления контроллера кисти контролирует и управляет всеми электронными деталями, такими как приводные элементы, датчики поворота, датчики положения, датчик наличия руки, датчик усилия захвата и другими, обеспечивает их взаимодействие по заданным алгоритмам. Блок управления контроллера кисти формирует цифровые команды, передаваемые через цифровой блок контроллера, систему числового программного управления (ЧПУ) контроллера, систему управления роботохирургическим комплексом на управляющие элементы хирургического инструмента, управляя им.
Контроллер кисти руки работает следующим образом. Оператор располагает кисть руки на корпусе рукоятки таким образом, что указательный и большой пальцы оказываются на пальцевых схватах, а корпус рукоятки зажат между ладонью и пальцами. Девиация кисти в лучезапястностном суставе вызывает поворот корпуса. Перемещение указательного пальца хирурга вызывает перемещение пальцевого схвата относительно корпуса контроллера кисти. При этом возникновение усилий со стороны хирурга при охвате кистью руки корпуса контроллера кисти для его поворота вызывает поворот хирургического инструмента одной оси, а возникновение усилий со стороны хирурга при перемещения пальцевых схватов обеспечивает смыкание или размыкание браншей хирургического инструмента. Необходимо отметить, что контроллер кисти позволяет реализовать одновременно несколько действий хирургического инструмента.
Бранши хирургического инструмента повторяют движение пальцевых схватов. Механизм взаимодействия реализован таким образом, что в позиции полного смыкания браншей пальцевые схваты находятся близко, но не полностью сомкнуты. Продолжение смыкания пальцевых схватов из этой позиции преобразуется за счет датчика усилия захвата в сигнал, повышающий усилие сжатие сомкнутых браншей хирургического инструмента.
При повороте корпуса рукоятки кистью руки хирурга датчик поворота механизма поворота рукоятки формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера кисти, который рассчитывает положение рукоятки относительно ее продольной оси и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера.
Пальцевые схваты работают в сочетании. Во время работы датчик поворота механизма поворота пальцевых схватов считает угол поворота подвижного пальцевого схвата вокруг своей оси и передает цифровой сигнал в блок управления контроллера кисти, который рассчитывает его положение относительно неподвижного пальцевого схвата и передает эту информацию на цифровой контроллер, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) контроллера.
Контроллер кисти может решать как прямую задачу - контролировать угол поворота кисти руки, так и обратную задачу, а именно, поворачивать удерживающую контроллер кисть на величину, рассчитанную системой числового программного управления (ЧПУ) контроллера. Это необходимо для реализации механизма, позволяющего чувствовать рукой момент касания инструментом любого предмета или ткани.
Сигнал от системы управления роботохирургическим комплексом передаётся на систему числового программного управления (ЧПУ), далее на цифровой блок управления контроллером, который на основе полученных данных планирует траекторию поворота рукоятки и/или пальцевых схватов относительно поперечной оси кисти и при помощи подачи управляющего сигнала на приводной элемент рукоятки и/или приводной элемент пальцевых схватов перемещает рукоятку вместе с удерживающей ее кистью руки и/или пальцевые схваты вместе с удерживающими их пальцами хирурга в требуемую позицию. Мощность используемых приводных элементов позволяет обеспечить передачу значительного усилия на кисть руки оператора.
Контроль вращений, создаваемых приводными элементами механизмов поворота пальцевых схватов и рукоятки, может быть осуществлен за счет замкнутой структуры управления. Пример структурной схемы такой системы представлен на фиг. 9. Как видно из фиг. 9, блок управления контроллера кисти связан с драйверами двигателей, двигателями и энкодерами. На фиг. 10 представлена общая схема управления контроллером кисти. Цифровой блок управления контроллером связан с элементами контроллера кисти через общую шину данных. Использование общей шины не является обязательным условием, возможна реализация с применением нескольких шин или с применением топологии «звезда».
