Область техники
Изобретение относится к рабочему инструмент с двигателем и управляющим устройством вида, указанного в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Для таких рабочих инструментов, как, например триммеры или другие аналогичные, в некоторых случаях применения желательно приводить в движение рабочий инструмент при постоянном числе оборотов, уменьшенном по сравнению с максимальным числом оборотов, чтобы достигать желаемого результата при резании. Из патентного документа ЕР 1223318 В1 и US 5765445 А известен регулируемый промежуточный упор для рычага управления акселератором, при помощи которого пользователь имеет возможность легко удерживать рычаг управления акселератором в частично включенном положении. Промежуточный упор включает в себя пружину. После достижения промежуточного упора возможно дальнейшее воздействие на рычаг управления акселератором с преодолением силы упругости. Для этого требуется приложение значительного управляющего усилия. Для удержания рычага управления акселератором, например, в положении максимальной подачи топлива пользователь также должен держать рычаг управления акселератором, преодолевая силу, действующую со стороны пружины промежуточного упора. Вследствие этого работа с числом оборотов, превышающим заданное для промежуточного упора, утомительна для пользователя.
Раскрытие изобретения
В основе изобретения лежит задача создания рабочего инструмента обычного вида, на котором возможна работа без усталости также при высоких скоростях вращения и который облегчает работу при различных уменьшенных числах оборотов.
Эта задача решена рабочим инструментом с признаками пункта 1 формулы изобретения.
Предусмотрено, что после преодоления промежуточного упора при дальнейшем воздействии на орган управления управляющее усилие снова уменьшается. В результате этого для работы при числе оборотов, превышающем то, которое определено промежуточным упором, пользователю не приходится долговременно прилагать усилие, необходимое для преодоления упора, а требуется только намного меньшее управляющее усилие. Это управляющее усилие предпочтительно соответствует обыкновенному приводному усилию органа управления, например, рычага управления акселератором, без соответствующего промежуточного упора. Сила, необходимая для приведения в действие органа управления, как правило, увеличивается линейно с увеличением пути, проходимого при воздействии. При достижении промежуточного упора требуемое усилие предпочтительно резко поднимается относительно этой линейной кривой и после преодоления промежуточного упора снова уменьшается до линейной кривой. Вследствие этого достигается значительная разница в уровнях силы для преодоления промежуточного упора.
На основе положения промежуточного упора регулируется желаемая рабочая точка для рабочего инструмента. При этом регулировка промежуточного упора предпочтительно возможна также во время эксплуатации. В частности, имеется возможность отводить рычаг управления акселератором назад путем перемещения промежуточного упора в направлении меньшего числа оборотов. Благодаря этому возможна точная установка желаемой рабочей точки во время эксплуатации. Регулировка рычага управления акселератором посредством установочного элемента промежуточного упора возможна, если усилие, необходимое для преодоления промежуточного упора, существенно превышает приводное усилие, необходимое до и после достижения промежуточного упора. Поскольку после преодоления промежуточного упора управляющее усилие снова уменьшается и не должно прилагаться пользователем долговременно, имеется возможность установить величину этого усилия, соответствующую преодолению, на достаточно высоком уровне.
Вследствие того, что положение промежуточного упора является регулируемым, легко осуществима работа при различных уменьшенных значениях числа оборотов. Положение установочного элемента предпочтительно регулируется независимо от положения органа управления. При этом возможно расположение установочного элемента на органе управления и регулирование его положения относительно органа управления. Тем не менее, заданное установочным элементом положение для промежуточного упора не зависит от положения органа управления. В предпочтительном случае установочный элемент и орган управления расположены в пространстве отдельно друг от друга.
Управляющее усилие после преодоления промежуточного упора предпочтительно меньше, чем половина, в частности, меньше, чем одна четверть максимального управляющего усилия при преодолении промежуточного упора. Промежуточный упор предпочтительно образован первым упорным элементом, соединенным с органом управления, и вторым упорным элементом, соединенным с корпусом. При этом для регулировки промежуточного упора возможно изменение положения первого упорного элемента относительно органа управления или положение второго упорного элемента относительно корпуса. Упорные элементы предпочтительно выполнены с возможностью перемещения относительно друг друга на протяжении всего управляющего хода органа управления, от нулевого положения до максимального положения. При этом нулевое положение органа управления представляет собой невключенное положение органа управления, а максимальное положение - включение на максимальном уровне. Конструктивно задание максимального положения может представлять собой, например, упор. Соответственно, не орган управления передвигает промежуточный упор, а промежуточный упор преодолевается органом управления, вследствие чего после преодоления промежуточного упора приводное усилие снова может уменьшаться.
В предпочтительном варианте один из упорных элементов представляет собой пружинящий элемент, а другой упорный элемент - упорную поверхность. При преодолении промежуточного упора пружинящий элемент предпочтительно упруго деформируется и перемещается через механический промежуточный упор. После того, как пружинящий элемент передвинут за механический упор, управляющее усилие снова уменьшается. При этом пружинящий элемент предпочтительно выполнен очень жестким, имеет высокий коэффициент жесткости пружины. Вследствие этого простым способом достигается значительное повышение необходимого управляющего усилия на промежуточном упоре. Положение пружинящего элемента предпочтительно является регулируемым. Однако возможно предусмотренное регулирование положения упорной поверхности для установки промежуточного упора.
Упорная поверхность предпочтительно имеет наклон относительно направления движения пружинящего элемента при достижении им упорной поверхности, то есть направления, в котором перемещается пружинящий элемент при достижении упорной поверхности, под углом больше 45°. Угол наклона составляет предпочтительно больше, чем примерно 70°, в частности, от примерно 75° до примерно 85°. В результате промежуточный упор достаточно ощутим для пользователя даже при таком режиме эксплуатации, в котором возможно возникновение значительных вибраций. Вследствие того, что приводное усилие для преодоления промежуточного упора должно прилагаться только очень кратковременно, а затем управляющее усилие снова уменьшается, сравнительно большое управляющее усилие для преодоления промежуточного упора приемлемо.
Исполнение получается простым, если при приведении в действие органа управления пружинящий элемент скользит по поверхности скольжения. Поверхность скольжения предпочтительно имеет первый участок, расположенный в направлении воздействия перед упорной поверхностью, и второй участок, расположенный в направлении воздействия за упорной поверхностью. При этом участок, расположенный - в направлении воздействия - перед упорной поверхностью, представляет собой участок, к которому пружинящий элемент прилегает, когда орган управления находится перед промежуточным упором, а второй участок поверхности скольжения представляет собой участок, к которому пружинящий элемент прилегает, когда промежуточный упор уже пройден. Упорная поверхность предпочтительно образует наклонную направляющую между обоими участками поверхности скольжения. Поэтому при высвобождении органа управления промежуточный упор не ощутим или только немного ощутим, и орган управления после высвобождения возвращается к своему нулевому положению, предпочтительно за счет силы возвратной пружины. При этом поверхности скольжения на первом и на втором участке предпочтительно проходят приблизительно параллельно направлению движения пружинящего элемента. Если пружинящий элемент выполняет линейное движение, то оба участка поверхности скольжения также предпочтительно проходят в виде плоскостей. Если пружинящий элемент перемещается по дугообразной траектории, то поверхность скольжения предпочтительно проходит дугообразно с соответствующим радиусом. При этом направление движения проходит тангенциально относительно поверхности скольжения. Для достижения на втором участке увеличенного управляющего усилия и возвратного усилия предпочтительно предусмотрено, что поверхность скольжения на втором участке проходит под углом относительно направления движения поверхности скольжения. Конструкция получается простой, если поверхность скольжения расположена с возможностью поворота вокруг оси поворота. При этом расстояние от поверхности прилегания пружинящего элемента к поверхности скольжения до оси вращения предпочтительно непрерывно увеличивается при перемещении органа управления в направлении воздействия.
Тонкая регулировка положения промежуточного упора становится возможной, если установочный элемент воздействует на по меньшей мере один из упорных элементов посредством исполнительного механизма. При этом исполнительный механизм представляет собой приводной механизм, который преобразует установочный ход установочного элемента в другой, в частности, значительно меньший установочный ход одного из упорных элементов. Простое оформление получается, если исполнительный механизм включает в себя позиционирующий штифт, который проходит в позиционирующем пазу. При этом позиционирующий паз предпочтительно проходит спиралеобразно. Для перемещения промежуточного упора от позиции рядом с нулевым положением органа управления к позиции рядом с максимальным положением органа управления предпочтительно требуется больше одного оборота установочного элемента. Перемещение промежуточного упора предпочтительно возможно во всей области между нулевым положением и максимальным положением. В частности, возможно бесступенчатое изменение положения промежуточного упора, так что промежуточный упор может устанавливаться в любое положение между нулевым и максимальным положением.
Позиционирующий паз предпочтительно выполнен в установочном элементе, а позиционирующий штифт жестко соединен с одним из упорных элементов. Установочный элемент воздействует, в частности, на второй упорный элемент, который выполнен подвижным в направлении воздействия органа управления для перемещения промежуточного упора. Простая, компактная конструкция достигается, если орган управления расположен с возможностью поворота вокруг оси поворота, и второй упорный элемент для перемещения промежуточного упора выполнен с возможностью поворота вокруг оси поворота органа управления.
