Изобретение относится к электроизмерительной технике и автоматике и может быть использовано в системах электродистанционного управления перемещением подвижных объектов (автомобилей, тракторов, летательных аппаратов, подводных и надводных кораблей).
Известен двухкоординатный преобразователь угловых перемещений, содержащий диэлектрический каркас, сферический шарнир, выполненный в виде электропроводящего шара, расположенного эксцентрично внутри полой диэлектрической полусферы, вихретоковые датчики зазоров [1].
Недостатками известного устройства являются сложность изготовления полой тонкостенной диэлектрической полусферы и возможность проворота сферического шарнира вокруг вертикальной оси, что ухудшает эргономические характеристики управления подвижными объектами.
Наиболее близким по технической сущности к заявляемому устройству является выбранный в качестве прототипа двухкоординатный преобразователь угловых перемещений [2], содержащий разъемный диэлектрический корпус с шарообразной полостью и секторным вырезом, размещенный в полости сферический шарнир, выполненный в виде примыкающих один к другому электропроводящих усеченного шарообразного элемента и сегментного участка второго шарообразного элемента, центры которых смещены на величину "а", управляющую рукоятку связи шарнира с контролируемым объектом и вихретоковый датчик зазоров, выполненный в виде электронного блока и подключенных к нему четырех идентичных катушек индуктивности, установленных попарно диаметрально противоположно в диэлектрическом корпусе симметрично относительно центра его полости.
Этот преобразователь проще в изготовлении, чем аналог, но и у него остается возможность проворота сферического шарнира вокруг оси рукоятки связи шарнира с управляющим объектом. Этот недостаток является типовым и для других аналогичных преобразователей со сферическими подвижными элементами [3, 4, 5, 6, 7].
В основу предлагаемого изобретения поставлена задача улучшения эргономических характеристик и повышения надежности управления за счет устранения возможности проворота сферического подвижного элемента и связанной с ним рукоятки связи с управляющим объектом вокруг своей оси.
Указанная задача решается за счет того, что в двухкоординатном преобразователе угловых перемещений, содержащем разъемный диэлектрический корпус со сферической полостью и секторным вырезом с центральным углом γ , вихретоковый датчик зазоров, выполненный в виде электронного блока и подключенных к нему четырех идентичных катушек индуктивности, установленных попарно диаметрально противоположно в диэлектрическом корпусе симметрично относительно центра его полости, размещенный в полости сферический шарнир, выполненный в виде примыкающих один к другому электропроводящих усеченного первого шарообразного элемента и сегментного участка второго шарообразного элемента, центры которых смещены, жестко связанную со сферическим шарниром и расположенную в секторном вырезе корпуса рукоятку связи с управляющим объектом, в первом шарообразном элементе, со стороны, противоположной второму шарообразному элементу, выполнена цилиндрическая полость, ось которой совпадает с осью рукоятки связи с управляющим объектом, а в плоском дне цилиндрической полости, которое расположено в плоскости большого круга сферической поверхности второго шарообразного элемента, симметрично относительно его центра, выполнен паз, поверхность которого имеет форму поверхности полуцилиндра, ось которого находится в плоскости дна цилиндрической полости и параллельна поперечной оси преобразователя, в паз вставлен подвижный сухарь полуцилиндрической формы, на плоской прямоугольной поверхности которого симметрично относительно центра этой поверхности выполнена канавка, поверхность которой имеет форму поверхности полуцилиндра, ось которого расположена в плоскости прямоугольной наружной поверхности подвижного сухаря и перпендикулярна оси его наружной полуцилиндрической поверхности, в канавку подвижного сухаря вставлена полуцилиндрическая часть опорного элемента закрепленного в полости корпуса, в сферический шарнир, подвижный сухарь и опорный элемент имеют возможность свободного взаимного скольжения по полуцилиндрическим поверхностям их сопряжений, кроме того, радиус наружной полуцилиндрической поверхности подвижного сухаря Rц = 0,5 • R1 • cos γ , где R1 - радиус сферической поверхности первого шарообразного элемента, длина подвижного сухаря равна 2Rц, радиус полуцилиндрической поверхности канавки в подвижном сухаре равен 0,8 • Rц, а длина этой канавки не более 0,5 • Rц, диаметр цилиндрической полости в первом шарообразном элементе равен
где Rк - радиус катушки индуктивности, а диаметр опорной части опорного элемента не превышает диаметра катушки индуктивности.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых элементов: подвижного сухаря полуцилиндрической формы с канавкой, поверхность которой имеет форму поверхности полуцилиндра, на плоской прямоугольной поверхности и взаимоперпендикулярными осями двух своих полуцилиндрических поверхностей и опорного элемента с полуцилиндрической и опорными частями, причем наружные размеры полуцилиндрической части опорного элемента совпадают с соответствующими внутренними размерами канавки в подвижном сухаре, а также тем, что в сферическом шарнире выполнена цилиндрическая полость, на плоском дне которой имеется паз, поверхность которого имеет форму поверхности полуцилиндра, внутренние размеры которого совпадают с соответствующими наружными размерами подвижного сухаря, и связями этих элементов с остальными элементами преобразователя.
