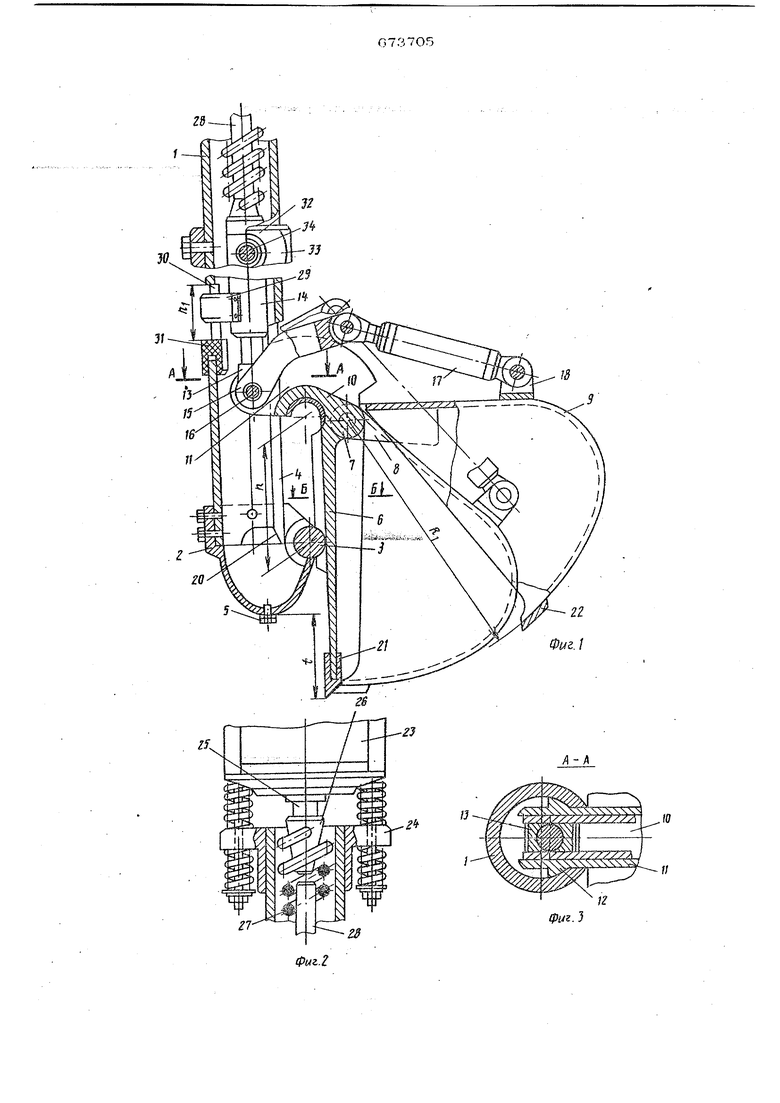
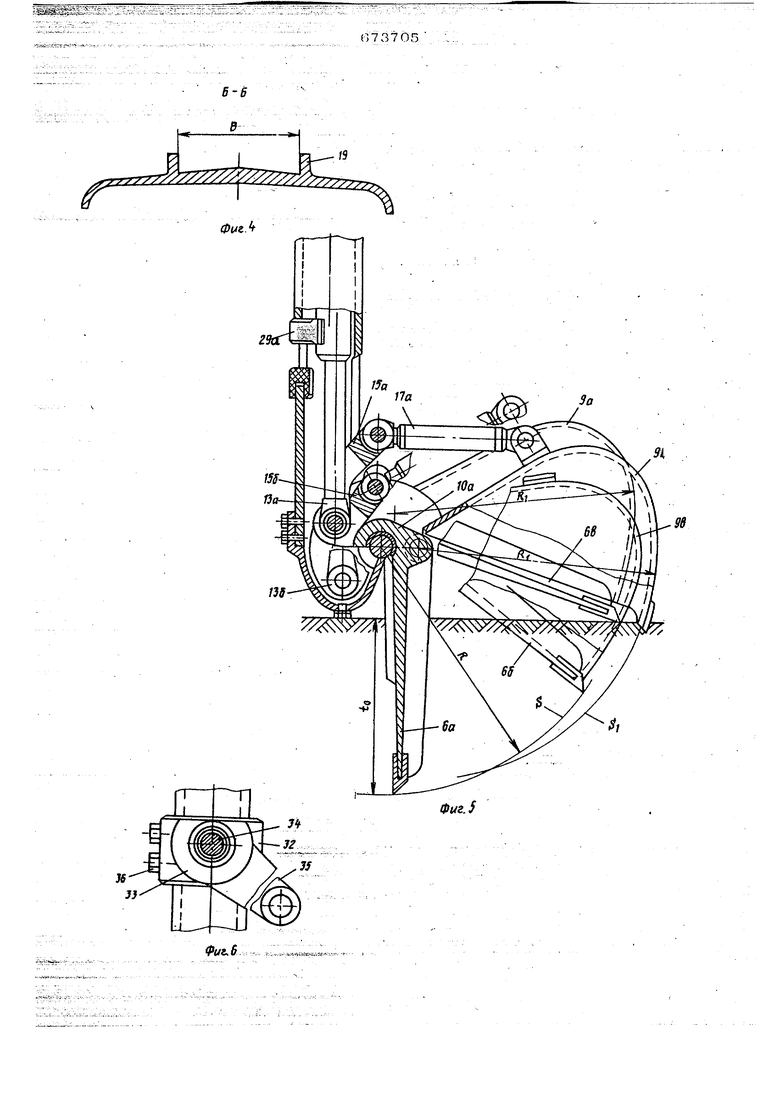
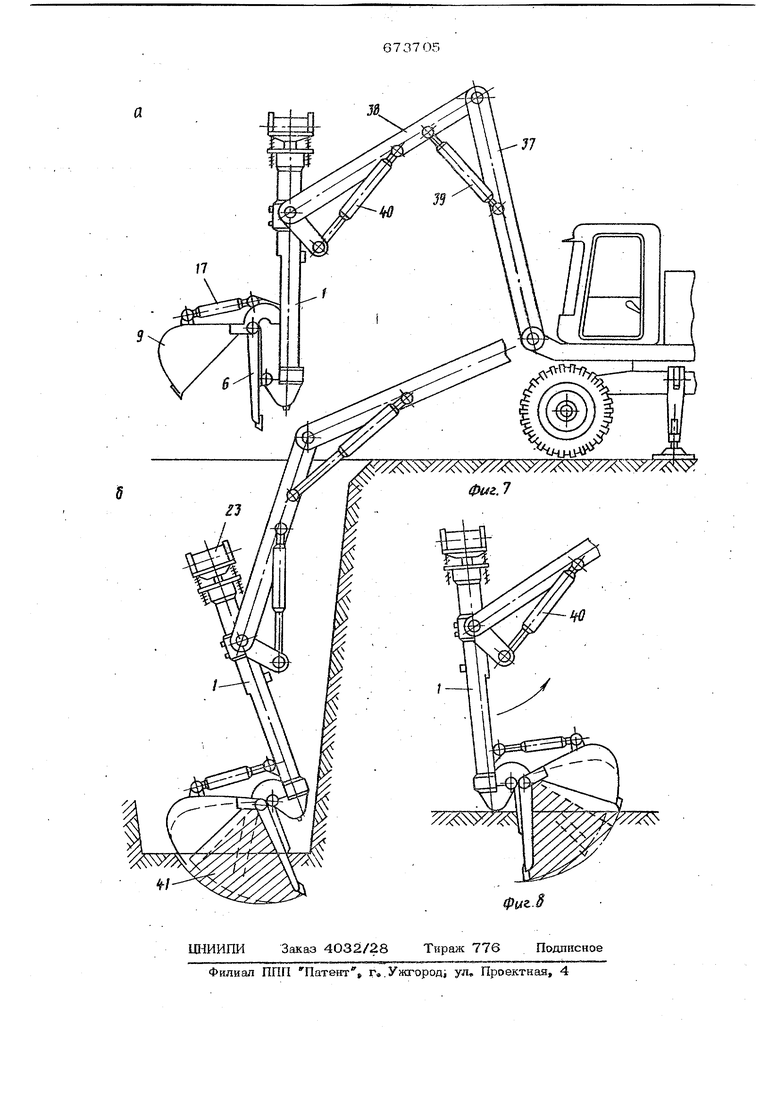
резания со сдвигом наружу и заполнением ковша. С этой целью операция наполнения ков ша путем поверхностного резания с продвижением его по поверхности забоя замененга на глубинное резание с последуюЩКЕМ сдвргом грунтового клина по криволинейной поверхности с одновременным за полнение л активно действующего ковша. Для этого режущий элемент вьтолнен в вйд& совковой лопаты и имеет гиароцилиндр его выдвижения, к которому шарнирно закреплен ковш с гидроцилиндром поворота, а в верхней части рукоять оснащена вибромолотом, кинематически связанным с режущим элементом. , На фиг. 1 - рабочее оборудование в разрезе; на фиг, 2 головная-часть рукояти, с вибромолотом; на фиг. 3 - сечение А-Афиг, Ijtta фиг, 4-сечение Б-Б фиг, 1; на фиг, В - рабочее оборудование в разрезе в рабочем состоянии; на фиг. 6 - часть рукояти с полноповоротной муфтой для крепления гуська стрелый ёе сйловогх) ци линдра; на фиг.Та - пример оснащения колесного экскаватора по схеме прямой лопаты; на фиг, -7б рабочее положение органа; на фиг. 8 - оснащение гуська стрелы экскаватора рабочим органом по схеме обратной лопаты. Конструкция рабочего органа экскаватора содержит рукоять I со съемной фасонной крышкой 2, оснащенной поворотной осью 3, вынесенной за контур прорези 4, и снабженной сливной пробкой 5 /ТоЪата 6 совкового профиля вьшолнена с развитым по ее ширине затыльником 7, к которому на папьцах и ппанках 8 закреплен грейферный ковш 9, ачасть затыльника выполнена в виде разрезной поворотной стуггацы 10 с длиной равной дпйне поворотной оси. К ступице приваре ны две направляющиа шеки 11, плоскости которых частью размещёны внутри полости рукояти в снабжены ограничителям поворота 12, выполненными заодно со щеками. Соединяются щеки с проутииной 13 штока силового цилиндра 14 совмест но с вилочным поводком 15 выбивным пальцем 16 (при снятой крьпике 2). Выс тупающий за контур прорези конец поводка с проугштной соединяется пальцем с проушиной штока силового цилиндра 17 подъема-опускания грейфера, снабженного с проушишй 18. Для предотвращения перескоков лопата на тыльной поверхности снаёжена направл5псщими ребрами заплечиками 19 с раалером в между ними. авным длине поворотной оси по сводной посадке, одновременно ребра служат для повышения жесткости лопаты. Дтя исключения заедакия ограничителей поворота щек при выходе их из движения поворота и установке для направленного движения вверх (на величину h ) на торцах стени, примыкающих к прорези изнутри выполнены фаски 20. На конце лопата оснашена режущ.