Изобретение относится к навесному рабочему оборудованию гидравлических экскаваторов.
Цель изобретения - расширение технологических возможностей за счет работы в стесненньк условиях.
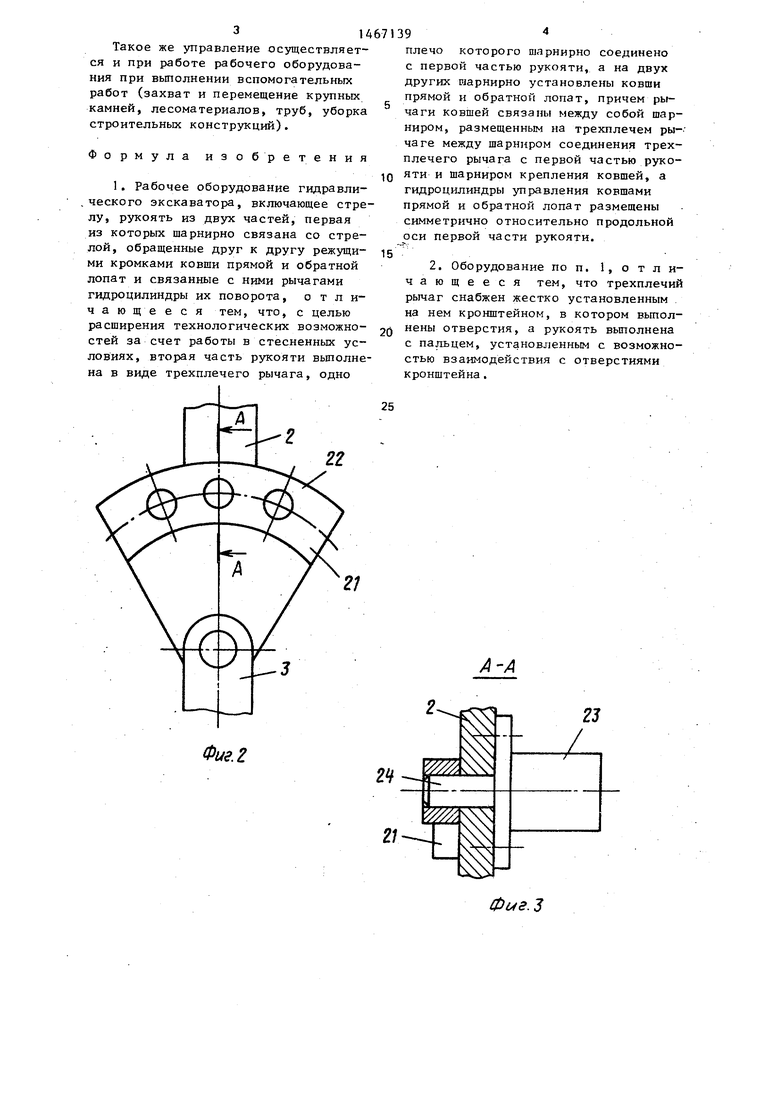
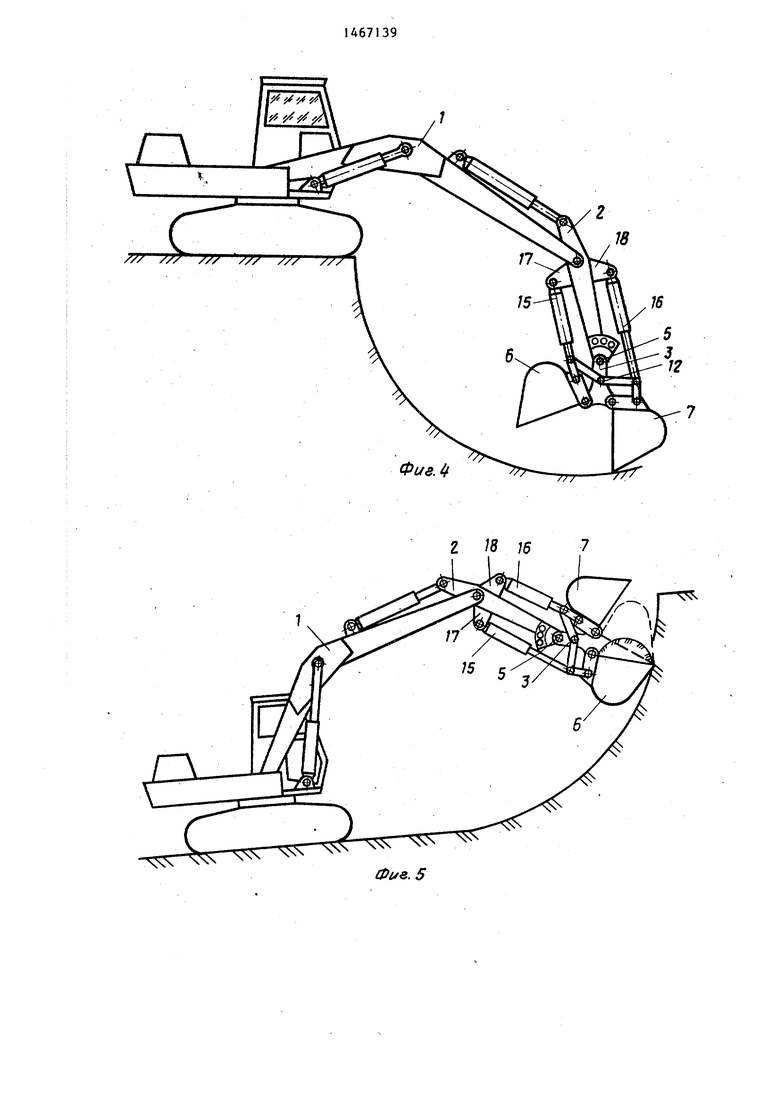
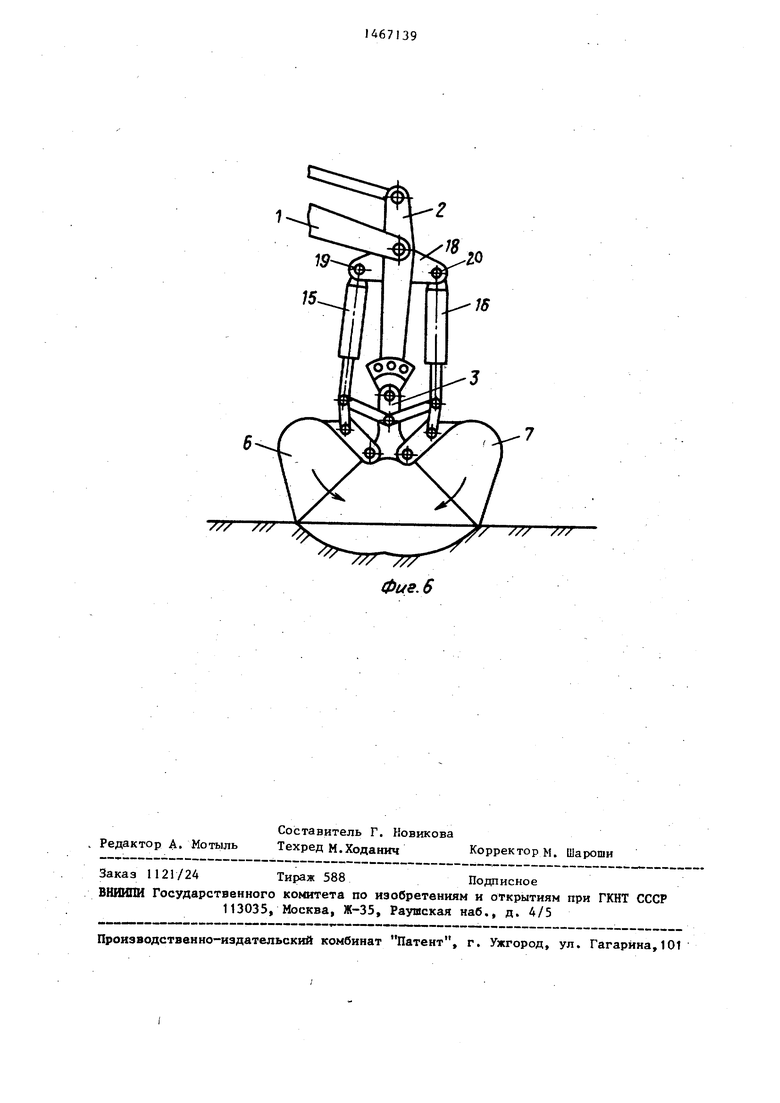
На фиг. 1 изображен гидравлический экскаватор с рабочим оборудованием, общий вид; на фиг. 2 - меха- низм фиксации поворотного оголовка; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - экскаватор в режиме работы Обратная лопата ; на фиг. 5 - то же, в режиме Прямая лопата ; на фиг. 6 - то же, в режиме Грейфер. . Рабочее оборудование состоит из стрелы 1, рукояти из двух частей: первой 2 и второй - поворотного оголовка 3, шарнирно соединенных между собой соответственно шарнирами 4 и 5. Поворотный оголовок выполнен в виде трехплечего рычага.