На фиг. 1 показан фронтальный разрез двухкоординатного преобразователя угловых перемещений. На фиг. 2 показано сечение двухкоординатного преобразователя угловых перемещений по А-А. На фиг. 3 показано аксонометрическое изображение подвижного сухаря. На фиг. 4 показана блок-схема вихретокового датчика зазоров.
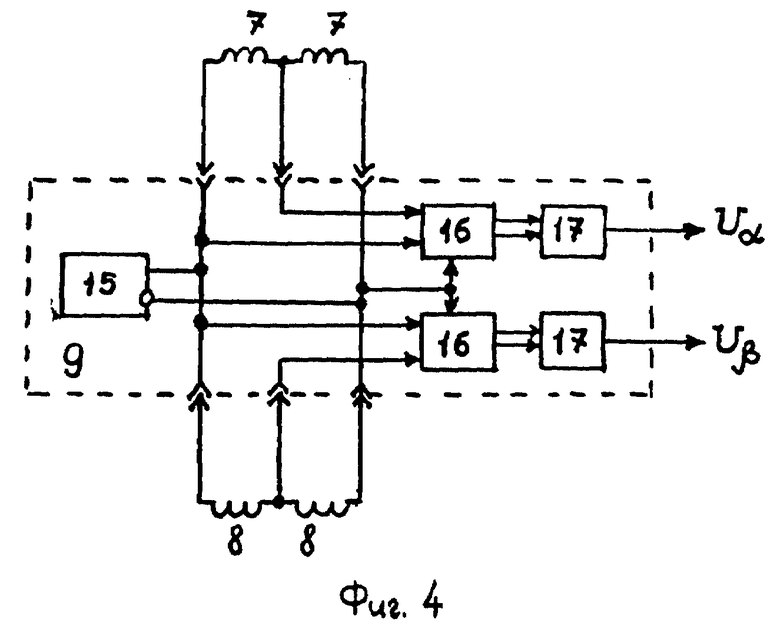
Двухкоординатный преобразователь угловых перемещений (фиг. 1, 2) содержит разъемный диэлектрический корпус 1 со сферической полостью в нем и секторным вырезом 2. В полости корпуса размещен сферический шарнир 3 с рукояткой 4 в виде управляющего элемента для связи с управляющим объектом. Рукоятка 4 имеет возможность перемещения в секторном вырезе корпуса 1. Сферический шарнир 3 выполнен в виде электропроводящих усеченного шарообразного элемента 5 радиуса R1 и сегмента второго шарообразного элемента 6 с радиусом R2 = (R1 + a), примыкающего к элементу 5. Центры элементов 5 и 6 смещены на величину "a". В корпусе 1 преобразователя размещены катушки 7, 8 индуктивности вихретокового датчика зазоров, соединенные с электронным блоком 9. Катушки 7 индуктивности установлены диаметрально противоположно и симметрично относительно центра полости корпуса 1, а ось этих двух катушек расположена в плоскости большого круга полости корпуса 1 параллельно продольной оси преобразователя. Катушки 8 индуктивности (фиг. 2) расположены и соединены аналогично катушкам 7, но ось катушек 8 перпендикулярна оси катушек 7 и параллельна поперечной оси преобразователя. Высота H сегментного участка элемента 6 сферического шарнира 3 должна удовлетворять условию H ≤ R1(1 - sin γ ) - Rк, где γ - центральный угол секторного выреза в корпусе, равный предельному возможному углу отклонения рукоятки 4 от нейтрального положения, Rк - радиус катушки 7, 8 индуктивности. Элемент 5 сферического шарнира 3 имеет цилиндрическую полость 10 с диаметром ось которой совпадает с осью рукоятки 4, а плоское дно совпадает с плоскостью большого круга полости корпуса 1 при нейтральном положении рукоятки 4. В плоском дне полости 10 симметрично относительно центра ее дна