Изобретение относится к землеройным машинам типа одноковшовых экскаваторов и направлено на повышение эффективности работы данных машин в узких проходах.
Известна конструкция экскаватора, содержащего поворотную платформу, шар- нирно смонтированную на ней стрелу и ковш, гидроцилиндры управления поворотом стрелы, рукоятью и ковшом в вертикальной плоскости. Стрела шарнирно смонтирована на дополнительной поворотной платформе, установленной на основной поворотной платформе, а вертикальные оси вращения основной и дополнительной поворотных платформ расположены эксцентрично.
Недостатком данной конструкции является сложность изготовления и управления в работе, так как в процессе осуществления рабочего цикла в стесненных местах необходимо осуществлять поворот обеими платформами (так называемая двойная ротация), что затрудняет работу машиниста.
Прототипом изобретения является рабочее оборудование гидравлического экскаватора, включающее портальную стрелу.на поворотной платформе, шарнирно связанную с ней рукоять, ковш, шарнирно связан- ный с рукоятью, гидроцилиндры управления портальной стрелой, рукоятью и ковшом.
Недостатком прототипа является невозможность его применения в узких проходах, так как ширина прохода не позволяет выполнить разворот платформы экскаватора при осуществлении рабочего цикла (копание грунта и разгрузка в отвал или транспорт).
Цель изобретения - расширение технологических возможностей экскаватора.