еЦ составной кромкой 21, а рейфер - кромкой 22, Тонким контуром показано транспортное положение грейфера.. Для работы на плотных грунтах рабочее оборудование оснашено вибромолотом , 23, закрепленным на съемном цоворотном оголовке 24, установленным на конне рукояти. Ударник 25 вибромолота соединен на резьбе с переходником 26, к которому, присоединена пружина27, служащая подвеской силоёого цилиндра лопаты. Нижний конец пружины соединен, с крыижой корпуса цилиндра, к которой с возможностью регулирования .зазора между ударной частью переходника закреплена ударная штанга 28, Ограниченное направленное возвратно-поступательное движение, корпуса силового цилиндра 14 лопаты обеспечивается огра1шчитечем хода 29, размещенного в прорези ЗО, нижняя торцовая кромка которой оборудована резино-металлическиМ демпфером 31. Длина прорези hj определяется исходя из упругих свойств пружинной подвески, и рабочих характеристик вибромолота, а зазор между верхней торцовой кромкой прореви и ограшгйтелем хода не должен превыщать зазора между штангой и переходником. Для закрет1ления рабочего органа к гуську стрелы экскаватора служит полноповоротная муфта 32 .с лысками 33 и пальцами 34. В нижней части муфты заодно выполнен кронштейн 35 с проушиной для крепления штока силового цилиндра гуська. Крепится муфта болтами 36, для которых по периметру рукояти выполнен ряд гнезд с воа тожностью разворота муфты на 90 , Работает рабочий орган следуюшим образом. Грейферный ковш 9 из транспортного .положения с помошью силового цилиндра 17 открьгеается с возможной в свободном состоянии полнотой. Лопата 6 с помощью сипового ципинд : 14 попнимается 1& крайнее вфх1нее положение (лезвие лопаты выступает на величину i }, при этом с ловой цилиндр своСюдно подвешен на ripy жинной подвеске 27, В начале рабочего цикла производится заглубление лопаты 6 на глубину t в положение 6а (фиг. 6) при силовом пе ремещении штока с проушиной в положени 13а. Нож ковша 9 при этом опирается н плотный грунт в попожение 9а. Заглублению способствует работа вибромолота 23 и опускание гуська стрелы экскаватора д упора крышки 2 рукояти 1 на грунт. Дальнейшая работа силового цилиндра 14 вызывает перемещение проушины штока в положение 136 и совместное радиальное перемешение с пальцем 16 проушкн щек 11 и поводка из положения 15а в положение 156, и связанный с этим, поворот разрезной ступицы Ю вокруг ос 3 и совместный поворот лопаты из .