Простой монтаж регулируемого промежуточного упора возможен, если корпус представляет собой корпус рукоятки, образованный по меньшей мере двумя чашеобразными элементами, причем орган управления, установочный элемент, исполнительный механизм и упорные элементы помещены в одном общем чашеобразном элементе корпуса рукоятки и зафиксированы в нем. Этот чашеобразный элемент корпуса рукоятки предпочтительно соединен с обыкновенным вторым чашеобразным элементом корпуса рукоятки. В результате этого рабочий инструмент с регулируемым промежуточным упором выполняется идентично рабочему инструменту без регулируемого промежуточного упора во всем, кроме чашеобразного элемента корпуса рукоятки, в котором расположены орган управления, установочный элемент, исполнительный механизм и упорные элементы. Вследствие этого возможно также дооснащение регулируемым промежуточным упором простым способом.
Орган управления предпочтительно представляет собой рычаг управления акселератором, включающий в себя рабочий участок, приводимый в действие пользователем, и крепежный участок, на котором установлен передающий элемент для передачи регулирующего движения рычага управления акселератором на двигатель. Относительное расположение рабочего участка и крепежного участка предпочтительно является регулируемым. Благодаря этому легко осуществима точная установка длины передающего элемента, в частности, троса управления акселератором. На рабочем участке предпочтительно укреплен упорный элемент. Вследствие этого промежуточный упор непосредственно действует на рабочем участке рычага управления акселератором, на который воздействует пользователь.
Орган управления предпочтительно подпружинен по направлению к его нулевому, то есть к невключенному положению. Благодаря этому при высвобождении орган управления возвращается в нулевое положение. Управляющее усилие, которое требуется для перемещения органа управления на определенную величину перемещения, предпочтительно примерно одинаково до достижения промежуточного упора и после преодоления промежуточного упора, то есть в направлении воздействия по обе стороны промежуточного упора. Следовательно, возврат в невключенное положение происходит без дополнительного приложения силы на промежуточном упоре, только за счет обычного натяжения пружины управляющего элемента. Однако имеется также возможность предусматривать различную величину управляющего усилия перед достижением промежуточного упора и после его преодоления. При этом управляющее усилие, необходимое для перемещения органа управления на величину перемещения до достижения промежуточного упора, предпочтительно меньше, чем после преодоления промежуточного упора. Соответственно, сила, действующая на орган управления для его перемещения, после преодоления промежуточного упора больше, чем перед достижением промежуточного упора. Следовательно, после преодоления промежуточного упора требуется большее усилие для перемещения органа управления по направлению к его полностью включенному положению. Благодаря этому достижение и преодоление промежуточного упора становятся более ощутимым для пользователя.
Краткое описание чертежей
Ниже варианты осуществления изобретения разъясняются в дальнейшем на основе чертежа. На нем показаны:
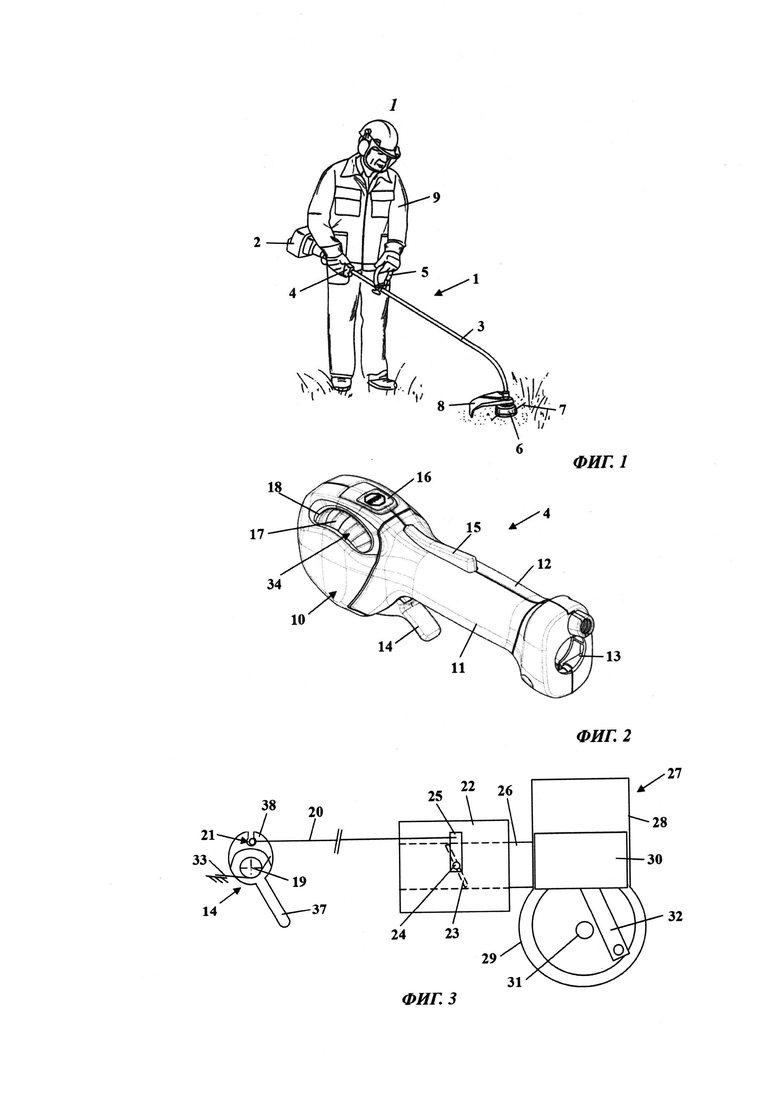
фиг.1 схематичное изображение триммера, направляемого пользователем,
фиг.2 рукоятка триммера с фиг.1 в аксонометрическом изображении,
фиг.3 схематичное изображение управляющего устройства и приводного двигателя триммера,
фиг.4 разрез рукоятки в области рычага управления акселератором в нулевом положении рычага управления акселератором,
фиг.5 увеличенный фрагмент фиг.4,
фиг.6 изображение разреза с фиг.4 с рычагом управления акселератором, находящимся у промежуточного упора,
фиг.7 изображение разреза с фиг.4 в максимальном положении рычага управления акселератором,
фиг.8 диаграмма, которая схематично показывает ход изменения управляющего усилия на протяжении пути перемещения при воздействии,
фиг.9 и 10 аксонометрические изображения удерживающего элемента рабочего инструмента,
фиг.11 и 12 аксонометрические изображения установочного элемента рабочего инструмента,
фиг.13 изображение разреза с фиг.4 с промежуточным упором, находящимся рядом с максимальным положением,
фиг.14 изображение разреза с фиг.4 с промежуточным упором, находящимся рядом с нулевым положением,