Блок управления контроллера кисти получает сигнал опосредованно от системы управления роботохирургического комплекса, после чего создает управляющий сигнал, поступающий на драйвер двигателя либо механизма поворота пальцевых схватов, либо механизма поворота рукоятки. Двигатель вращает элементы конструкции контроллера кисти согласно заданному системой управления закону. Процесс вращения передается на энкодер, связанный непосредственно с блоком управления кистью.
Структура подобного типа может иметь различные режимы работы, такие как:
Измерение угла с использованием энкодера при выключенном двигателе;
Перемещение в заданное угловое положение за счет двигателя;
Создание сопротивления или сопровождения движению согласно какому-либо заданному закону.
В режиме создания сопротивления движению возможна реализация «электронной пружины» для степени свободы пальцевого схвата. Данная функция может быть полезна для использования контроллера кисти без закрепления фаланг пальцев. В этом режиме площадка для указательного пальца перемещается двигателем степени свободы пальцевого схвата для возврата в разомкнутое положение. Программное ограничение мощности двигателя позволяет пользователю совершать захватывающие движения против его вращения. Такая система позволяет повысить точность движений хирургического инструмента и может быть реализована также посредством математической пружины, которая может быть как включена, так и выключена.
Конкретный пример осуществления изобретения
Разработанная конструкция контроллера кисти обладает следующими техническими характеристиками:
Две степени свободы для определения угла поворота кисти и угла захвата между указательным и большим пальцами;
Угловая разрешающая способность: 0.02197 градуса (14 бит);
Номинальная частота дискретизации для передачи данных на ведущее устройство: 250 Гц;
4 Номинальная частота работы системы автоматического управления: 1000 Гц;
5. Интерфейс передачи данных для доступа к энкодерам: шина I2C 400 кГц 3.3 В;
6. Адресация устройств на шине данных: устанавливается аппаратно;
7. Тип и количество двигателей: 2 бесколлекторных двигателя постоянного тока (BLDC);
8. Интерфейс управления двигателями: подключение к обмоткам управления;
9. Сопротивление обмоток мотора: 8 Ом;
10. Тип механизма для передачи энергии во вращающиеся элементы: наматывающийся шлейф (улитка).
Для того, чтобы обеспечить указанную разрешающую способность, которая определяет чувствительность хирургического инструмента и которая позволяет наиболее точно определять положение руки хирурга, что ведет к более точному управлению хирургическим инструментом, используют определенную архитектуру, обладающую малыми люфтами, наличием избыточных кинематических связей для повышения жесткости контроллера кисти (механика +подшипники), и применяют различные комбинации двигателей и энкодеров с установленными к ним требованиям.
Энкодеры и двигатели могут быть как стандартными, покупными, так и специально разрабатываемыми под определенную задачу. Например, конструкция энкодер-двигатель может быть цельным отдельным блоком, интегрированным в контроллер кисти.
В качестве приводных элементов могут быть применены бесколлекторные моторы постоянного тока. Выбор моторов обусловлен требованиями к системе: сравнительно низкая частота вращения, большой вращающий момент, малая масса и габаритные размеры. Недостатком таких моторов является необходимость в наличии системы автоматического управления для регулирования оборотом и вращающего момента, что не является существенной сложностью в рамках описываемого решения. Преимуществами использования бесколлекторных моторов является высокая надежность и долговечность за счет отсутствия коллекторного узла, подверженного износу.
Для точного определения углов поворота степеней свободы в контроллере кисти были применены высокоточные бесконтактные энкодеры на основе массивов датчиков Холла. На осях вращения каждой степени свободы находятся неодимовые магниты диаметральной намагниченности, вблизи которых расположены корпуса микросхем.
Энкодеры данного типа обладают такими преимуществами, как высокая разрешающая способность (14 бит, 0.0219 градуса), возможность цифровой установки нулевого положения, высокое быстродействие, цифровой контур статуса и диагностики.
Для организации доступа к энкодерам в контроллере кисти применена цифровая шина I2C, работающая на частоте 400 кГц. Шина позволяет производить доступ ко всем регистрам энкодеров. Топология в виде общей шины имеет существенное преимущество в сокращении числа необходимых контактов по сравнению с топологией «звезда», что уменьшает количество точек отказа системы.