Ковши 6 и 7 прямой и обратной лопат посредством шарниров 8 и 9 сое динены с двумя, плечами трехплечего рычага, а его третье плечо соединено шарниром 5 с первой частью рукояти.
Рычаги 10 и 11 поворота ковшей 6 и 7 прямой и обратной лопат одним кондом соединены шарнирно на одной оси 12, а другим - с тягой 13 и 14 и со штоками гидроцилиндров 15 и 16 поворота ковшей прямой и обратной лопат, корпуса которых посредством осей 17 и 18 шарнирно связаны с проушинами 1.9 и 20, жестко смон тирован- ными симметрично относительно продольной оси основной части рукояти 2 Поворотный оголовок 3 в верхней части снабжен жестко установленным на нем кронштейном 21 с отверстиями 22. На внутренней стенке основной части рукояти 2 установлен электрома.гнит 23, который снабжен управляемым пальцем 24.
Рабочее оборудование гидравлического экскаватора работает следующим образом.
Работа в режиме Обратная лопата
Гидроцилиндром 15 происходит пово рот ковша 6 прямой лопаты относитель но шарнира 8 и при дальнейшем втягивании штока г ид I3O цилиндра 15 происходит поворот поворотного оголовка 3 относительно шарнира ,5 на необходи- мый угол в сторону базовой машины, при этом должен быть включен электромагнит 23, который выводит из соеди
д 5 0
5
о
5
5
нения управляемый палец 24 из отверстия 22. При повороте оголовка 3 на | определенный угол в сторону базовой машины отключают электромагнит 23 и управляемый палец 24 входит в одно из отверстий 22 кронштейна 21. Происходит фиксация положения поворотного оголовка 3 относительно основной части рукояти 2. Дальнейшая работа происходит как у традиционного рабочего оборудования. Набор грунта в ковш может производиться как поворотом ковша 7 обратной лопаты, так и поворотом первой части 2 рукояти. На заключительном этапе процесса копания целесообразно при помощи гидроцилиндра 15 поворачивать ковш 6 прямой лопаты навстречу ковшу 7 обратной лопаты, при этом происходит снижение сил, действующих на стрелу 1 и базовую машину, и увеличивается коэффициент набора грунта в ковш, исключает высыпание грунта из ковша, что повышает в Целом производительность экскаватора. Разгрузка грунта происходит втягиванием штоков гидроцилиндров 15 и 16 поворота ковшей прямой и обратной лопат.
Работа в режиме Прямая лопата. При работе прямой лопатой целесообразно поворачивать поворотный оголовок в противоположную сторону от базовой машины. Поворот происходит |При помощи гидроцилиндра 16 с одновременным включением электромагнита . 23 и вывода управляемого пальца 24 из отверстия 22 на необходимый угол, затем отключается электромагнит 23, управляемый палец 24 входит в одно из отверстий 22 и происходит фиксация поворотного оголовка 3 относительно продольной оси первой части 2 рукояти. Набор грунта в ковш может производиться как поворотом ковша, так и поворотом первой части 2 рукояти совместно с поворотным оголовком 3. Разгрузка грунта происходит обычным способом .