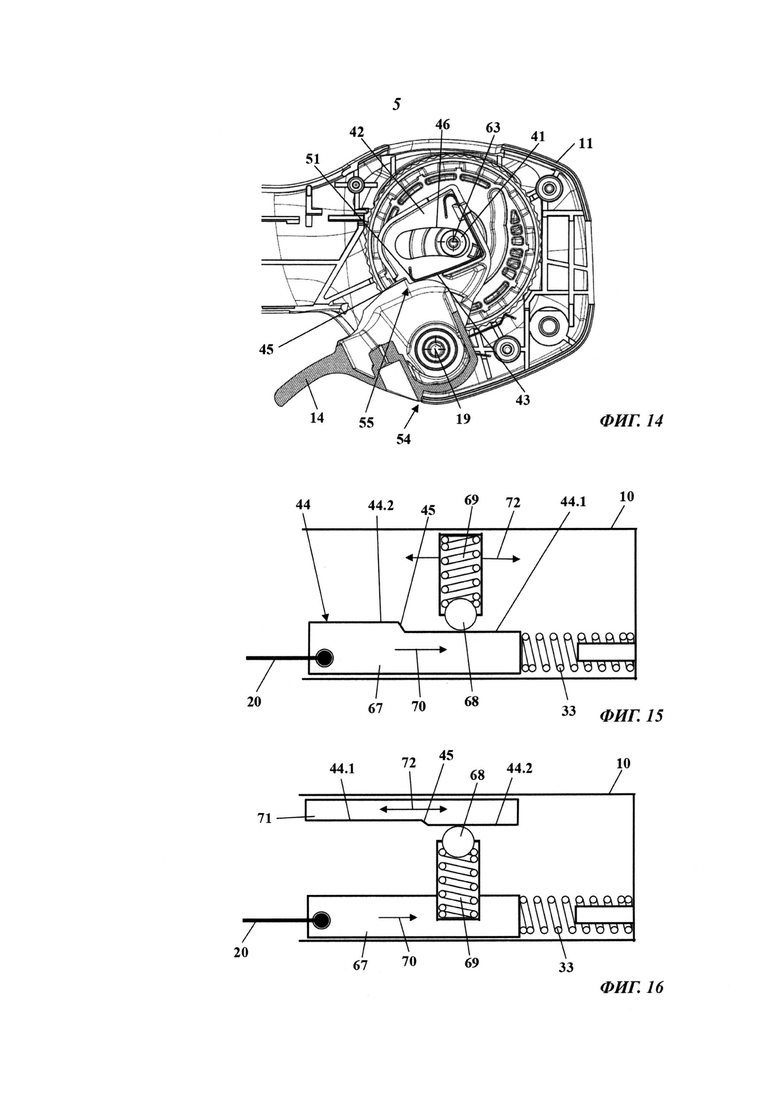
фиг.15 и 16 схематичные изображения вариантов осуществления управляющего устройства,
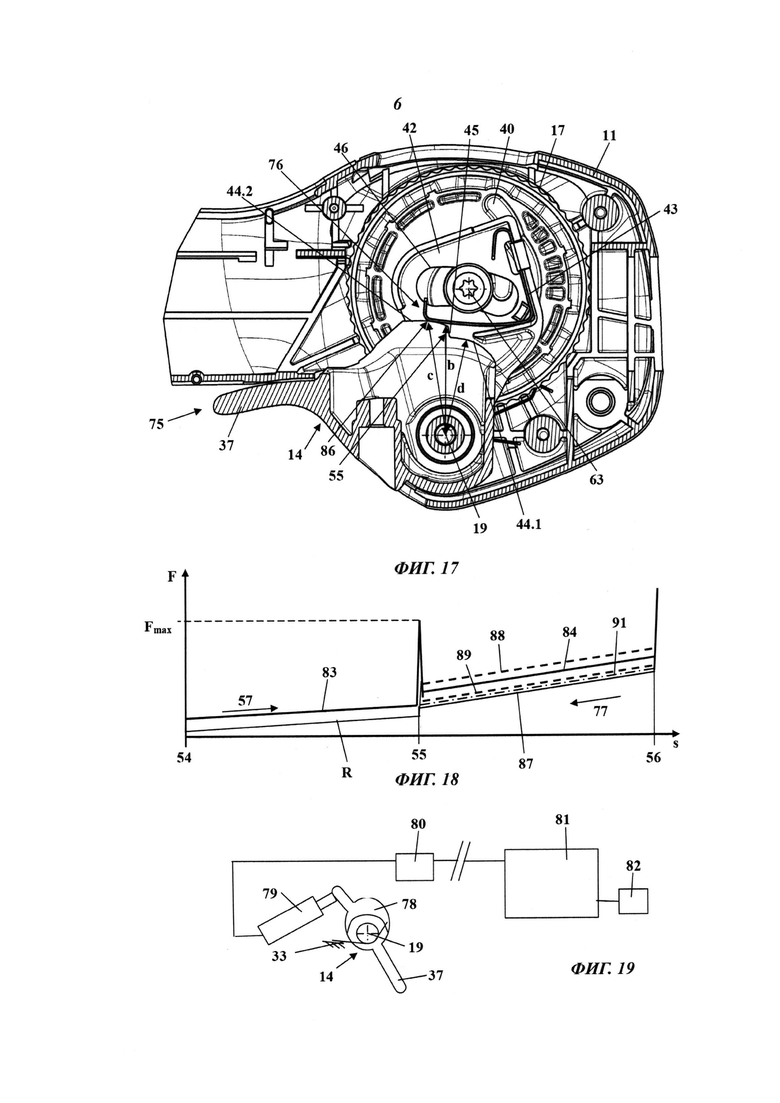
фиг.17 изображение в разрезе варианта осуществления рукоятки в области рычага управления акселератором в максимальном положении рычага управления акселератором,
фиг.18 диаграмма, которая схематично показывает ход изменения управляющего усилия на протяжении пути перемещения для варианта осуществления согласно фиг.17,
фиг.19 схематичное изображение варианта осуществления управляющего устройства и приводного двигателя триммера,
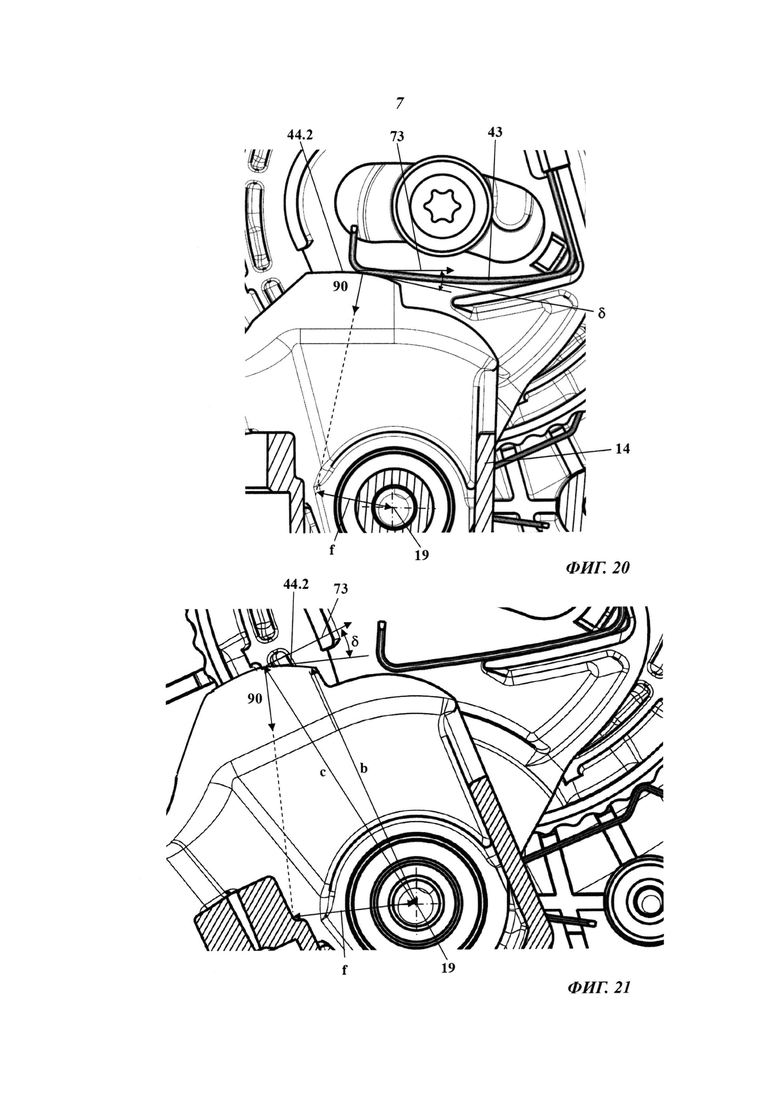
фиг.20 увеличенный фрагмент фиг.20,
фиг.21 еще один вариант осуществления рукоятки, изображенный в разрезе, соответствующем фиг.5.
Осуществление изобретения
На фиг.1 в качестве варианта осуществления рабочего инструмента показан рабочий инструмент, направляемый вручную, а именно триммер 1. Однако предпочтительное использование описываемого ниже исполнения промежуточного упора возможно также в других рабочих инструментах, в частности, в других рабочих инструментах, направляемых вручную, в частности, в устройствах для распыления, устройствах нагнетания, секаторах, инструментах для сбора олив или в других аналогичных. В устройствах нагнетания и устройствах для распыления рабочим органом является рабочее колесо, транспортирующее рабочий поток технологического воздуха. В устройствах для сбора урожая, таких, как инструменты для сбора олив, или других аналогичных, рабочий орган представляет собой подвижный палец, крюк или иной аналогичный элемент, воздействующий на дерево или куст.
Триммер 1 имеет корпус 2 двигателя, в котором расположен не показанный на фиг.1 двигатель. Корпус двигателя 2 посредством направляющей трубы 3 соединен с головкой 6 косилки, из которой выступает режущая нить 7. Головка 6 косилки приводится во вращательное движение. Окружность, описываемая концом режущей нити 7, частично закрыта защитой 8. На направляющей трубе 3 укреплены рукоятка 4 и скоба-рукоятка 5, за которые пользователь 9 держит и направляет триммер 1. Направляющая труба 3 проходит сквозь рукоятку 4. Вместо рукоятки 4 и скобы-рукоятки 5 возможно крепление на направляющей трубе 3 направляющего захвата, а рукоятка 4 может быть насажена на один из концов направляющего захвата.
На фиг.2 отдельно показана рукоятка 4. Рукоятка 4 составлена из двух чашеобразных элементов 11 и 12, которые совместно ограничивают отверстие 13 для направляющей трубы 3. Чашеобразные элементы 11 и 12 соединены друг с другом в плоскости разделения, которая проходит в направлении вдоль направляющей трубы 3. Чашеобразные элементы 11 и 12 вместе образуют корпус 10 рукоятки. В корпусе 10 рукоятки помещен с возможностью поворота рычаг 14 управления акселератором. На противоположной рычагу 14 управления акселератором стороне корпуса 10 рукоятки из корпуса 10 рукоятки выступает блокиратор 15 рычага управления акселератором, который также помещен на корпусе 10 рукоятки с возможностью поворота. Рукоятка 4 имеет выключатель 16 для остановки, а также установочный элемент 17. Рядом с выключателем 16 для остановки в корпусе 10 рукоятки имеется выемка 18, которая освобождает доступ к расположенному в корпусе 10 рукоятки установочному элементу 17, так что пользователь 9 имеет возможность воздействовать на него. Установочный элемент 17 имеет рифление 34, которое делает возможным простое перемещение установочного элемента 17. Возможна и другая предпочтительная структура поверхности установочного элемента 17.
Как схематично показано на фиг.3, рычаг 14 управления акселератором имеет рабочий участок 37 и участок 38 крепления. Оба участка 37 и 38 выполнены с возможностью поворота вокруг одной и той же оси 19 поворота. На рабочем участке 37 действует возвратная пружина 33, которая возвращает рабочий участок 37 и вместе с ним также участок 38 крепления в нулевое положение, если пользователь 9 не воздействует на рабочий участок 37.
На участке 38 крепления выполнено приемное устройство 21 для троса 20 управления акселератором, на котором подвешен трос 20 управления акселератором. Оба участка 37 и 38 рычага 14 управления акселератором подвижны относительно друг друга, чтобы имелась возможность устанавливать длину троса 20 управления акселератором.