положения 6а (с промежуточным положением 66) в конечное попожение 6в. Работа ков ша 9 при этом (плотный грунт) будет заключаться в формировании объема грунта с частичным загпубпением режушей кромки в попожение 96. На грунтах средней плотности и рыхлых смыкание ковша с попатой происходит ниже дневной поверхности и определится, например, их позициями 66 и 9в. При работе на сггабых груитах возможно заполнение ковша без поворота лопаты а только лишь при рабо. те силового цилиндра 17. При повороте лопаты ее режушая кромка описывает дугу с радиусом (фиг. б) а кромка ковша - .дугу с; радиусом RI (фиг. l). Соответствующие им поверхности резания S и 5л близки к поверхности сдвига грунтового клина отпора, что обеспечивает оптимальный режим работы лопаты и грейфера. Таким образом, рабочий цикл у рабочего органа происходит без .. планового перемещения рукояти, на четко ограниченной плошади забоя. Далее следует цикл выгрузки, при котором рукоять поднимается из забоя вертикально (с небольшим наклоном в зависимости от типа оснащения: прямой или обратной лопатой) и в таком положении перемеш ется к месту разгрузки. Для разгрузки ковша, в обшем случае, в работе включается цилиндр 14, обеспечивающий возврат попаты в исходное положение (фиг. 1/. Воэ,. .вратное движение лопаты для сокращения времени цикла разгрузки выпопняется в процессе перемещения органа от забоя, Над местом разгрузки в работу включает ся цилиндр 17, раскрывающий ковш 9, как показано на фиг. 1. бергикапьносгь лопаты и большой наклон передней поверхности: ковша обеспечивает полную выгрузку грунта. .Далее из этого положения цикл рабочего органа повторяется. Дпя рыхления поверхности грунта рукоять помещается на высоте несколько большей величины рыхление производится лопатой при совместном действии силового цилиндра 14 и вибромолота 23 с плановым перемеи1еНием рукояти в месте намеченного забоя. Во всех случаях работы, когда сопротивление грунта резанию превзойдет величину сжатия пружины 27,силовой цилиндр 