Работа в режиме Грейфер.
Поворотный оголовок 3 устанавливается в необходимое положение и при помощи гидроцилиндров 15 и 16 происходит набор грунта р ковш. Работать в режиме грейфера возможно при любом положении поворотного оголовка 3 в зависимости от условий производства земляных работ.
22
Фиг. 2
А-А
/
23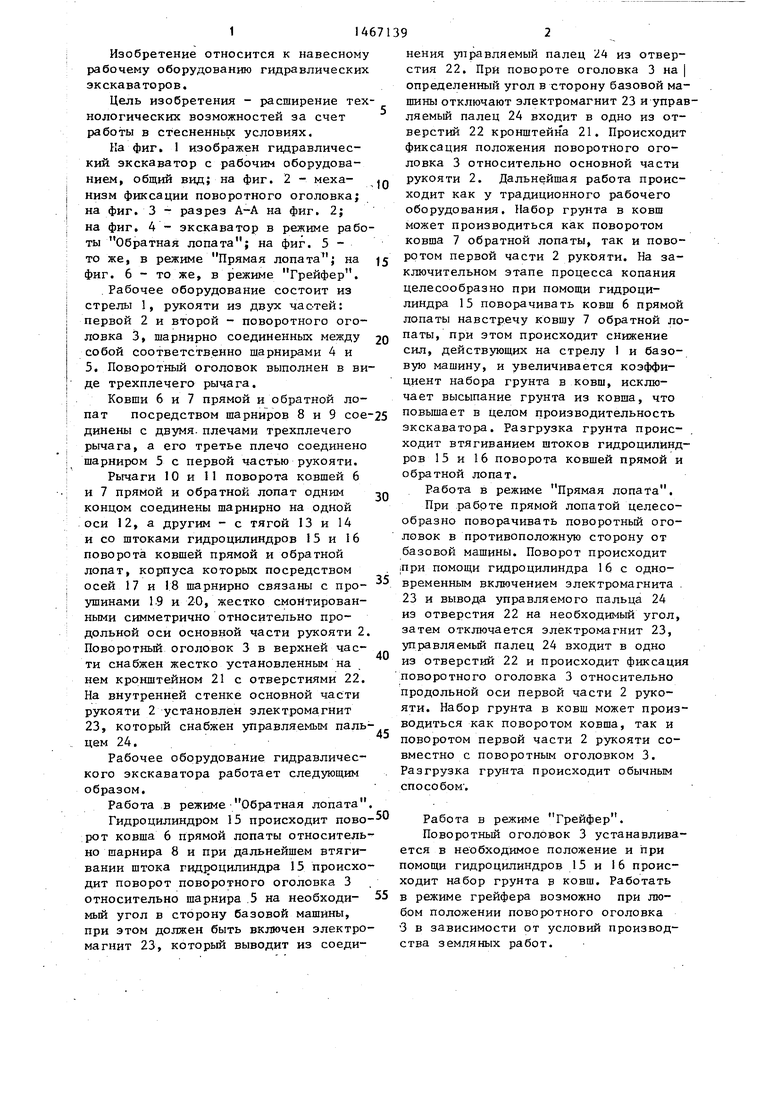
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1714047A1 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА НА ПОВОРОТНОЙ КОЛОНКЕ | 2009 |
|
RU2422593C1 |
| Экскаватор | 1989 |
|
SU1726667A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР (ВАРИАНТЫ) | 2002 |
|
RU2211290C1 |
| Рабочее оборудование одноковшового гидравлического экскаватора конструкции даниленко н.д. и мещерякова а.ф. | 1976 |
|
SU673705A1 |
| Рабочее оборудование гидравлического экскаватора | 1979 |
|
SU863780A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1994 |
|
RU2047692C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
Изобретение относится к навесному рабочему оборудованию гидравлических экскаваторов. Цель - расширение технологических возможностей за счет работы в стесненных условиях. Рабочее оборудование включает стрелу 1, рукоять (Р) из двух частей 2, 3, одна из которых