Для этого поворотная платформа экскаватора снабжена управляемыми с помощью гидроцилиндров кронштейнами, при этом гидроцилиндры управления стрелой шарнирно присоединены к свободным концам кронштейнов, а оголовок стрелы снабжен криволинейными направляющими и гидроцилиндрами, причем ось крепления рукояти к стреле снабжена роликами, закрепленными на ее концах и установленными в направ- ляющих оголовка с возможностью продольного перемещения, а ось крепления рукояти к стреле жестко присоединена к корпусам гйдроцилиндров оголовка.
При исследовании отличительных при- знаков предлагаемого технического решения не выявлено каких-либо аналогичных известных решений, касающихся использования традиционной конструкции экскаватора при реализации процесса копания и
разгрузки грунта при неподвижной поворотной платформе, позволяющих осуществить процесс разработки грунта в узких, проходах, когда ширина прохода не позволяет выполнить разворот платформы.
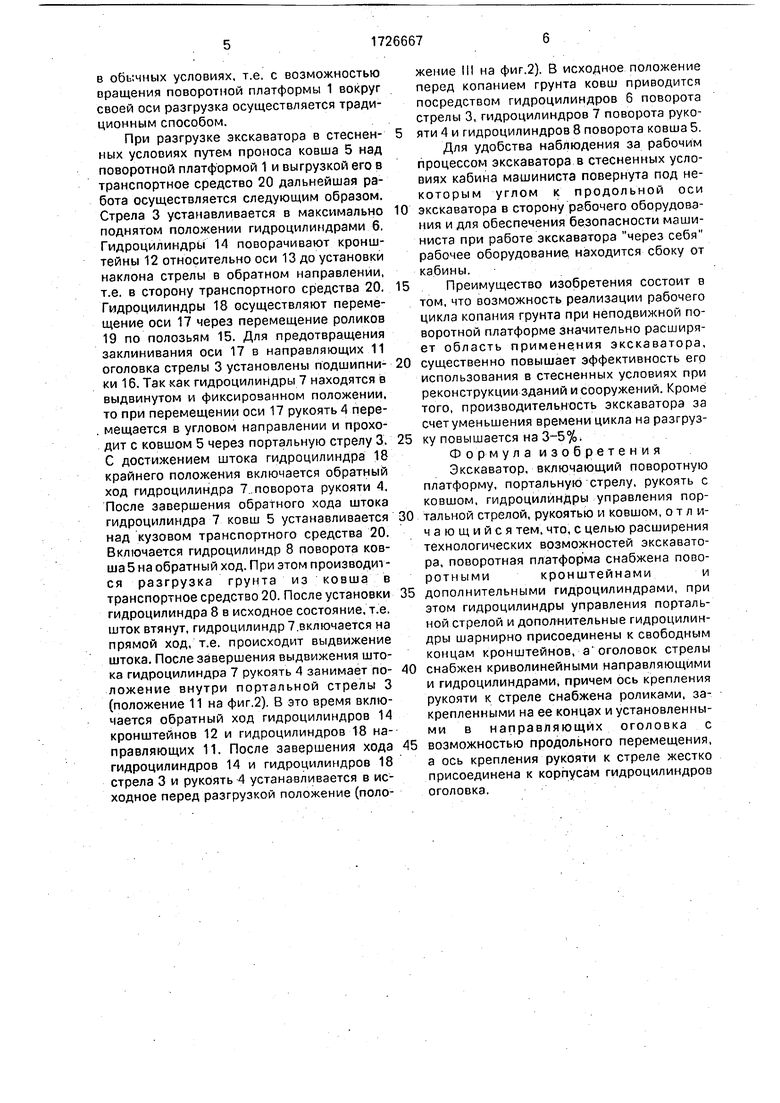
На фиг.1 показан экскаватор, вид сбоку; на фиг.2 - кинематическая схема привода стрелы, рукояти, ковша и направляющей в процессе рабочего цикла; на фиг.З - стрела,
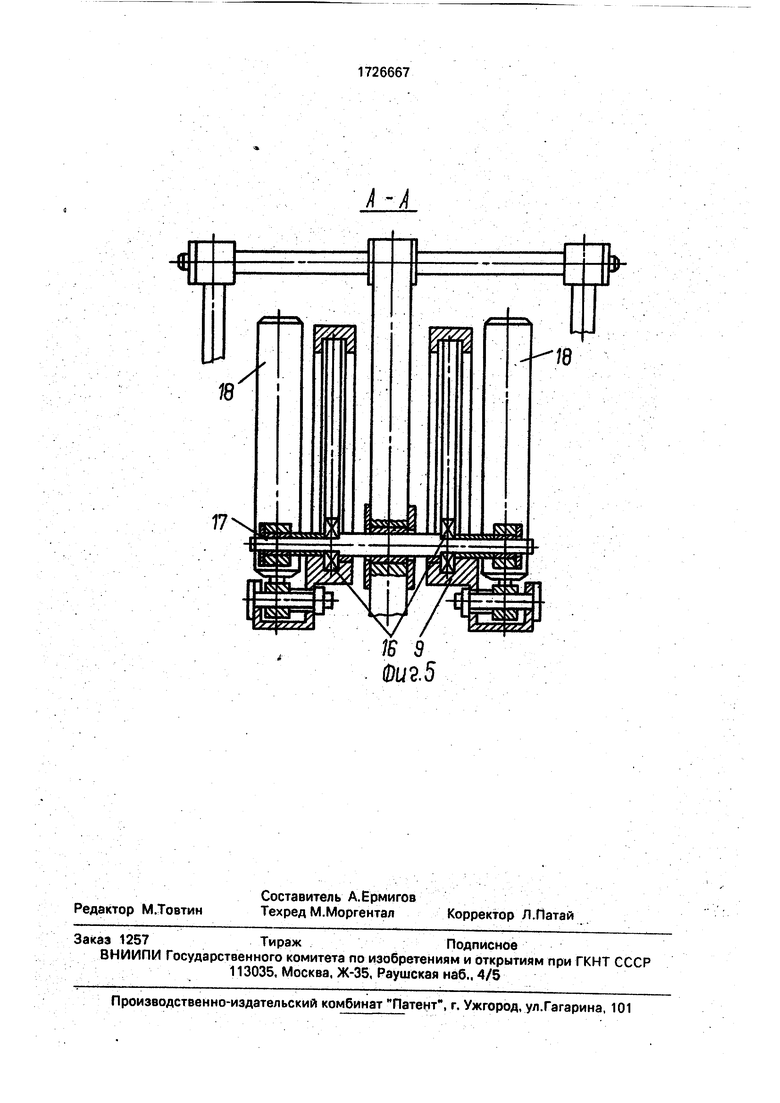
0 вид сбоку; н,а фиг.4 - то же, вид сверху; на фиг.5 - разрез А-А на фиг.З.
Экскаватор включает поворотную платформу 1, установленную на механизм хода 2. На поворотной платформе 1 шарнирно
5 смонтирована портальная стрела 3 с рукоятью А и ковшом 5, управление поворотом которых в вертикальной плоскости осуществляется соответственно гидроцилиндрами . 6,7 и 8. Оголовок портальной стрелы 3 снаб0 жен криволинейными направляющими 11 и гидроцилиндрами 18 (фиг.4). Ось крепления 17 рукояти к стреле снабжена роликами 19, закрепленными на ее концах и установленными в направляющих 11 оголовка порталь5 ной стрелы 3 с возможностью продольного перемещения по полозьям 15, обращенным выгнутой частью в сторону поворотной платформы 1 (фиг.1 и 2).