14 переместится вверх и ограничитель хода 29 займет крайнее верхнее положение, поз. 29а, фиг. 6. При этом штанга 28 верхним концом соприкоснется с переходником 26, который с этого момента будет поджаг пружиной. Работа ударника 25 с переходником 26 будет обеспечивать при этом передачу ударной штанге, а вместе с ней и корпусу силового цилиндра 14 и его штоку смягченные пружиной высокочастотные удары. При этом возможно соударение ограничителя хода с нижней торцовой кромкой |прорези 30, снабженной демпферным элементом 31. При выемке грунта и разгрузке ковша ограничитель хода силового цилиндра предотвращает рас-, тяжение пружины, а вместе с этим и излишнюю нагрузку на ударник- вибромолота. На фиг. 7 npHBeflek пример оснащения рабочим оборудованием колесного экскаватора, оборудованного стрелой 37 с гуськом 38 и силовыми цилиндрами 39 и 4О, обычными для современных одноковшовых экскаваторов. На фиг. 7а показано взаимное положение лопаты 6 и ковша 9 с цилиндром 17 к началу работы. На фиг. 76 показан рабочий орган в работе с наклонной рукоятью 1. Работа вибромолота 23 при этом вполне допустима. Заглубление лопаты для сдвига грунтового клина 41 в этом случае до.токно быть меньше, чем при вертикальном положении рукояти. Положение рабочего органа, соответствующее работе обратной лопаты (фиг. 8), при котором рукоят 1 повернута вокруг воей оси на 180 . При гаком оснашенин кскаватора возможна работа с поворотом рукояти на себя (как показано стрелкой) помощью силового цилиндра 4 О гуська трелы.- i Для работы на оросительных каналах (при рытье траншей) большой протяжености орган устанавливается с поворотом на 90 по отношению к тгх;кости качеНй:Я Стрелы с гуськом по варианту обратной лопаты. Экскаватор при этом движется вдопь канапа (тран1иеи) на отмочентле места дпя стоянок, обеспечиваюи/ие май- бопьший выпет гуська с рукоятью. Положение рабочего органа при такой оснастке стрепы позвопяет произвопигь работы с вертикальным образом профиля забоя без изменения направпения движени экскаватора, что значительно сокращает время работ и повышает производительность механизма. Широкое применение рабочего органа может получить цпя выпопнения основных и вспомогательных работ в сельскохозяйственном производстве, для рытья колодцев, сипосных ям и траншей, расчистке еоЙбёМЬв с плавучих средств, а также пр погрузке-выгрузке