выполнен паз, поверхность которого имеет форму поверхности полуцилиндра, в котором находится подвижный сухарь 11, форма и наружные размеры которого совпадают с соответствующими формой и размерами паза в плоском дне полости 10. Радиус наружной полуцилиндрической поверхности подвижного сухаря 11 равен Rц = 0,5 • R1 • cos γ, а длина равна 2Rц. Ось полуцилиндрической поверхности подвижного сухаря 11 находится в плоскости большого круга полости корпуса 1, параллельна поперечной оси преобразователя и совпадает с осью катушек 8 индуктивности. В прямоугольной плоскости подвижного сухаря 11 симметрично относительно ее центра выполнена канавка, поверхность которой имеет форму поверхности полуцилиндра. В этой канавке находится полуцилиндрическая часть 12 опорного элемента 13, закрепленного на внутренней поверхности полости корпуса 1. Форма и наружные размеры полуцилиндрической части 12 опорного элемента 13 совпадают с соответствующими формой и размерами канавки в подвижной сухаре 11. Радиус полуцилиндрической поверхности части 12 опорного элемента 13 равен 0,8 • Rц, а ширина не более 0,5 • Rц. Диаметр опорной части 14 опорного элемента 13 не должен превышать диаметра катушек 7, 8 индуктивности. Выводы каждой пары катушек 7, 8 индуктивности соединены с соответствующими входами электронного блока 9, вместе с которым катушки 7, 8 индуктивности образуют вихретоковый датчик зазоров (фиг. 4). Вихретоковый датчик зазоров изготовлен по известной схеме и в его качестве может быть использован либо серийно выпускаемый датчик (например, типов ТПН, ТПК) [8], либо изготовленный по схеме вихретокового измерителя, описанного в [1]. Последний вариант вихретокового датчика зазоров (фиг. 4) содержит генератор импульсов 15, к выходам которого подключены последовательно соединенные пары катушек 7, 8 индуктивности и управляющие входы двух синхронных детекторов 16, а выходы последних через дифференциальные усилители постоянного тока 17 соединены с выходами преобразователя, сигнальные же входы синхронных детекторов 16 соединены со средними точками каждой пары катушек 7, 8 индуктивности.