Ось крепления 17 рукояти к стреле жес0 тко присоединена к корпусам гидроцилиндров 18 оголовка стрелы 3. Гидроцилиндры 6 управления портальной стрелой 3 шарнирно закреплены на свободных концахкронш- тейнов 12, причем последние одними
5 концами шарнирно закреплены на оси 13 поворота стрелы 3 относительно поворотной платформы 1, а другими концами соеди- нены со штоками гидроцилиндров 14 кронштейнов 12. Ось 17 вращения рукояти
0 5(фиг.5)посредством подшипников установлена своими концами в полозьях 15. Разгрузка ковша 5 с грунтом осуществляется в транспортное средство 20, стоящее за экскаватором и по габаритам вписывакщееся
5 в стесненные условия.
Работа экскаватора осуществляется следующим образом.
Ковш 5 осуществляет набор грунта путем перемещения стрелы 3, рукояти 4 и ков0 ша 5 посредством гидроцилиндров 6.7 и 8 в вертикальной плоскости. После заполнения ковша 5 производится подъем его из забоя стрелой 3 при помощи гидроцилиндров 6, при этом рукоять 4 с ковшом 5 посредством
5 гидроцилиндров 7 подводится к стреле до упора, т.е. штоки гидроцилиндров 7 полностью выдвинуты. Для предотвращения высыпания грунта из ковша 5 последний удерживается в горизонтальной плоскости гидроцилиндром 8. При работе экскаватора
в обычных условиях, т.е. с возможностью вращения поворотной платформы 1 вокруг своей оси разгрузка осуществляется традиционным способом.
При разгрузке экскаватора в стеснен- ных условиях путем проноса ковша 5 над поворотной платформой 1 и выгрузкой его в транспортное средство 20 дальнейшая работа осуществляется следующим образом. Стрела 3 устанавливается в максимально поднятом положении гидроцилиндрами 6. Гидроцилиндры 14 поворачивают кронштейны 12 относительно оси 13 до установки наклона стрелы в обратном направлении, т.е. в сторону транспортного средства 20. Тидроцилиндры 18 осуществляют перемещение оси 17 через перемещение роликов 19 по полозьям 15. Для предотвращения заклинивания оси 17 в направляющих 11 оголовка стрелы 3 установлены подшипни- ки 16. Так как гидроцилиндры 7 находятся в выдвинутом и фиксированном положении, то при перемещении оси 17 рукоять 4 перемещается в угловом направлении и проходит с ковшом 5 через портальную стрелу 3. С достижением штока гидроцилиндра 18 крайнего положения включается обратный ход гидроцилиндра 7.. поворота рукояти 4. После завершения o6patHoro хода штока гидроцилиндра 7 ковш 5 устанавливается над кузовом транспортного средства 20. Включается гидроцилиндр 8 поворота ковша 5 на обратный ход. При этом производит- ся разгрузка грунта из ковша в транспортное средство 20. После установки гидроцилиндра 8 в исходное состояние, т.е. шток втянут, гидроцилиндр 7.включается на прямой ход, т.е. происходит выдвижение штока. После завершения выдвижения штока гидроцилиндра 7 рукоять 4 занимает по- ложение внутри портальной стрелы 3 (положение 11 на фиг.2). В это время включается обратный ход гидроцилиндров 14 кронштейнов 12 и гидроцилиндров 18 направляющих 11. После завершения хода гидроцилиндров 14 и гидроцилиндров 18 стрела 3 и рукоять 4 устанавливается в исходное перед разгрузкой положение (положение III на фиг.2). В исходное положение перед копанием грунта ковш приводится посредством гидроцилиндров 6 поворота стрелы 3, гидроцилиндров 7 поворота рукояти 4 и гидроцилиндров 8 поворота ковша 5.
Для удобства наблюдения за рабочим процессом экскаватора в стесненных условиях кабина машиниста повернута под не- которым углом к продольной оси экскаватора в сторону рабочего оборудования и для обеспечения безопасности машиниста при работе экскаватора через себя рабочее оборудование, находится сбоку от кабины.