Энкодеры на основе магнитного эффекта обладают рядом особенностей эксплуатации, которые влияют на точность измерения:
Чувствительность к шумам источника питания;
Наличие оптимального расстояния от корпуса микросхемы до вращающегося магнита;
Чувствительность к линейному смещению оси вращения магнита.
Для достижения максимальной точности и чувствительности была разработана и применена печатная плата для установки микросхемы энкодера с учетом перечисленных особенностей (фиг. 11).
Точное пространственное позиционирование корпуса микросхемы относительно вращающегося магнита обеспечивается за счет крепежных отверстий 510 в печатной плате 500. Прижим печатной платы 500 к прилегающей поверхности реализуется за счет отсутствия по контуру платы 500 объемных элементов. Контактные площадки питания и данных предназначены для пайки проводов в обратную сторону от микросхемы энкодера. Стабильное напряжение питания и защита от импульсных помех обеспечивается применением двух конденсаторов в линии питания.
На фиг. 11 приведен сборочный чертеж печатной платы 500 для установки цифрового магнитного энкодера. На фиг. 11 обозначено: 520 – посадочное место микросхемы энкодера, 510 – Крепежные отверстия печатной платы, 530 – контактные площадки питания и данных.
Таким образом, разрабатываемый контроллер кисти позволяет преобразовать движения кисти хирурга в цифровую форму, не создавая существенных ограничений естественной подвижности руки и принимая участие в сценариях работы внешней системы управления, таких как блокировка системы, удержание фиксированного положения, обратная связь.
Контроллер кисти позволяет реализовывать сложные прецеденты использования, такие как: блокировка управления, удержание положения, обратная связь за счет наличия двигателей.
Применение бесколлекторных двигателей постоянного тока дает возможность уменьшить габариты.
Принцип удержания ручки как предмета позволяет всегда понимать и предсказывать, какое движение будет произведено.
Отсутствие механических пружин и использование двигателя с энкодером позволяет реализовать электронный упругий механизм множеством персональных для оператора регулируемых параметров, таких как жесткость, время возврата в исходное состояние. Появляется возможность блокировки захватывающей степени свободы в произвольном положении подвижного элемента.
Использование наматываемого шлейфа в качестве устройства передачи энергии на вращающиеся узлы позволяет повысить надежность системы, не создавая ограничений степеней свободы, превышающих требуемые.
В то время как изобретение было описано в определенных примерах и показано на сопровождающих чертежах, следует понимать, что подобные воплощения являются единственно иллюстративными и не ограничивают широту изобретения, и что это изобретение не ограничивается показанными и описанными определенными конструкциями и системами, поскольку могут иметь место различные другие модификации, понятные для обычных специалистов этой области.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| ТЕНЗОПЛАТФОРМА ДЛЯ РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2715400C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