удобрений навалом (особенно слежавшихся) и для забивки в грунт временных опор ограждений и опор виноградников. В последнем с-пучае грейфер и лопата снимаются с рукояти совместно с рабочим силовым цилиндром и прузкинной йЬавёской, а ударная штанга на нижнем конце оборудуется подбабком. Применение рабочего оборудования поз воляет повысить эффективность работы экскаватора, а применение в работе новы
технологических схем-сократить затрату времени и горючего и обеспечить выполнение работ в труднодоступных местах и
180, рис. 123. 2. Авторское свидетельство СССР № 171809, кл. Е 02 F З/ЗО, 1965. в стесненных забоях. Наряду с этим экскаватор, 1Х;нацен11ый предпагаемым рабочим оборудованием. может выполнять ряд необходимых в сетьскохозяйственном производстве работ, недоступных обычным экскаваторам. Формула изобретения Рабочее оборудование одноковшового гидравлического экскаватора, включаюшее. стрелу, рукоять, ковш, шарнирно прикрепленный к рукояти с возможностью поворота в вертикальной плоскости и режуший элемент на рукояти, о тличаюшее с я тем, что, с целью повышения эффективности разработки грунта путем (f резания со сдвигом наружу и заполнением ковша, режуший элемент выполнен в виде совковой лопаты, и имеет гидроцилиндр его выдвижения, к которому шарнирно закреплен ковш с гидроцилиндром поворота, а в верхней части рукоять оснащена вибромолотом, кинематически связанным с режуцзим элементом. Источники информации, принятые во внимание при экспертизе 1. Беркман И. О. и др. Одноковшовые гидравлические экскаваторы, - М., 1973,
фиг. J
(173705
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового гидравлического экскаватора | 1980 |
|
SU1000521A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1965 |
|
SU171809A1 |
| Рабочее оборудование экскаватора обратная лопата | 1977 |
|
SU751912A1 |
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ К ОДНОКОВШОВОМУ | 1968 |
|
SU210755A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР (ВАРИАНТЫ) | 2002 |
|
RU2211290C1 |
| Рабочее оборудование одноковшового экскаватора | 1989 |
|
SU1707141A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Рабочее оборудование гидравлического одноковщового экскаватора | 1975 |
|
SU653345A1 |
| Рабочее оборудование одноковшового экскаватора | 1977 |
|
SU705079A2 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
US