ось которой совпадает с осью рукоятки 4, а плоское дно совпадает с плоскостью большого круга полости корпуса 1 при нейтральном положении рукоятки 4. В плоском дне полости 10 симметрично относительно центра ее дна выполнен паз, поверхность которого имеет форму поверхности полуцилиндра, в котором находится подвижный сухарь 11, форма и наружные размеры которого совпадают с соответствующими формой и размерами паза в плоском дне полости 10. Радиус наружной полуцилиндрической поверхности подвижного сухаря 11 равен Rц = 0,5 • R1 • cos γ, а длина равна 2Rц. Ось полуцилиндрической поверхности подвижного сухаря 11 находится в плоскости большого круга полости корпуса 1, параллельна поперечной оси преобразователя и совпадает с осью катушек 8 индуктивности. В прямоугольной плоскости подвижного сухаря 11 симметрично относительно ее центра выполнена канавка, поверхность которой имеет форму поверхности полуцилиндра. В этой канавке находится полуцилиндрическая часть 12 опорного элемента 13, закрепленного на внутренней поверхности полости корпуса 1. Форма и наружные размеры полуцилиндрической части 12 опорного элемента 13 совпадают с соответствующими формой и размерами канавки в подвижной сухаре 11. Радиус полуцилиндрической поверхности части 12 опорного элемента 13 равен 0,8 • Rц, а ширина не более 0,5 • Rц. Диаметр опорной части 14 опорного элемента 13 не должен превышать диаметра катушек 7, 8 индуктивности. Выводы каждой пары катушек 7, 8 индуктивности соединены с соответствующими входами электронного блока 9, вместе с которым катушки 7, 8 индуктивности образуют вихретоковый датчик зазоров (фиг. 4). Вихретоковый датчик зазоров изготовлен по известной схеме и в его качестве может быть использован либо серийно выпускаемый датчик (например, типов ТПН, ТПК) [8], либо изготовленный по схеме вихретокового измерителя, описанного в [1]. Последний вариант вихретокового датчика зазоров (фиг. 4) содержит генератор импульсов 15, к выходам которого подключены последовательно соединенные пары катушек 7, 8 индуктивности и управляющие входы двух синхронных детекторов 16, а выходы последних через дифференциальные усилители постоянного тока 17 соединены с выходами преобразователя, сигнальные же входы синхронных детекторов 16 соединены со средними точками каждой пары катушек 7, 8 индуктивности.
Двухкоординатный преобразователь угловых перемещений работает следующим образом.
В исходном состоянии сферический шарнир 3 занимает такое положение, при котором рукоятка 4 находится в центре секторного выреза 2. В этом нейтральном положении зазоры между поверхностью шарообразного элемента 5 сферического шарнира 3 и всеми катушками 7, 8 индуктивности одинаковы, вследствие чего электронный блок 9 формирует нулевые выходные напряжения Uα и Uβ.
При отклонении рукоятки 4 от исходного (нейтрального) положения на углы α и β в двух взаимно перпендикулярных плоскостях, диаметрально расположенные катушки 7, 8 индуктивности будут находиться на различных расстояниях от поверхности шарообразного элемента 5 сферического шарнира 3, что приводит к формированию на выходах электронного блока 9 отличных от нуля выходных напряжений Uα и Uβ, пропорциональных соответственно углам α и β перемещения рукоятки 4. Пропорциональные углам α и β соответствующие напряжения Uα и Uβ формируются до значений /α/ = γ и /β/ = γ. Угол γ определяет диапазон угловых перемещений, преобразуемых преобразователем.
Вихретоковый датчик зазоров работает следующим образом (фиг. 4). Генератор импульсов 15 формирует две противофазные последовательности симметричных прямоугольных импульсов напряжения. Два противофазных выхода генератора импульсов 15 и две пары последовательно соединенных катушек 7, 8 индуктивности образуют две мостовые электрические цепи переменного тока. При равенстве сопротивлений катушек 7 напряжение в узле их соединения равно нулю. При приближении электропроводящей поверхности с катушкам 7 в электропроводящей поверхности будут создаваться вихревые токи, формирующие в возбуждающих их катушках индуктивности вносимые сопротивления. Величина вносимого сопротивления зависит от зазора между катушкой индуктивности, возбуждающей вихревой ток, и электропроводящей поверхностью, в которой вихревой ток возбуждается. Если расстояние от катушек 7 до поверхности шарообразного элемента 5 сферического шарнира 3 одинаково, то вносимые сопротивления в обеих катушках 7 одинаковы, мостовая цепь сбалансирована и на сигнальном входе соответствующего синхронного детектора 16 действует нулевое напряжение. Если расстояние от катушек 7 до поверхности шарообразного элемента 5 не одинаково, то вносимые сопротивления в обеих катушках 7 не одинаковы, мостовая цепь, содержащая катушки 7, разбалансирована и на сигнальном входе соответствующего синхронного детектора 16 будет действовать напряжение, пропорциональное разности зазоров между двумя катушками 7 и поверхностью шарообразного элемента 5. Аналогичным образом действуют и катушки 8, реагирующие на разницу зазоров в плоскости, перпендикулярной той, в которой реагируют катушки 7. Выходные сигналы синхронных детекторов 16 пропорциональны соответствующим угловым перемещениям α, β рукоятки 4 относительно исходного положения. Эти выходные сигналы усиливаются в усилителях 17 и поступают на соответствующие выходы преобразователя.
