14)
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для моделирования нагрузок рабочих органов машин непрерывного действия | 1986 |
|
SU1388517A1 |
| Стенд для испытания машин ударного действия | 1986 |
|
SU1392419A1 |
| Стенд для испытаний рабочего оборудования трактора | 1987 |
|
SU1490543A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2000 |
|
RU2196088C2 |
| Нагружатель | 1987 |
|
SU1439435A1 |
| Стенд для испытания землеройной машины с фрезерным рабочим органом | 1988 |
|
SU1553877A1 |
| Стенд для испытания бульдозера с гусеничным движителем | 1988 |
|
SU1727017A1 |
| Стенд для испытаний одноковшовых экскаваторов | 1987 |
|
SU1469032A1 |
| Стенд для испытания ролика конвейера | 1980 |
|
SU952700A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ И ИССЛЕДОВАНИЯ РАБОЧИХ ОРГАНОВ ДЛЯ БЕСТРАНШЕЙНОЙ ЗАМЕНЫ ТРУБОПРОВОДОВ | 2006 |
|
RU2318196C1 |
Изобретение относится к области машиностроения и может быть использовано для моделирования рабочих нагрузок рабочих органов роторного типа. Цель изобретения - расширение функциональных возможностей путем приближения условий испытаний к эксплуатационным. Стенд содержит рабочий орган 1 с роликами 2, взаимодействующими с нагружателями 3. Последние соединены с электромагнитами (ЭМ) 6 и 7, катушки которых через последовательно соединенные коммутирующие контакторы и усилитель 8 подключены к генератору 9 случайных импульсов. При работе стенда ролики 2 взаимодействуют с нагружателями 3, которые осуществляют возвратно-поступательное движение под действием ЭМ 6 и 7 как независимо друг от друга, так и синхронно. Независимое включение ЭМ 6 и 7 осуществляется при их подключении через усилитель 8 к генератору 9. Такое включение позволяет имитировать процесс резания грунтового массива режущими элементами рабочего органа 1 с различными расстояниями между ними. 2 ил.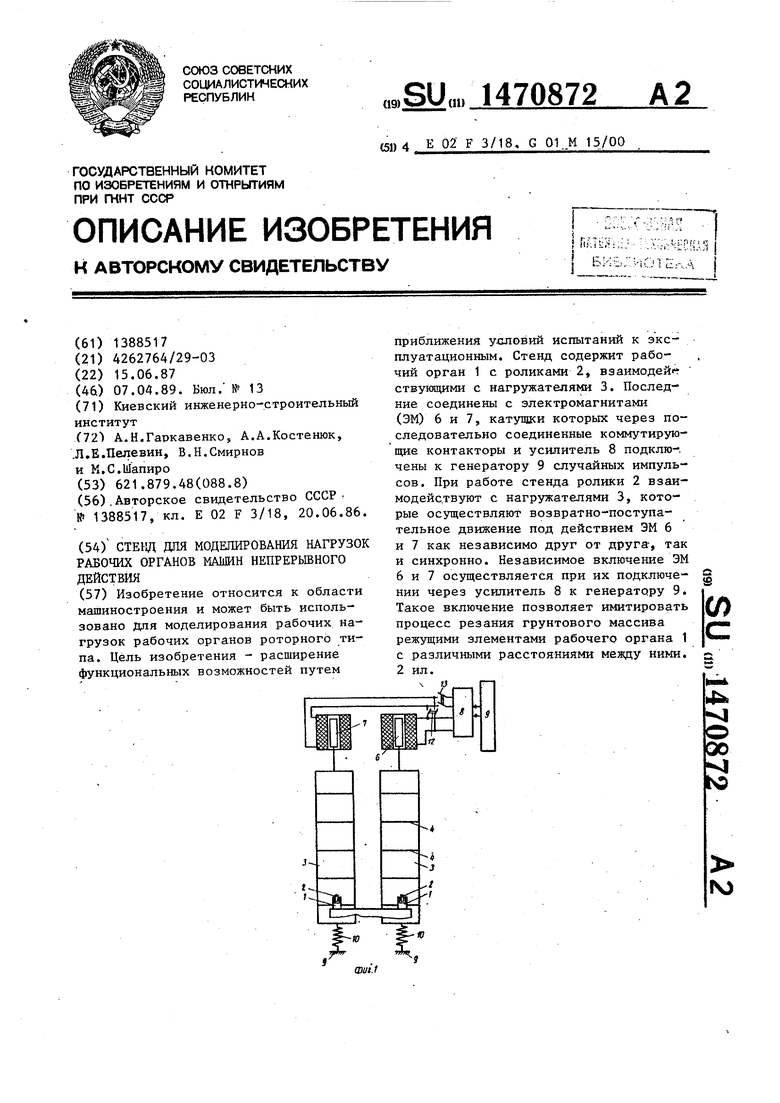
J .