Как показано на фиг.3, двигатель выполнен как двигатель 27 внутреннего сгорания, в частности, как одноцилиндровый двигатель. Двигатель 27 внутреннего сгорания предпочтительно представляет собой двухтактный двигатель или смазываемый рабочей смесью четырехтактный ДВС. Однако двигатель может представлять собой также электродвигатель, который, в частности, снабжается энергией посредством электрического кабеля, батареи или аккумулятора. Двигатель 27 внутреннего сгорания имеет цилиндр 28, в котором помещен поршень 30, совершающий возвратно-поступательное движение. Поршень 30 посредством шатуна 32 приводит во вращательное движение коленчатый вал 31, помещенный с возможностью поворота в картере 29 двигателя. Коленчатый вал 31 приводит в действие рабочий орган рабочего инструмента, в варианте осуществления головку 6 триммера 1. Для подачи топливно-воздушной смеси в двигатель 27 внутреннего сгорания впадает впускной канал 26, впускное отверстие которого предпочтительно регулируется по ширине поршнем 30. Впускной канал 26 по меньшей мере частично проведен в карбюраторе 22, в котором к всасываемому воздуху для сгорания добавляется топливо. В карбюраторе 22 помещена с возможностью поворота дроссельная заслонка 23 с валом 24 дросселя. На валу 24 дросселя на наружной стороне корпуса 22 карбюратора зафиксирован рычаг 25 управления подачей топлива, на который воздействует трос управления акселератором 20. Вместо карбюратора 22 возможно также наличие предусмотренного корпуса дросселя для дроссельной заслонки 23, и топливо может подаваться отдельно, например, посредством форсунки, непосредственно в картер 29 двигателя, во впускной канал 26 или в цилиндр 28.
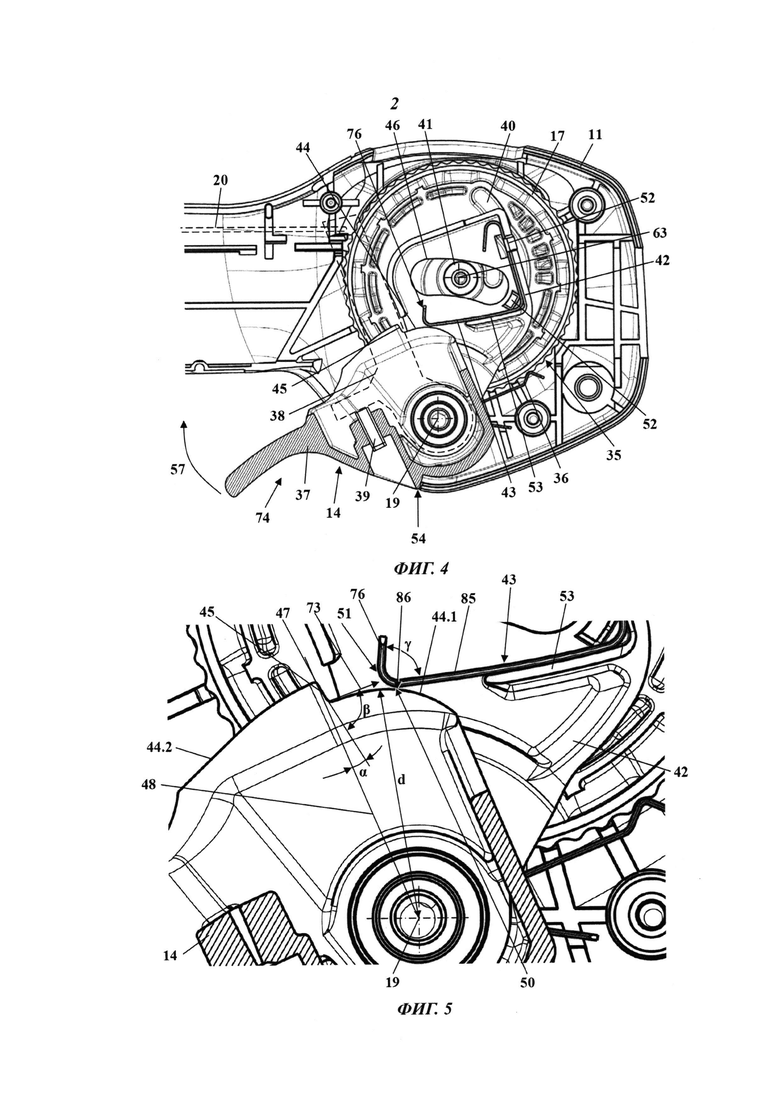
Для триммера 1 часто желательна эксплуатация двигателя 27 внутреннего сгорания не при максимальном числе оборотов, а с уменьшенным числом оборотов, чтобы достигать оптимального результата резания. Для того чтобы облегчить удержание рычага 14 управления акселератором в только частичном включенном положении в течение длительного периода, предусмотрен промежуточный упор 55 (фиг.6), положение которого устанавливается при помощи установочного элемента 17. Как показано на фиг.4, установочный элемент 17 выполнен в виде установочного колеса, которое на стороне, обращенной ко внутренней части корпуса 10 рукоятки, имеет позиционирующий паз 40 в форме спирали. С позиционирующим пазом 40 взаимодействует позиционирующий штифт 58 (фиг.9), который зафиксирован на удерживающем элементе 42. Как показано на фиг.4, удерживающий элемент 42 помещен возможностью поворота вокруг оси 19 поворота рычага 14 управления акселератором и имеет направляющий паз 46, в который входит направляющая цапфа 41. Направляющая цапфа 41 предпочтительно образована головкой крепежного винта для установочного элемента 17. Направляющий паз 46 проходит в форме дуги окружности вокруг оси 19 поворота. На удерживающем элементе 42 закреплена пружина 43. Пружина 43 выполнена как листовая пружина и зафиксирована относительно удерживающего элемента 42 посредством перемычек 52. Пружина 43 имеет свободный конец 76, на котором пружина 43 выполнена изогнутой. Свободный конец 76 пружины 43 прилегает к поверхности 44 скольжения, которая выполнена на рабочем участке 37 рычага 14 управления акселератором. Поверхность 44 скольжения проходит приблизительно в форме дуги окружности вокруг оси 19 поворота. Пружина 43 предпочтительно выполнена из металла, в частности, из пружинной стали. Однако возможно также предпочтительное выполнение пружины 43 из пластмассы.
На наружном периметре установочного элемента 17 имеется показанный на фиг.4 фиксирующий контур 35, который взаимодействует с фиксирующей пружиной 36. Ими определяются фиксирующие положения установочного элемента 17. Благодаря расположению установочного элемента 17 на наружном периметре установочный угол между двумя положениями фиксации получается очень небольшим. Позиционирующий паз 40 и позиционирующий штифт 58 (фиг.9) на удерживающем элементе 42 образуют исполнительный механизм, который делает возможным очень тонкую регулировку положения промежуточного упора 55 (фиг.6). Имеется также возможность предусматривать фиксирующий контур 35, расположенный на внутренней боковой поверхности установочного элемента 17.
Фиг.4 демонстрирует также конструктивное оформление рабочего участка 37 и участка 38 крепления. Участок 38 крепления тоже помещен с возможностью поворота вокруг оси 19 поворота. Между рабочим участком 37 и участком 38 крепления действует натяжной болт 39, который ввинчен в рабочий участок 37 и прилегает к участку 38 крепления. Положение дроссельной заслонки 23 изменяется и тем самым устанавливается путем поворота натяжного болта 39 при невключенном рычаге 14 управления акселератором. Благодаря этому обеспечивается возможность полного поворота дроссельной заслонки 23 из закрытого положения в полностью открытое положение при поворачивании рычага 14 управления акселератором. Имеется возможность настраивать положение холостого хода дроссельной заслонки 23, то есть положение, в котором дроссельная заслонка 23 находится при невключенном рычаге 14 управления акселератором. Как показано на фиг.4, между рабочим участком 37 и чашеобразным элементом 11 образован нулевой упор 54, к которому прилегает рычаг 14 управления акселератором под действием силы возвратной пружины 33 (фиг.3) в показанном на фиг.4 нулевом положении 74. Для увеличения подачи топлива на рабочий участок 37 воздействуют в направлении 57 воздействия.
Как показано на фиг.5, поверхность 44 скольжения имеет первый участок 44.1, к которому пружина 43 прилегает в нулевом положении 74 рычага 14 управления акселератором первой областью 50 прилегания. Область прилегания 50 прилегает к месту 86 прилегания поверхности 44 скольжения. Кроме того, поверхность 44 скольжения имеет второй участок 44.2. Между первым участком 44.1 и вторым участком 44.2 расположена упорная поверхность 45, которая образует наклонную направляющую между обоими участками 44.1 и 44.2. При этом первый участок 44.1 находится на меньшем расстоянии до оси 19 поворота, чем второй участок 44.2. Упорная поверхность 45 наклонена относительно направления 73 движения, в котором поверхность 44 скольжения перемещается относительно пружины 43 при воздействии на рычаг 14 управления акселератором, под углом β, который предпочтительно больше 45°. Угол β предпочтительно составляет более 65°, в частности, больше, чем 70°. Особенно предпочтительным представляется угол β от примерно 75° до примерно 85°. При этом расстояние d от первого участка 44.1 поверхности 44 скольжения до оси вращения 19 постоянно на всем участке 44.1. При перемещении рычага 14 управления акселератором расстояние, на которое сжата пружина 43, не изменяется до тех пор, пока пружина 14 прилегает к первому участку 44.1.