Изобретение относится к медицинской технике. Контроллер кисти (100) для контроллера оператора управления роботохирургическим комплексом включает рукоятку с пальцевыми схватами (110) и блок управления контроллера кисти. Рукоятка имеет корпус (120) вытянутой эргономичной формы и функционально сконфигурирована для обеспечения функции вращения хирургического инструмента вокруг одной оси. Корпус в верхней части (121) имеет основание (130) с площадкой для крепления к элементу, входящему в состав контроллера оператора, который обеспечивает функцию управления вращения манипулятора с хирургическим инструментом и/или отклонения хирургического инструмента от его продольной оси. Площадка основания функционально сконфигурирована для передачи электрических сигналов. Блок управления расположен внутри корпуса элемента контроллера оператора, закрепленного на площадке основания. Пальцевые схваты являются подвижным и выполнены с возможностью вращения вокруг собственной оси, совпадающей с продольной осью (123) рукоятки, в сагиттальной плоскости для обеспечения функции замыкания или размыкания браншей хирургического инструмента. Внутри корпуса рукоятки расположены на одной оси механизмы поворота рукоятки и пальцевых схватов. Датчик механизма поворота рукоятки обеспечивает электрические сигналы, соответствующие изменению положения корпуса рукоятки при отклонении кисти оператора в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости, и передает их блоку управления контроллера кисти через площадку основания корпуса рукоятки. Датчик механизма поворота пальцевых схватов обеспечивает электрические сигналы, соответствующие изменению положения пальцевых схватов при перемещении пальцев оператора в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости, и передает их блоку управления контроллера кисти через площадку основания корпуса рукоятки. Блок управления контроллера кисти сконфигурирован для передачи движения рукоятки и/или пальцевых схватов в соответствующее движение хирургического инструмента и для передачи движения хирургического инструмента в соответствующее движение рукоятки и/или пальцевых схватов. Достигается сокращение нагрузки на руку оператора, повышение точности определения положения руки и увеличение диапазона перемещения рук с обеспечением обратной связи, тактильных ощущений и мобильности за счет использования предлагаемой архитектуры контроллера кисти, что сводит к минимуму ограничения на способность хирурга манипулировать хирургическим инструментом. 5 з.п. ф-лы, 11 ил.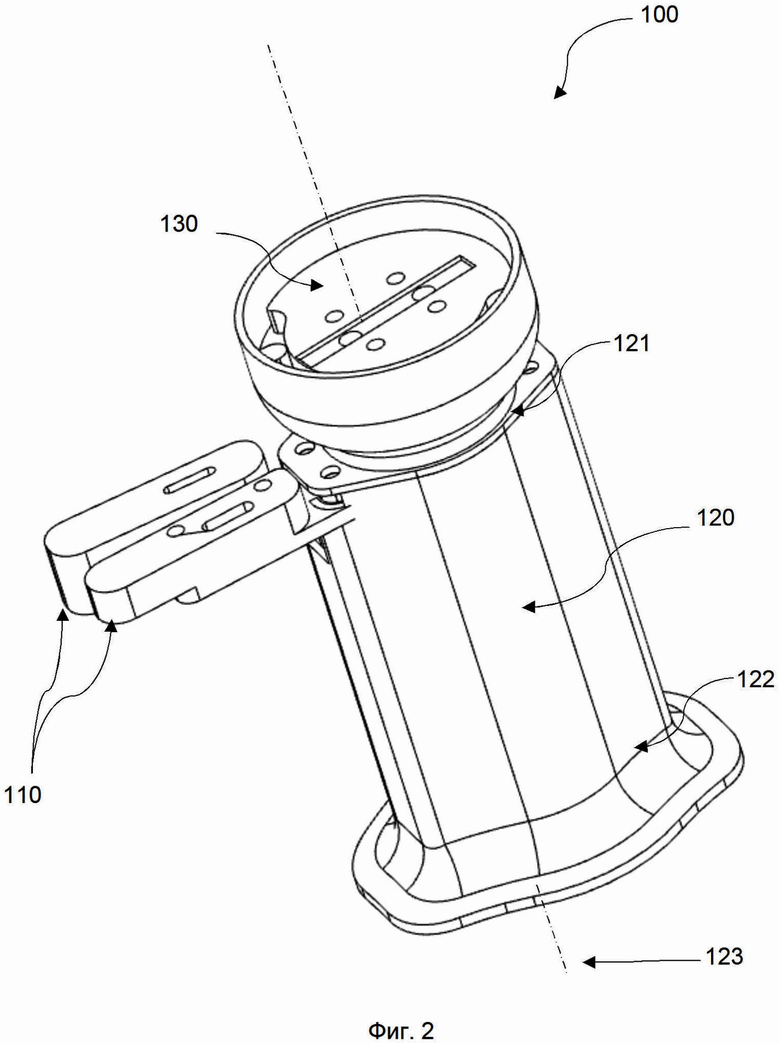
1. Контроллер кисти для контроллера оператора управления роботохирургическим комплексом, включающий
рукоятку с пальцевыми схватами и блок управления контроллера кисти;
причем рукоятка имеет корпус вытянутой эргономичной формы, охватываемый и удерживаемый всей поверхностью кисти оператора во время работы, рукоятка функционально сконфигурирована для обеспечения функции вращения хирургического инструмента вокруг одной оси;
при этом корпус рукоятки в верхней части имеет основание с площадкой для крепления к элементу, входящему в состав контроллера оператора, который обеспечивает функцию управления вращением манипулятора с хирургическим инструментом и/или отклонением хирургического инструмента от его продольной оси;
причем площадка основания функционально сконфигурирована для передачи электрических сигналов;