соединена со стрелой 1 другая часть 3 выполнена в виде трехплечего рычага. Ковши 6, 7 прямой и обратной лопат посредством шариков (Ш) 8,9 соединены с двумя плечами трехплечего рычага, третье плечо последнего соединено Ш 5 с первой частью Р. Рычаги 10, II поворота ковшей 6, 7 одним концом соединены шарнирно с осью 12, а другим - с тягой 13 и 14 и со штоками гидроцилиндров (ГЦ) 15 и 16 поворота ковшей 6, 7. Размещены ГЦ 15, 16 симметрично относительно продольной оси первой части 2 Р. Ка трехплечем рычаге установлен кронштейн с отверстиями, с которыми взаимодействует палец Р. При работе прямой лопатой набор грунта в ковш 6 может производиться как поворотом ковша, так и поворотом части 2 Р совместно с частью 3 Р. При работе в режиме грейфера часть 3 Р м.б. в любом положении в зависимости от условий производства земляных работ. Такое же управление осуществляется и при работе рабочего оборудования при вьшолнении вспомогательных работ. 1 з.п. ф-лы, 6 ил. Ш (Л 4 а со со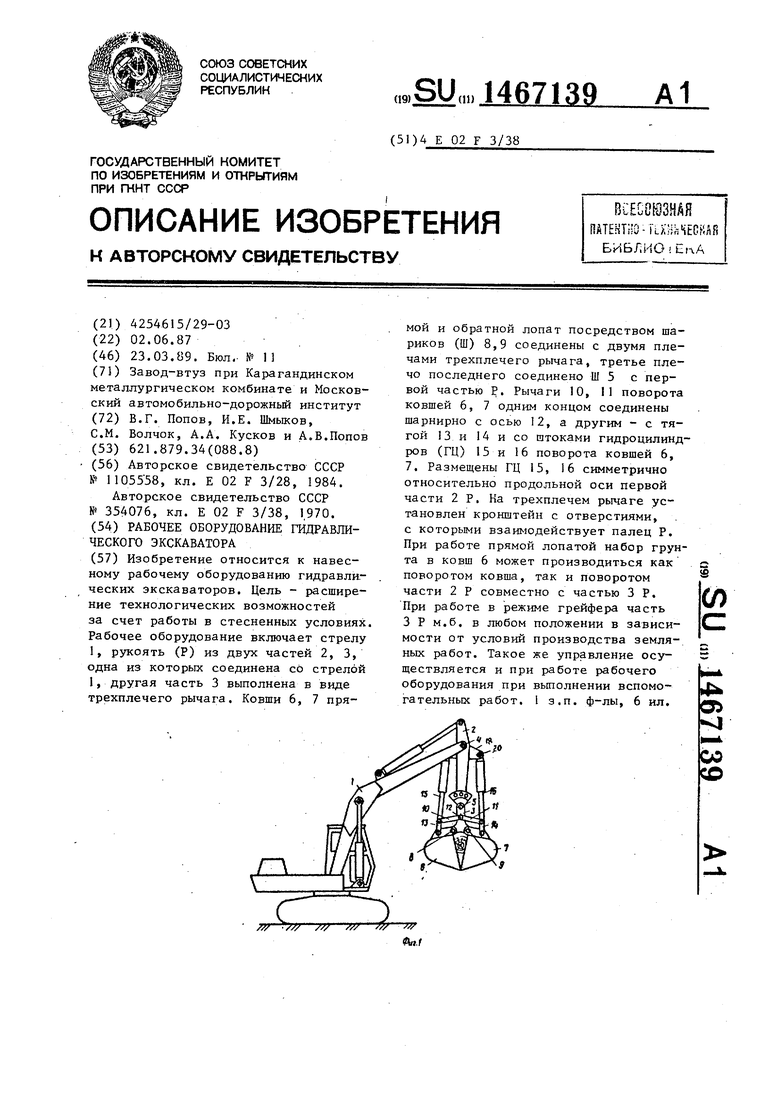
Фиг.З
ГЛ
18
75
Фиа.
г 18 16
Фиг. 5
Фие.б
| Рабочее оборудование экскаватора | 1983 |
|
SU1105558A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 0 |
|
SU354076A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