Шарообразный элемент 5, подвижный сухарь 11 и полуцилиндрическая часть 12 опорного элемента 13 образуют двухкоординатную опору, имеющую возможность поворота по двум взаимно ортогональным направлениям, но не имеющую возможность проворота вокруг третьей оси ортогональной к двум предыдущим. Шарообразный элемент 5 может поворачиваться относительно корпуса 1, скользя по полуцилиндрической поверхности сопряжения своего паза и подвижного сухаря 11 вокруг оси наружной полуцилиндрической поверхности подвижного сухаря 11. Эта ось параллельна поперечной оси преобразователя (перпендикулярна плоскости фиг. 1). Шарообразный элемент 5 вместе с подвижным сухарем 11 могут совместно поворачиваться относительно корпуса 1, скользя по полуцилиндрической поверхности сопряжения канавки в подвижном сухаре 11 и полуцилиндрической части 12 опорного элемента 13 вокруг оси внутренней полуцилиндрической поверхности канавки в подвижном сухаре 11. Эта ось параллельна продольной оси преобразователя (находится в плоскости фиг. 1). Повороту рукоятки 4 вокруг своей оси препятствуют торцевые полукруглые плоскости подвижного сухаря 11, полуцилиндрической части 12 опорного элемента 13 и соответствующие полукруглые плоские участки паза в шарообразном элементе 5 и канавки в подвижном сухаре 11.
Таким образом, предлагаемое техническое решение обеспечивает достижение поставленной задачи - улучшение эргономических характеристик управления за счет устранения возможности проворота ручки 4 вокруг своей оси. Улучшение эргономических характеристик управления приводит к повышению надежности управления транспортными средствами, что особенно важно для авиационной и морской техники. Повышение надежности управления происходит за счет устранения следующих причин, вызывающих ошибки управления:
1) проворот ручки управления вокруг своей оси создает у оператора ложное ощущение возможности поворота транспортного средства за счет вращения ручки управления вокруг своей оси;
2) проворот ручки управления порождает у оператора чувство неуверенности в системе управления из-за паразитных поворотов ручки управления при выполнении маневровых операций управления, в особенности при одновременно смещении ручки управления по углам α и β ;
3) при установке на ручку управления дополнительных органов управления (кнопок и т.д.) их ориентация относительно оператора изменяется при провороте ручки относительно своей оси, что приводит к подаче ложного сигнала управления через дополнительный орган управления (ложное нажатие на кнопку, оказавшуюся не на привычном месте).
Таким образом, предлагаемое решение обладает по сравнению с прототипом большей надежностью в управлении.
Источники информации
1. А.с. СССР 1379608, G 01 B 7/30, 1988.
2. А.с. СССР 1486769, G 01 B 7/30, 1989.
3. А.с. СССР 1420355, G 01 B 7/30, 1988.
4. А.с. СССР 1472753, G 01 B 7/30, 1989.
5. А.с. СССР 1486770, G 01 B 7/30, 1989.
6. А.с. СССР 1504494, G 01 B 7/30, 1989.
7. А.с. СССР 1670377, G 01 B 7/30, 1991.