Упорная поверхность 45 на конце 47 переходит во второй участок 44.2 поверхности 44 скольжения. Линия, соединяющая ось 19 поворота с концом 47 упорной поверхности 45, образует с ней угол а, который в варианте осуществления составляет примерно от 8° до 10°. Угол а предпочтительно меньше, в частности, значительно меньше, чем 45°. Как показано также на фиг.5, пружина 43 имеет вторую область 51 прилегания, которая обращена к упорной поверхности 45. Область 50 прилегания расположена на прямом участке 85 рядом с загнутым концом 76. Конец 76 пружины 43 загнут. Конец 76 образует с прямым участком 85 угол γ, который предпочтительно составляет по меньшей мере 80°. Конец 76 переходит в смежный с ним прямой участок 85, образуя закругление с определенным радиусом. Область 51 прилегания расположена в зоне между концом 76 и смежным с ним прямым участком 85, в которой пружина 43 проходит в изогнутой форме. Благодаря изогнутому выполнению пружины 43 между концом 76 и участком 85 предотвращается возможность зацепления пружины 43 на упорной поверхности 45. В результате выполнения в изогнутой форме простым способом обеспечивается действие силы со стороны упорной поверхности 45 на пружину 43 в направлении второго участка 44.2 поверхности 44 скольжения, и пружина 43 упруго деформируется, когда рычаг 14 управления акселератором поворачивают дальше в направлении 57 воздействия. На удерживающем элементе 42 выполнена опорная полка 53, к которой может прилегать пружина 43, когда первая область 50 прилегания прилегает к первому участку 44.1 поверхности 44 скольжения.
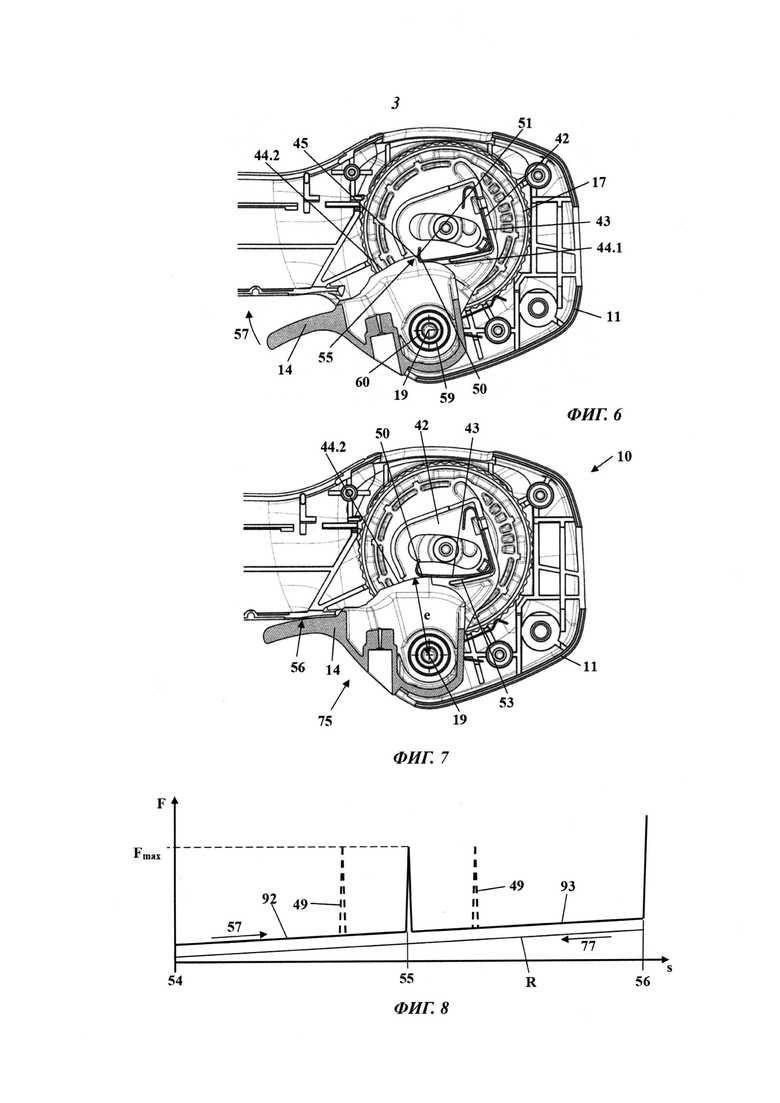
На фиг.6 показана эта конструкция при дальнейшем воздействии на рычаг 14 управления акселератором. Рычаг 14 управления акселератором на фиг.6 нажат в направлении 57 воздействия до достижения промежуточного упора 55. Промежуточный упор 55 образован второй областью 51 прилегания и упорной поверхностью 45. При достижении промежуточного упора 55 первая область 50 прилегания также прилегает к рычагу 14 управления акселератором, а именно к первому участку 44.1 поверхности 44 скольжения. Положение установочного элемента 17 не изменилось по сравнению с положениями, показанными на фигурах 4 и 5. Поэтому пружина 43 удерживается неподвижно относительно корпуса 10 рукоятки. Рычаг 14 управления акселератором перемещается относительно корпуса 10 рукоятки и относительно пружины 43.
На фиг.7 показан рычаг 14 управления акселератором после дальнейшего воздействия на него в направлении 57 воздействия (фиг.6), в максимальном положении 75, в котором рычаг 14 управления акселератором прилегает к конечному упору 56, выполненному на корпусе 10 рукоятки. В этом положении первая область 50 прилегания пружины 43 прилегает ко второму участку 44.2 поверхности 44 скольжения. Пружина 43 удалилась от опорной полки 53, причем вследствие увеличенного расстояния от второго участка 44.2 поверхности 44 скольжения до оси 19 поворота. Участок 44.2 на всей своей длине имеет постоянное расстояние е до оси вращения 19. Вследствие этого пружина 43 при движении рычага 14 управления акселератором, во время прилегания пружины 43 ко второму участку 44.2 поверхности 44 скольжения, не деформируется дальше.
На фиг.8 показан ход изменения управляющего усилия F в зависимости от управляющего перемещения s рычага 14 управления акселератором. Сначала при воздействии на рычаг 14 управления акселератором управляющее усилие F линейно возрастает, начинаясь от нулевого упора 54, как указывает линия 92, в соответствии с воздействием в направлении 57. Увеличение управляющего усилия F по существу определяется возвратной пружиной 33 и еще одной возвратной пружиной дроссельной заслонки 23, при ее наличии. Пружина 43 действует на поверхность 44 скольжения примерно в направлении оси 19 поворота и вследствие этого не оказывает действия вращающего момента на рычаг 14 управления акселератором. Однако может оказаться предпочтительной также и другая форма поверхности 44 скольжения или другое направление пружины 43, при которых на рычаг 14 управления акселератором действует дополнительный момент по направлению к его нулевому положению 74 (фиг.5). При достижении промежуточного упора 55 управляющее усилие F очень резко увеличивается до максимального управляющего усилия Fmax. Увеличение управляющего усилия F создается в результате упругой деформации пружины 43 на упорной поверхности 45. Поскольку упорная поверхность 45 направлена под очень большим углом по отношению к направлению 73 движения (фиг.5) и вследствие этого только незначительная часть приводного усилия F действует в направлении, необходимом для эластичной деформации пружины 43, максимальное управляющее усилие Fmax получается очень большим. Имеется возможность задавать величину максимального управляющего усилия Fmax конструктивными мерами, посредством угла β или соответствующего угла α. Как только первая область 50 прилегания пружины 43 прилегает ко второму участку 44.2 поверхности 44 скольжения, управляющее усилие F снова резко уменьшается. В показанном варианте осуществления управляющее усилие уменьшается до значения, которое лежит приблизительно на продолжении линии от нулевого упора 54 к промежуточному упору 55. Далее управляющее усилие F увеличивается линейно до достижения конечного упора 56, как указывает линия 93. При этом в варианте осуществления линия 93 лежит на продолжении линии 92 и имеет такой же угол наклона графика, как и линия 92.
Как показано на фиг.8 пунктирными линиями 49, возможно смещение положения промежуточного упора 55, а именно путем поворота установочного элемента 17. Предпочтительно возможно перемещение положения промежуточного упора 55 по всей области между нулевым упором 54 и конечным упором 56. При этом конструкция предпочтительно выбирается таким образом, что возможна установка положения промежуточного упора 55 в процессе эксплуатации. Предпочтительно возможно перемещение установочного элемента 17 при положении прилегания пружины 43 рычага 14 управления акселератором к промежуточному упору 55. Это позволяет устанавливать во время эксплуатации положение промежуточного упора 55 одновременно с желаемым положением рычага управления акселератором.
На фиг.8 обозначено также возвратное усилие R, действующее на рычаг 14 управления акселератором, которое вызывает возвратная пружина 33, когда рычаг 14 управления акселератором высвобождается и перемещается в направлении 77, обратном по отношению к направлению 57 воздействия. Возвращающее усилие R изменяется линейно, следовательно, коэффициент жесткости возвратной пружины 33 постоянен. Через промежуточный упор 55 не оказывается никакого дополнительного противодействующего усилия R ни до, ни после прохождения промежуточного упора 55. Сам промежуточный упор 55 предпочтительно также не создает дополнительного возвратного усилия R на рычаг 14 управления акселератором.