Преимущество изобретения состоит в том, что возможность реализации рабочего цикла копания грунта при неподвижной поворотной платформе значительно расширяет область применения экскаватора, существенно повышает эффективность его использования в стесненных условиях при реконструкции зданий и сооружений. Кроме того, производительность экскаватора за счет уменьшения времени цикла на разгрузку повышается на 3-5%
Формула изобретения
Экскаватор, включающий поворотную платформу, портальную стрелу, рукоять с ковшом, гидроцилиндры управления портальной стрелой, рукоятью и ковшом, отличающийся тем. что, с целью расширения технологических возможностей экскаватора, поворотная платформа снабжена поворотнымикронштейнамиидополнительными гидроцилиндрами, при этом гидроцилиндры управления портальной стрелой и дополнительные гидроцилиндры шарнирно присоединены к свободным концам кронштейнов, а оголовок стрелы снабжен криволинейными направляющими и гидроцилиндрами, причем ось крепления рукояти к стреле снабжена роликами, закрепленными на ее концах и установленными в направляющих оголовка с возможностью продольного перемещения, а ось крепления рукояти к стреле жестко присоединена к корпусам гидроцилиндров оголовка.
К -А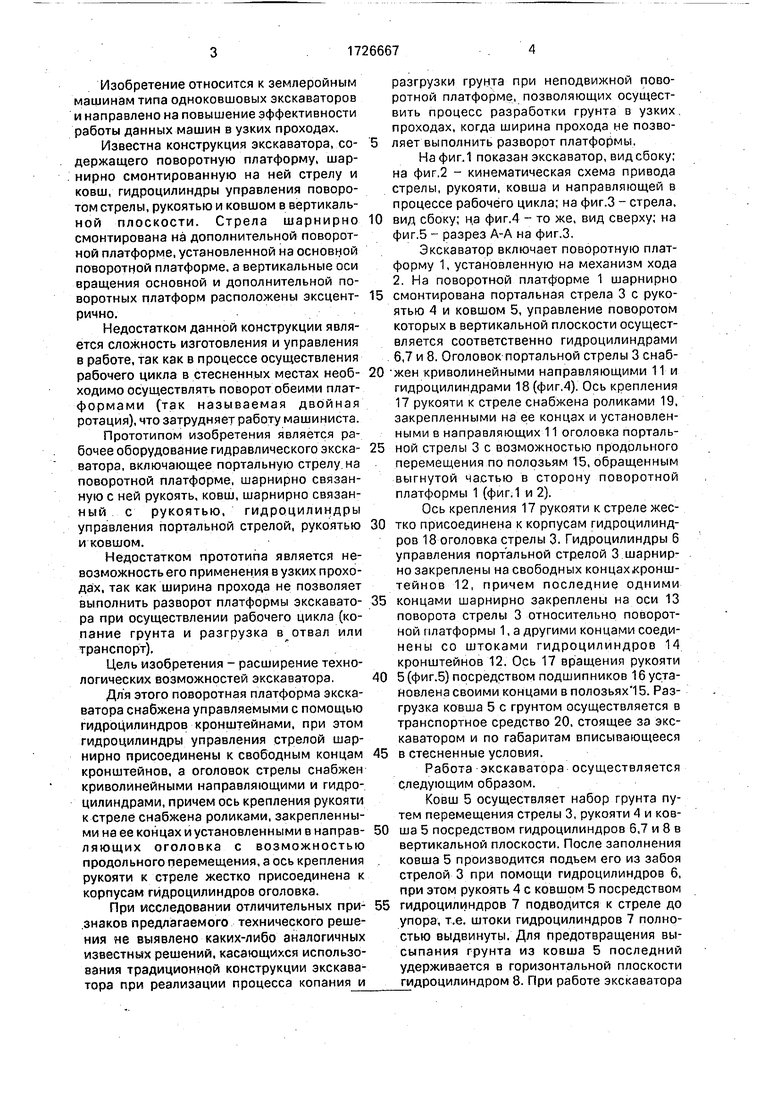
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование гидравлического экскаватора | 1987 |
|
SU1467139A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Рабочее оборудование гидравлического экскаватора | 1982 |
|
SU1081291A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1320341A1 |
| Рабочее оборудование одноковшового экскаватора | 1987 |
|
SU1447988A2 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА НА ПОВОРОТНОЙ КОЛОНКЕ | 2009 |