8. Приборы для неразрушающего контроля материалов и изделий. Справочник под ред. В.В. Клюева. М.: Машиностроение, 1986, с. 134, 148.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2262072C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2077025C1 |
| Преобразователь перемещений | 1991 |
|
SU1779907A1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ МЕТАЛЛИЧЕСКИХ ТЕЛ В СЛАБОПРОВОДЯЩИХ СРЕДАХ | 2000 |
|
RU2193189C2 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ | 2000 |
|
RU2190866C2 |
| ВИХРЕТОКОВОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2044312C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОСТРАНСТВЕННЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2045000C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННЫХ ПЕРЕМЕЩЕНИЙ | 1992 |
|
RU2032882C1 |
| Двухкоординатный преобразователь угловых перемещений | 1989 |
|
SU1670377A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОЛЕБАНИЙ ЛОПАТОК ВРАЩАЮЩЕГОСЯ КОЛЕСА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207523C1 |
Изобретение может быть использовано в системах управления перемещением подвижных объектов. Преобразователь содержит корпус, сферический шарнир и вихретоковый датчик зазоров. Сферический шарнир имеет подвижный элемент из двух смещенных шарообразных электропроводящих частей. Новым в преобразователе является наличие в сферическом подвижном элементе цилиндрической полости. В дне полости выполнен полуцилиндрический паз. В полуцилиндрическом пазе находится полуцилиндрический подвижный сухарь. В центре прямоугольной плоской поверхности сухаря выполнена полуцилиндрическая канавка. В канавке располагается полуцилиндрическая часть опорного элемента, закрепленного в полости корпуса. За счет устранения возможности поворота сферического подвижного элемента и связанной с ним рукоятки вокруг своей оси улучшаются эргономические характеристики преобразователя и повышается надежность управления. 2 з. п.ф-лы, 4 ил.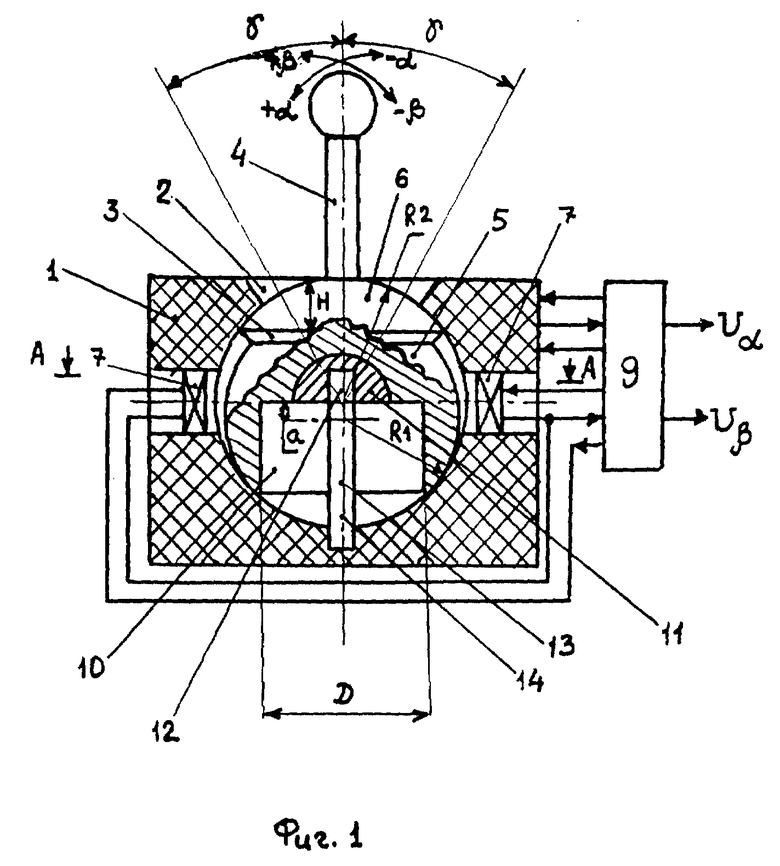
Rц= 0,5•R1•cosγ,
где R1 - радиус сферической поверхности первого шарообразного элемента,
длина подвижного сухаря равна 2Rц, радиус полуцилиндрической поверхности канавки в подвижном сухаре равен 0,8Rц, а длина этой канавки не боле 0,5Rц.
где R1 - радиус сферической поверхности первого шарообразного элемента;
Rк - радиус катушки индуктивности,
а диаметр опорной части опорного элемента не превышает диаметра катушки индуктивности.
| SU 1486769 A1, 15.06.89 | |||
| Двухкоординатный преобразователь угловых перемещений | 1987 |
|
SU1472753A1 |
| Двухкоординатный преобразователь | 1987 |
|
SU1420355A1 |
| Двухкоординатный преобразователь угловых перемещений | 1986 |
|
SU1379608A1 |
| DE 3722046 C1, 10.11.88 | |||
| US 5559432 A, 24.09.96. | |||