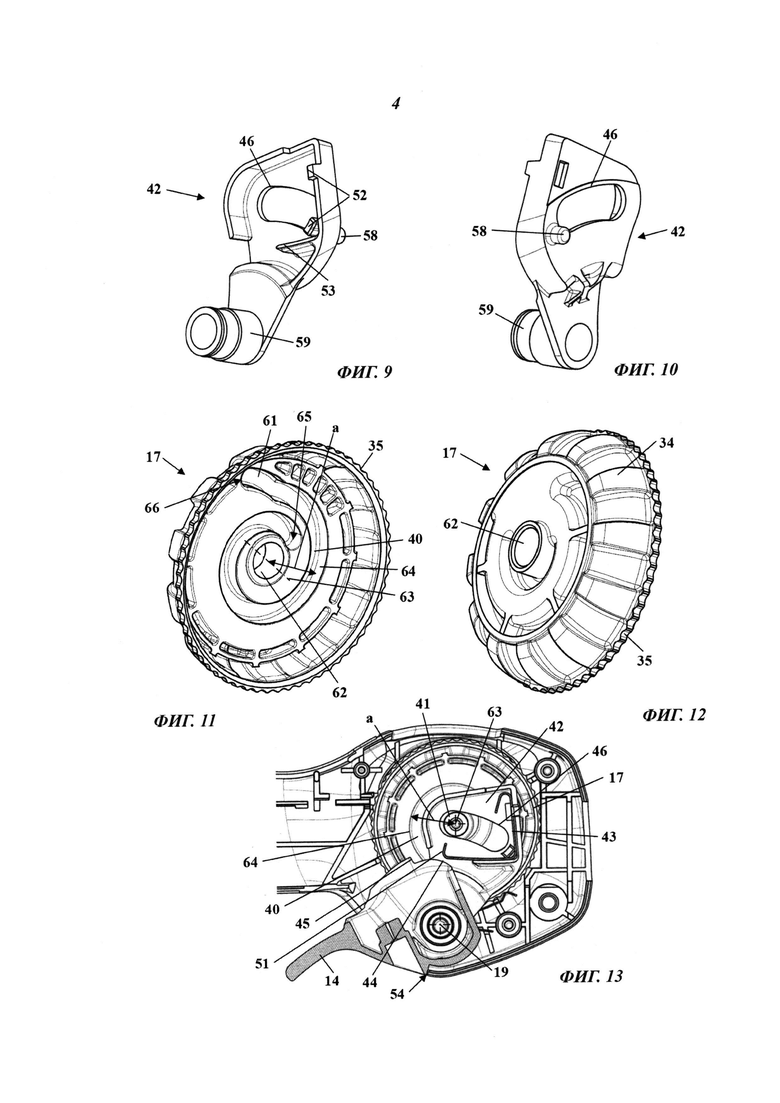
На фигурах 9 и 10 исполнение удерживающего элемента 42 показано детально. Удерживающий элемент 42 имеет опорную цапфу 59, которая, как показано на фиг.6, проходит сквозь рычаг 14 управления акселератором и служит в качестве подшипника для рычага 14 управления акселератором. Опорная цапфа 59 в свою очередь помещена на цапфе 60 корпуса, также показанной на фиг.6. На фигурах 9 и 10 показан также позиционирующий штифт 58, который входит в позиционирующий паз 40.
На фигурах 11 и 12 показан установочный элемент 17. Установочный элемент 17 выполнен приблизительно в форме чаши. Область удерживающего элемента 42, который держит пружину 43, позиционирующий штифт 58, а также область, которая содержит направляющий паз 46, расположены в пространстве, окруженном краем установочного элемента 17. Благодаря этому размер устройства получается небольшим. Установочный элемент 17 помещен с возможностью поворота вокруг оси 63 вращения, которая показана также на фиг.4. Установочный элемент 17 имеет опорное отверстие 62, которое окружает ось 63 вращения и в которое входит не показанная опорная цапфа корпуса 10 рукоятки. На стороне, обращенной к удерживающему элементу 42, установочный элемент 17 имеет позиционирующий паз 40. Позиционирующий паз 40 проходит спиралеобразно вокруг оси 63 вращения. Позиционирующий паз 40 имеет внутренний конец 65 и внешний конец 66. Рядом с внешним концом 66 позиционирующего паза 40 имеется конечный участок 61, на котором позиционирующий паз 40 проходит более обрывисто, то есть загнут под большим углом относительно тангенциального направления вокруг оси 63 вращения. Вследствие этого невозможна фиксация промежуточного упора 55 в области непосредственно перед достижением положения рычага 14 управления акселератором, соответствующего максимальной подаче топлива. Направление конечного участка 61 выбрано таким, что при положении позиционирующего штифта 58 на конечном участке 61 рычаг управления акселератором нажимает на промежуточный упор 55 вплоть до его конечного положения.
Позиционирующий паз 40 имеет наружную стенку 64, на которую позиционирующий штифт 58 (фиг.9) нажимает при переходе через промежуточный упор 55. Наружная стенка 64 находится от оси 63 вращения на расстоянии а, которое непрерывно увеличивается от внутреннего конца 65 к внешнему концу 66. При этом изменение расстояния а настолько незначительно, что пружина 43 в обычном режиме эксплуатации расположена неподвижно и упруго деформируется на промежуточном упоре 55. Сила, действующая со стороны пружины 43 на установочный элемент 17 в направлении вращения установочного элемента 17 в положении у промежуточного упора 55, слишком мала, а действующие силы трения слишком высоки, чтобы поворачивать установочный элемент 17.
На фиг.13 устройство показано в той позиции, в которой промежуточный упор 55 находится в положении, соответствующем максимальной подаче топлива. При этом положение максимальной подачи топлива - это такое положение рычага 14 управления акселератором, в котором рычаг 14 управления акселератором прилегает к конечному упору 56. Позиционирующий штифт 58 (фигуры 9 и 10) находится на внешнем конце 66 позиционирующего паза 40 (фиг.11). Направляющая цапфа 41 расположена на другом конце направляющего паза 46.
На фиг.13 промежуточный упор 55 показан рядом с тем его положением, которое соответствует положению холостого хода рычага 14 управления акселератором. При этом положение холостого хода рычага 14 управления акселератором - это такое положение, в котором рычаг 14 управления акселератором прилегает к нулевому упору 54. Позиционирующий штифт 58 (фигуры 9 и 10) расположен рядом с внутренним концом 65 позиционирующего паза 40 (фигуры 11 и 12). Как только на рычаг 14 управления акселератором оказывается незначительное воздействие, вторая область 51 прилегания приходит в соприкосновение с упорной поверхностью 45. Направляющая цапфа 41 находится на другом конце направляющего паза 46.
На фигурах 15 и 16 показаны варианты осуществления для оформления промежуточного упора 55, при которых вместо рычага 14 управления акселератором, выполненного с возможностью поворота, предусмотрены салазки 67. При этом салазки 67 приводятся в действие непосредственно пользователем, или же рычаг управления акселератором, выполненный с возможностью поворота действует на линейно перемещаемые салазки 67. Для воздействия на акселератор салазки 67 выполнены с возможностью перемещения в направлении 70 воздействия, а именно в направлении, противоположном силе возвратной пружины 33, которая в схематичных изображениях на фигурах 15 и 16 представлена в виде винтовой пружины сжатия.
При варианте осуществления по фиг.15 салазки 67 имеют поверхность 44 скольжения с обоими участками 44.1 и 44.2 и с упорной поверхностью 45. В корпусе 10 рукоятки расположен с возможностью перемещения в направлении стрелки 72 пружинящий элемент, а именно шар 68. Шар 68 подпружинен нажимной пружиной 69. При приведении в действие салазок 67 шар 68 вступает в контакт с упорной поверхностью 45. Вследствие этого управляющее усилие F, требуемое для дальнейшего перемещения салазок 67, резко увеличивается. После преодоления упорной поверхности 45 шар 68 прилегает ко второму участку 44.2 поверхности 44 скольжения. Участки 44.1 и 44.2 поверхности 44 скольжения проходят параллельно направлению 70 воздействия, так что здесь требуется только незначительное управляющее усилие, которое вызвано по существу действием возвратной пружиной 33. Возможно также другое предпочтительное оформление пружинящего элемента.
На фиг.16 шар 68 с нажимной пружиной 69 расположен на салазках 67, а поверхность 44 скольжения выполнена на ползуне 71, который помещен в корпусе 10 рукоятки с возможностью перемещения в направлении стрелки 72. Здесь создается соответствующий рост и после преодоления промежуточного упора 55 соответствующее уменьшение управляющего усилия F. В вариантах осуществления по фиг.15 и 16 упорная поверхность 45 также образует наклонную направляющую, так что в направлении, обратном направлению воздействия 70, то есть при высвобождении салазок 67, упор не действует.
На фиг.17 вариант осуществления показан с рычагом 14 управления акселератором, находящимся в максимальном положении 75. Это положение соответствует положению, показанному для первого варианта осуществления на фиг.7. Те же обозначения, что и на предшествовавших фигурах, характеризуют соответствующие друг другу элементы. Конструкция рукоятки 4, показанной на фиг.17, соответствует конструкции рукоятки 4 с фигур 2-14. Рукоятка 4, показанная на фиг.17, отличается от рукоятки с фигур 2-14 выполнением поверхности 44 скольжения рычага 14 управления акселератором. Первый участок 44.1 поверхности 44 скольжения выполнен в соответствии с оформлением, показанным на фиг.2-14, и имеет форму дуги вокруг оси 19 поворота. Расстояние d от поверхности 44.1 скольжения до оси вращения 19 постоянно. Второй участок 44.2 поверхности 44 скольжения, к которому пружина 43 прилегает после преодоления промежуточного упора 55, имеет отличающуюся форму. Участок 44.2 при прохождении от промежуточного упора 55 до места 86 прилегания, на котором пружина 43 прилегает к максимальному положению 75 рычага 14 управления акселератором, все больше отдаляется от оси 19 поворота. Непосредственно после промежуточного упора 55 участок 44.2 поверхности 44 скольжения находится на расстоянии b до оси 19 поворота. Место 86 прилегания, на котором пружина 43 прилегает к максимальному положению 75 рычага 14 управления акселератором, находится от оси 19 поворота на расстоянии с, которое больше, чем расстояние Ь. Расстояние от поверхности 44.2 скольжения до оси 19 поворота непрерывно увеличивается с величины b до величины с. Вследствие этого при движении рычага 14 управления акселератором после преодоления промежуточного упора 55 вплоть до максимального положения 75 пружина натягивается все больше. Управляющее усилие F, необходимое для перемещения рычага 14 управления акселератором на величину заданного перемещения s (фиг.18), то есть для поворота рычага 14 управления акселератором на заданный угол поворота, до достижения промежуточного упора 55 меньше, чем после достижения промежуточного упора 55.