причем блок управления контроллера кисти расположен внутри корпуса вышеуказанного элемента, входящего в состав контроллера оператора, закрепленного на площадке основания;
причем пальцевые схваты выполнены с возможностью расположения на них пальцев оператора, по меньшей мере один из пальцевых схватов является подвижным и выполнен с возможностью вращения вокруг собственной оси, совпадающей с продольной осью рукоятки, в сагиттальной плоскости для обеспечения функции замыкания или размыкания браншей хирургического инструмента;
при этом внутри корпуса рукоятки расположены на одной оси:
механизм поворота рукоятки, включающий датчик поворота, обеспечивающий электрические сигналы, соответствующие изменению положения корпуса рукоятки при отклонении кисти оператора в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости, и передающий их блоку управления контроллера кисти через площадку основания корпуса рукоятки, и приводной элемент рукоятки,
механизм поворота по меньшей мере одного пальцевого схвата, включающий датчик поворота, обеспечивающий электрические сигналы, соответствующие изменению положения по меньшей мере одного пальцевого схвата при перемещении пальцев оператора в сагиттальной плоскости относительно поперечной оси кисти, лежащей во фронтальной плоскости, и передающий их блоку управления контроллера кисти через площадку основания корпуса рукоятки, и приводной элемент пальцевого схвата;
причем блок управления контроллера кисти функционально сконфигурирован для:
передачи полученных сигналов на цифровой блок контроллера оператора и на внешнюю систему управления роботохирургическим комплексом для передачи движения рукоятки и/или по меньшей мере одного пальцевого схвата в соответствующее движение хирургического инструмента,
получения управляющих сигналов от внешней системы управления роботохирургического комплекса и передачи их на приводной элемент рукоятки и/или приводной элемент по меньшей мере одного пальцевого схвата для передачи движения хирургического инструмента в соответствующее движение рукоятки и/или пальцевых схватов.
2. Контроллер кисти по п.1, характеризующийся тем, что по меньшей мере один пальцевый схват закреплен на корпусе рукоятки.
3. Контроллер кисти по п.1, характеризующийся тем, что корпус рукоятки оснащен световыми, и/или звуковыми, и/или тактильными датчиками, а также датчиками давления.
4. Контроллер кисти по п.1, характеризующийся тем, что корпус рукоятки оснащен датчиком приближения.
5. Контроллер кисти по п.1, характеризующийся тем, что цифровой блок управления контроллера оператора формирует управляющие сигналы через блок управления кисти на приводной элемент рукоятки и/или приводной элемент пальцевого схвата для обеспечения поворота рукоятки и/или подвижного пальцевого схвата в сторону, совпадающую с поворотом кисти и/или подвижного пальцевого схвата, или в сторону, противоположную повороту кисти и/или подвижного пальцевого схвата соответственно.
6. Контроллер кисти по п.1, который оснащен тахометрами, измерителями ускорения и нагрузочными элементами индикации силы.
| WO 2018112227 A2, 21.06.2018 | |||
| KR 101789064 B1, 23.10.2017 | |||
| JP 6000387 B2, 28.09.2016 | |||
| US 2019000574 A1, 03.01.2019 | |||
| US 2015018841 A1, 15.01.2015 | |||
| ПОВОРОТНЫЕ ПРИВОДНЫЕ КОНСТРУКЦИИ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2640002C2 |