|
RU2422593C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
| Рабочее оборудование гидравлического экскаватора | 1981 |
|
SU1008362A1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ КОВША КАНАТНОГО КАРЬЕРНОГО ЭКСКАВАТОРА И РАБОЧЕЕ ОБОРУДОВАНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485317C2 |
Изобретение относится к одноковшовым экскаваторам и направлено на повышение эффективности работы экскаватора в стесненных условиях. Цель - расширение технологических возможностей экскаватора. На поворотной платформе (П) 1 шарнир- но смонтирована портальная стрела (ПС)3 с рукоятью (Р) 4 и ковшом 5, управление поворотом которых в вертикальной плоскости осуществляется соответственно гидроцилиндрами 6, 7 и 8. Гидроцилиндры 6 поворота ПС 3 щарнирно закреплены на поворотных . кронштейнах 12, которые шарнирно закреплены на оси 13 поворота ПС 3 относительно П 1 и шарнирно соединены со штоками дополнительных гидроцилиндров 14, шарнирно закрепленных на поворотной П 1. На оголовке 9 ПС 3 установлены направляющие 10, которые выполнены & виде криволинейных полозьев. В полозьях посредством подшипников установлена ось Р 4. Штоки гидроцилиндров перемещения оси с Р 4 по полозьям шарнирно связаны с оголовком 9 ПС 3. Разгрузка ковша 5 с грунтом осуществляется в транспортное средство 11, стоящее за экскаватором и по габаритам вписывающееся в стесненные условия. 5 ил. л С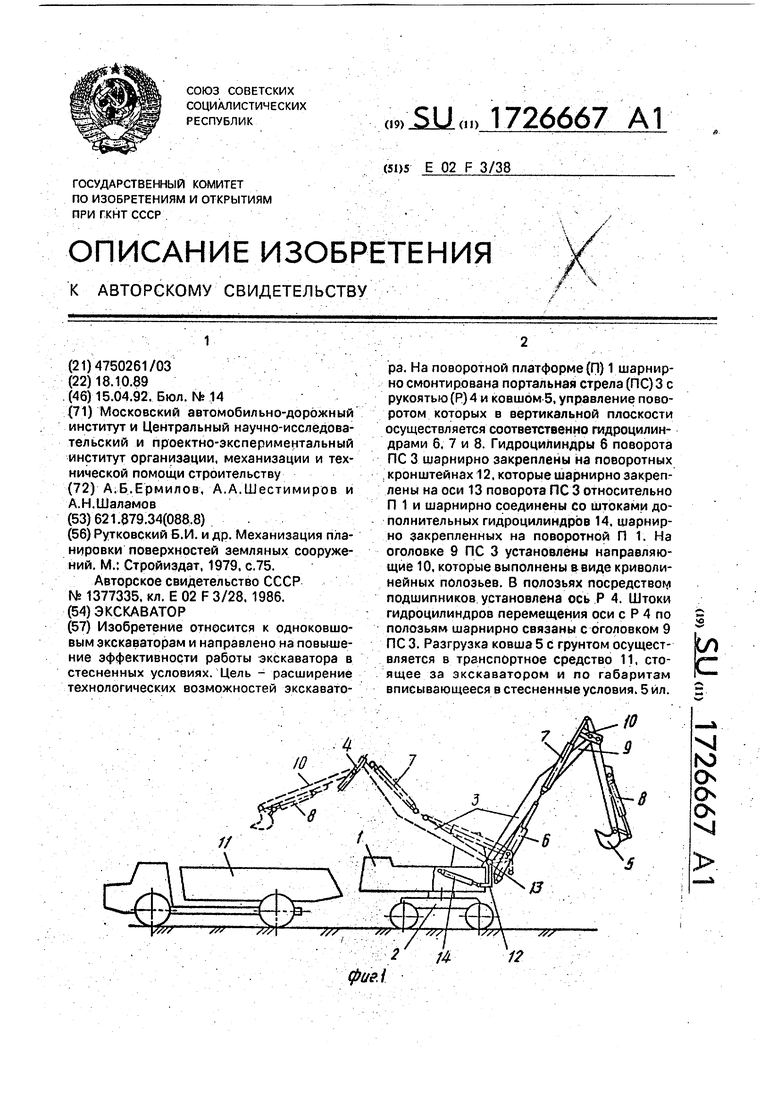
| Рутковский Б,И | |||
| и др | |||
| Механизация планировки поверхностей земляных сооружений, М.: Стройиздат, 1979, с.75 | |||
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1377335A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