Второй участок 44.2 поверхности 44 скольжения проходит не параллельно, то есть не тангенциально к направлению 73 движения поверхности 44 скольжения в каждой точке поверхности 44 скольжения, а под углом к направлению 73 движения. Это показано в увеличенном виде на фиг.20. Касательная к поверхности 44 скольжения на участке 4.2 образует с направлением 73 движения поверхности 44 скольжения угол δ. Угол δ предпочтительно составляет примерно от 3° до 30°. Чем больше угол δ, тем больше возвратное усилие R, оказываемое на рычаг 14 управления акселератором. На поверхность 44 скольжения действует перпендикулярно ей пружина 43, что также показано на фиг.20. Пружина воздействует на поверхность 44 скольжения с силой 90, направление действия которой проходит на расстоянии f до оси 19 поворота. Вследствие этого со стороны пружины 43 на рычаг 14 управления акселератором действует момент, который направлен противоположно направлению 57 воздействия (фиг.6).
На фиг.18 показан ход изменения приводного усилия для показанных на фиг.17 вариантов осуществления. Первая линия 83 показывает изменение управляющего усилия F до промежуточного упора. До достижения промежуточного упора 55 управляющее усилие F увеличивается линейно и с незначительной скоростью повышения. На промежуточном упоре 55 вследствие крутого подъема упорной поверхности в форме наклонной направляющей 45 наблюдается очень резкий рост усилия вплоть до максимального управляющего усилия Fmax. Это соответствует ходу изменения сил в предшествовавших вариантах осуществления. После преодоления промежуточного упора 55 управляющее усилие F уменьшается до значения, которое лежит выше уровня прямолинейного продолжения линии 83. Управляющее усилие F после преодоления промежуточного упора 55 уменьшается не до продолжения линии 83, так как пружина 43 посредством силы 90 воздействует на рычаг 14 управления акселератором дополнительным моментом, который противодействует приводному усилию F. До достижения конечного упора 56 управляющее усилие F увеличивается более резко. Это показано линией 84, повышение которой более резко, чем повышение линии 83. Вследствие повышения необходимого управляющего усилия F на втором участке 44.2 поверхности 44 скольжения, то есть после преодоления промежуточного упора 55, пользователь получает более явную информацию о том, что промежуточный упор 55 уже преодолен. Возвратное усилие R после преодоления промежуточного упора 55, то есть когда пружина 43 прилегает ко второму участку 44.2, значительно больше, чем до достижения промежуточного упора 55. Это показано линией 87. Имеется также возможность предусматривать для линии 84 после достижения промежуточного упора 55 совпадение с продолжением линии 83 и больший наклон, чем у линии 83. Это показано штрихпунктирной линией 91. Желаемая характеристика изменения управляющего усилия F и возвратного усилия R устанавливается соответствующим формированием второго участка 44.2 поверхности 44 скольжения.
При высвобождении рычага 14 управления акселератором создается возвратное усилие R, которое направлено параллельно линиям 84 и 83. Возвратное усилие R отводит рычаг 14 управления акселератором в его нулевое положение 74 (фиг.4). Для области между промежуточным упором 55 и конечным упором 56 возвратное усилие R представлено линией 87.
На фиг.19 схематично показан вариант осуществления, при котором рычаг 14 управления акселератором действует на электродвигатель 81. Рычаг 14 управления акселератором включает в себя рабочий участок 37, который соединен регулируемым образом с рабочим участком 78. Регулировка осуществляется в соответствии с вариантом осуществления, показанным на фигурах 3 и 4, посредством натяжного винта 39. Однако возможно также предусмотренное жесткое соединение рабочих участков 37 и 78 друг с другом, или выполнение рычага 14 управления акселератором как единого целого. Рабочий участок 78 воздействует на потенциометр 79, который соединен с управляющим устройством 80. Сигнал, передаваемый от потенциометра 79 на управляющее устройство 80, варьируется в зависимости от положения рычага 14 управления акселератором. Управляющее устройство 80 соответствующим образом управляет электродвигателем 81. Электродвигатель 81 соединен с устройством 82 энергоснабжения, которое представляет собой, например, батарею, аккумулятор или соединительный кабель для подключения к внешнему источнику энергоснабжения. Все показанные варианты осуществления могут использоваться как с двигателем 27 внутреннего сгорания, так и с электродвигателем 81.
На фиг.21 показан вариант осуществления для участка 44.2 поверхности 44 скольжения. Поверхность 44 скольжения на втором участке 44.2 наклонена относительно направления 73 движения на угол 6, который значительно больше, чем угол δ, показанный на фиг.17. Вследствие этого при варианте осуществления, показанном на фиг.21, когда пружина 43 прилегает ко второму участку 44.2, получается большее управляющее усилие F и большее возвратное усилие R, действующие на рычаг 14 управления акселератором. Сила 90, с которой пружина 43 воздействует на поверхность 44 скольжения в максимальном положении 75 (фиг.17), направлена не к оси 19 поворота, а проходит на расстоянии f от оси 19 поворота и вследствие этого создает момент, действующий на рычаг 14 управления акселератором в направлении, противоположном воздействию 57 (фиг.4). Как показано на фиг.20 и 21, расстояние f в варианте осуществления, показанном на фиг.20, больше, чем в варианте осуществления, показанном на фиг.21. Вследствие этого управляющее усилие F и возвратное усилие R получаются большими.
Ход изменения управляющего усилия F между промежуточным упором 55 и конечным упором 56 изображен на фиг.18 пунктирной линией 88. В варианте осуществления линия 88 проходит параллельно линии 84. Линия 88 смещена параллельно линии 84 в направлении более высоких усилий F. Возвратное усилие R между промежуточным упором 55 и конечным упором 56 показано на фиг.18 пунктирной линией 89. Линия 89 также проходит выше линии 87. Следовательно, возвратное усилие R при варианте осуществления, показанном на фиг.21, также больше, чем при варианте осуществления, показанном на фиг.17. Расстояние с между осью 19 поворота рычага 14 управления акселератором и областью поверхности 44 скольжения, к которой пружина 43 прилегает в максимальном положении 75 (фиг.17) рычага 14 управления акселератором, больше, чем расстояние с, показанное на фиг.17. При этом форма второго участка 44.2 поверхности 44 скольжения выбрана такой, что момент, действующий на рычаг 14 управления акселератором в направлении возврата, то есть в направлении, противоположном показанному на фиг.4 направлению 57 воздействия, остается постоянным.
Во всем остальном, кроме оформления второго участка 44.2, вариант осуществления, показанный на фиг.21, соответствует вариантам осуществления, показанным на предшествовавших фигурах.
Линия 84, 88, 91, 93, которая отражает изменение управляющего усилия F по отношению к перемещению s в области между промежуточным упором 55 и конечным упором 56, может иметь такой же или другой, в частности, больший наклон, чем линия 83, 92, которая отражает изменение управляющего усилия F по отношению к перемещению s в области между нулевым упором 54 и промежуточным упором 55. Линия 84, 88 может быть смещена относительно линии 83 в направлении больших управляющих усилий F. Однако имеется также возможность предусматривать прохождение линии 93, которая отражает изменение управляющего усилия F по отношению к перемещению s в области между промежуточным упором 55 и конечным упором 56, в виде продолжения линии 92. При этом линия 92 отражает изменение управляющего усилия F по отношению к перемещению s в области между нулевым упором 54 и промежуточным упором 55. Может предусматриваться также постоянное значение управляющего усилия F в области между промежуточным упором 55 и конечным упором 56. Это достигается формированием поверхности 44 скольжения, на которой пружина 43 производит момент, действующий против силы возвратной пружины 33 (фиг.3).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОКОННЫЕ И/ИЛИ ДВЕРНЫЕ ПРИБОРЫ | 1999 |
|
RU2211903C2 |
| Двигатель внутреннего сгорания | 1991 |
|
SU1802191A1 |
| Система управления скоростью транспортного средства | 1981 |
|
SU1054124A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| РАБОЧИЙ ИНСТРУМЕНТ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2655823C2 |
| ТРАНСПОРТИРОВОЧНАЯ ТЕЛЕЖКА ДЛЯ ИГОЛЬНЫХ ДОСОК | 2008 |
|
RU2401334C2 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| ПЕЧАТНАЯ МАШИНА ДЛЯ ПЕЧАТИ ЦЕННЫХ БУМАГ С ОФСЕТНЫМ ПЕЧАТНЫМ АППАРАТОМ ОРЛОВА, А ТАКЖЕ СПОСОБ СМЕНЫ ПЕЧАТНОЙ ФОРМЫ И ЗАПУСКА ПРОИЗВОДСТВА | 2014 |
|
RU2636882C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАНОСЯЩИХ КРАСКУ ТЕЛ ВРАЩЕНИЯ ПЕЧАТНОЙ МАШИНЫ | 2014 |
|
RU2635291C2 |
| ПРОХОДНОЙ ЗАПОРНЫЙ КЛАПАН, САМОЗАКРЫВАЮЩИЙСЯ ПРИ ОТСУТСТВИИ ДАВЛЕНИЯ НА ЕГО ВХОДЕ | 2003 |
|
RU2258167C1 |
Изобретение относится к сельскому хозяйству. Рабочий инструмент с приводным двигателем для приведения в движение по меньшей мере одного рабочего органа и с управляющим устройством для двигателя, которое содержит орган управления, приводимый в действие пользователем, причем орган управления помещен в корпусе подвижно и выполнен с возможностью перемещения в направлении (57, 70) воздействия от нулевого положения (74) до максимального положения (75), при этом между нулевым положением (74) и максимальным положением (75) действует промежуточный упор (55), положение которого регулируется посредством установочного элемента (17), причем после достижения промежуточного упора (55) обеспечена возможность дальнейшего воздействия на орган управления вплоть до максимального положения (75) с увеличением управляющего усилия (F) для дальнейшего приведения в действие органа управления при достижении промежуточного упора (55), причем после преодоления промежуточного упора (55) при дальнейшем воздействии на орган управления в направлении (57, 70) воздействия управляющее усилие (F) снова уменьшается. Изобретение позволяет создать рабочий инструмент, на котором возможна работа без усталости также при высоких скоростях вращения и который облегчает работу при различных уменьшенных числах оборотов. 18 з.п. ф-лы, 21 ил.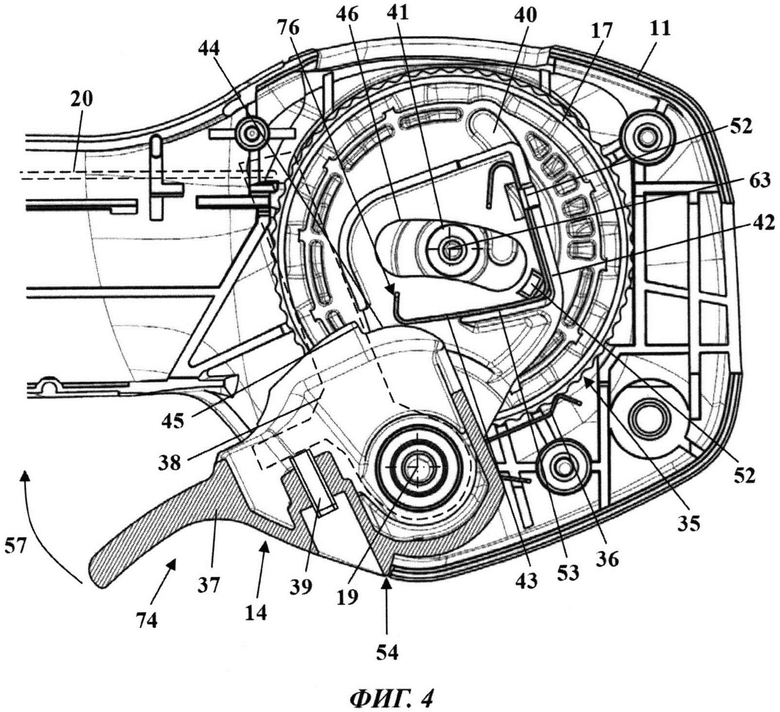
1. Рабочий инструмент с приводным двигателем для приведения в движение по меньшей мере одного рабочего органа и с управляющим устройством для двигателя, которое содержит орган управления, приводимый в действие пользователем, причем орган управления помещен в корпусе подвижно и выполнен с возможностью перемещения в направлении (57, 70) воздействия от нулевого положения (74) до максимального положения (75), при этом между нулевым положением (74) и максимальным положением (75) действует промежуточный упор (55), положение которого регулируется посредством установочного элемента (17), причем после достижения промежуточного упора (55) обеспечена возможность дальнейшего воздействия на орган управления вплоть до максимального положения (75) с увеличением управляющего усилия (F) для дальнейшего приведения в действие органа управления при достижении промежуточного упора (55),
отличающийся тем, что после преодоления промежуточного упора (55) при дальнейшем воздействии на орган управления в направлении (57, 70) воздействия управляющее усилие (F) снова уменьшается.
2. Рабочий инструмент по п.1, отличающийся тем, что управляющее усилие (F) после преодоления промежуточного упора (55) меньше, чем половина максимального управляющего усилия (F) при преодолении промежуточного упора (55).
3. Рабочий инструмент по п.1 или 2, отличающийся тем, что промежуточный упор (55) образован первым упорным элементом, соединенным с органом управления, и вторым упорным элементом, соединенным с корпусом, причем упорные элементы выполнены с возможностью перемещения относительно друг друга на протяжении всего управляющего хода (s) органа управления, от нулевого положения (74) до максимального положения (75).
4. Рабочий инструмент по п.3, отличающийся тем, что один из упорных элементов представляет собой пружинящий элемент, а другой упорный элемент - упорную поверхность (45).
5. Рабочий инструмент по п.4, отличающийся тем, что упорная поверхность (45) имеет наклон относительно направления (73) движения пружинящего элемента при достижении им упорной поверхности (45) под углом (β), составляющим больше 45°.
6. Рабочий инструмент по одному из пп. 4 или 5, отличающийся тем, что при приведении в действие органа управления пружинящий элемент скользит по поверхности (44) скольжения, которая имеет первый участок (44.1), расположенный в направлении (57, 70) воздействия перед упорной поверхностью (45), и второй участок (44.2), расположенный в направлении (57, 70) воздействия за упорной поверхностью (45), причем упорная поверхность (45) образует наклонную направляющую между обоими участками (44.1, 44.2) поверхности (44) скольжения.
7. Рабочий инструмент по п.6, отличающийся тем, что поверхность (44) скольжения на первом участке (44.1) и на втором участке (44.2) проходит приблизительно параллельно направлению (73) перемещения поверхности (44) скольжения.
8. Рабочий инструмент по п.6, отличающийся тем, что поверхность (44) скольжения на втором участке (44.2) проходит под углом относительно направления (73) перемещения, в котором поверхность (44) скольжения перемещается относительно пружинящего элемента при воздействии на орган управления.
9. Рабочий инструмент по п.8, отличающийся тем, что поверхность (44) скольжения расположена с возможностью поворота вокруг оси (19) поворота, причем обеспечено непрерывное увеличение расстояния (b, с) от оси вращения (19) до места (86) прилегания, в котором пружинящий элемент прилегает к поверхности (44) скольжения, на протяжении второго участка (44.2) при движении органа управления в направлении (57, 70) воздействия.
10. Рабочий инструмент по п.3, отличающийся тем, что установочный элемент (17) выполнен с возможностью воздействия посредством исполнительного механизма на по меньшей мере один из обоих упорных элементов.
11. Рабочий инструмент по п.10, отличающийся тем, что исполнительный механизм имеет позиционирующий штифт (58), который проходит в позиционирующем пазу (40).
12. Рабочий инструмент по п.11, отличающийся тем, что позиционирующий паз (40) имеет форму спирали.
13. Рабочий инструмент по п.11 или 12, отличающийся тем, что позиционирующий паз (40) выполнен в установочном элементе (17), а позиционирующий штифт (58) жестко соединен с одним из упорных элементов.
14. Рабочий инструмент по п.10, отличающийся тем, что установочный элемент (17) выполнен с возможностью воздействия на второй упорный элемент, причем для перемещения промежуточного упора (55) второй упорный элемент выполнен подвижным в направлении (57, 70) воздействия органа управления.
15. Рабочий инструмент по п.14, отличающийся тем, что орган управления расположен с возможностью поворота вокруг оси (19) поворота, при этом для перемещения промежуточного упора (55) второй упорный элемент выполнен с возможностью поворота вокруг оси (19) поворота органа управления.
16. Рабочий инструмент по п.3, отличающийся тем, что орган управления представляет собой рычаг (14) управления акселератором, который включает в себя рабочий участок (37), приводимый в действие пользователем, и крепежный участок (38), на котором установлен передающий элемент для передачи регулирующего движения рычага (14) управления акселератором на двигатель, причем относительное расположение рабочего участка (37) и крепежного участка (38) является регулируемым, причем на рабочем участке (37) закреплен упорный элемент.
17. Рабочий инструмент по п.1, отличающийся тем, что положение установочного элемента (17) является регулируемым независимо от положения органа управления.
18. Рабочий инструмент по п.1, отличающийся тем, что орган управления подпружинен по направлению к своему нулевому положению (74), при этом управляющее усилие (F), которое требуется для перемещения органа управления на определенную величину (s) перемещения, примерно одинаково по величине перед достижением промежуточного упора (55) и после преодоления промежуточного упора (55).
19. Рабочий инструмент по п.1, отличающийся тем, что орган управления подпружинен по направлению к своему нулевому положению (74), при этом управляющее усилие (F), которое требуется для перемещения органа управления на определенную величину (s) перемещения, перед достижением промежуточного упора (55) меньше, чем после преодоления промежуточного упора (55).
| Фазовращатель СВЧ | 1983 |
|
SU1223318A1 |
| DE 102010023079 A1, 08.12.2011 | |||
| US 5765445 A1, 16.06.1998 | |||
| US 20020088431 A1, 11.07.2002. | |||