Wat.f
Изобретение относится к машино- чем оба нагружателя 3 возвратно-по- строению, а именно к испытательной ступательные движения совершают по технике, может быть использовано для случайному закону как независимо друг моделирования рабочих нагрузок рабочих- от друга, так и синхронно за счет
включения электромагнитов 6 и 7 через усилитель 8, соединенный с генератором случайных импульсов, который обеспечивает возвратно-поступательное 10
органов роторного типа и является усовершенствованием изобретения по авт. св. № 1388517.
Целью данного изобретения является расширение функциональных возможностей путем приближения условий испытаний к эксплуатационным.
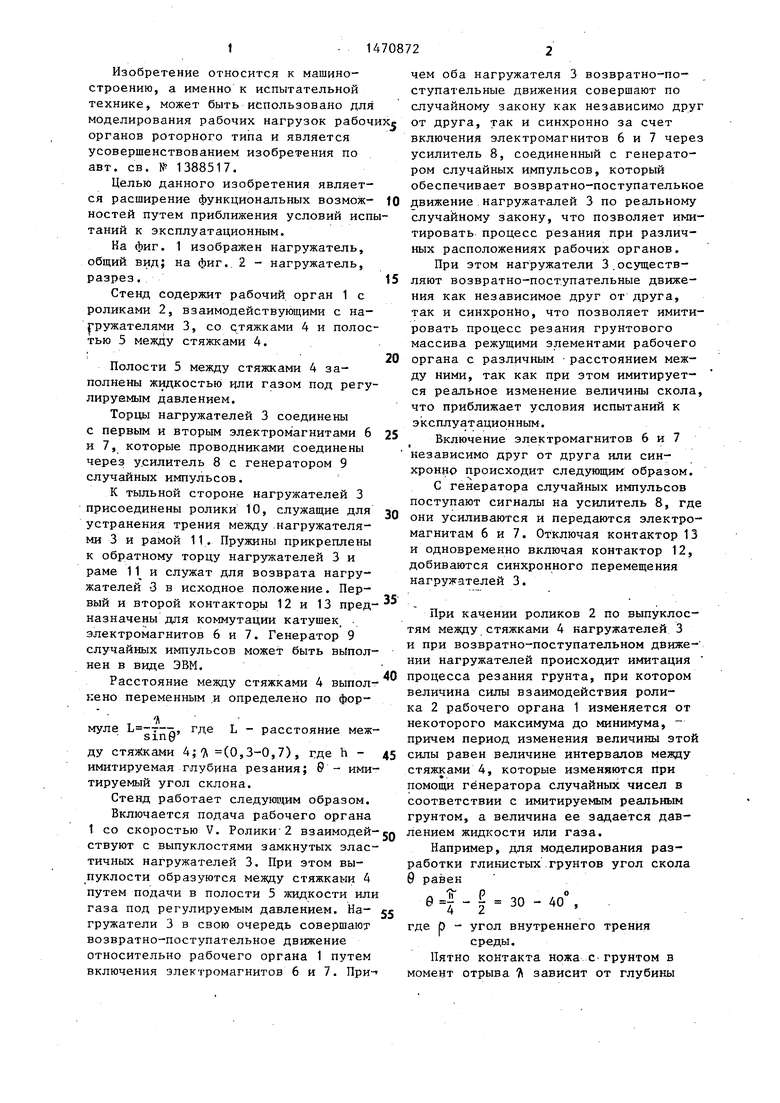
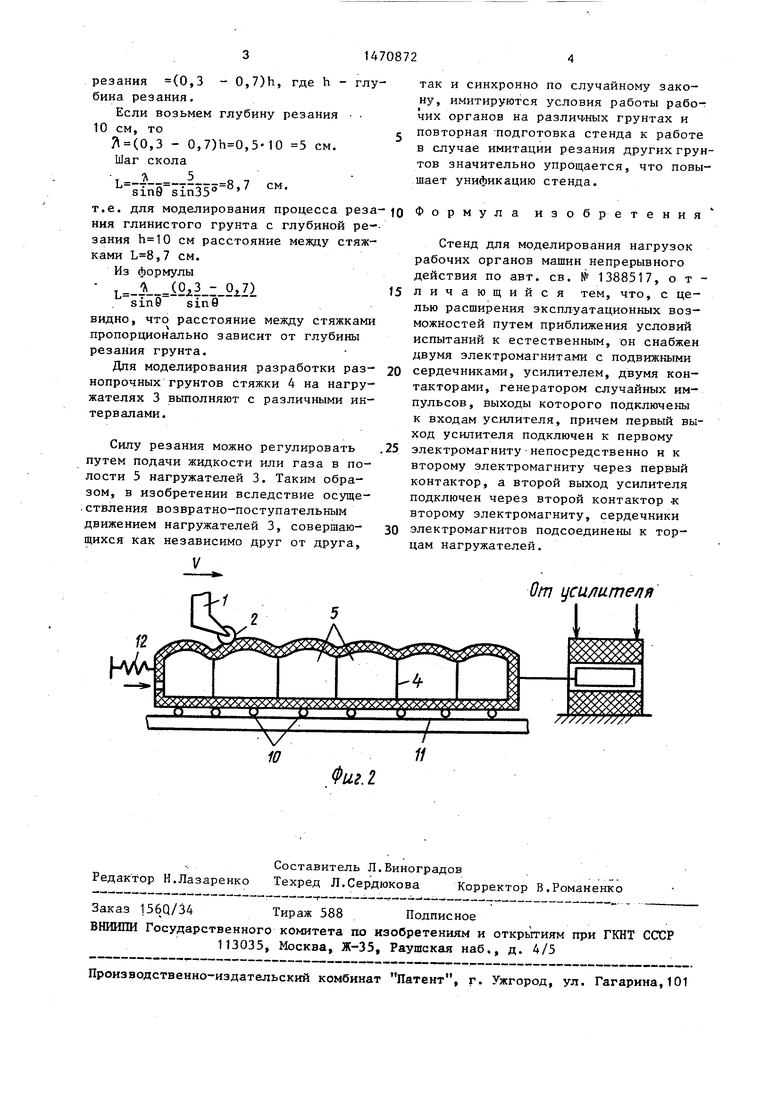
Ка фиг. 1 изображен нагружатель, общий вид; на фиг.. 2 - нагружатель, разрез.15
Стенд содержит рабочий орган 1 с роликами 2, взаимодействующими с на- ружателями 3, со стяжками 4 и полостью 5 между стяжками 4.
движение нагружаталей 3 по реальному случайному закону, что позволяет имитировать процесс резания при различных расположениях рабочих органов.
При этом нагружатели 3.осуществляют возвратно-поступательные движения как независимое друг от друга, так и синхронно, что позволяет имитировать процесс резания грунтового массива режущими элементами рабочего органа с различным расстоянием между ними, так как при этом имитируется реальное изменение величины скола, что приближает условия испытаний к эксплуатационным.
Полости 5 между стяжками 4 заполнены жидкостью или газом под регулируемым давлением.
Торцы нагружателей 3 соединены с первым и вторым электромагнитами 6 и 7, которые проводниками соединены через усилитель 8 с генератором 9 случайных импульсов.
К тыльной стороне нагружателей 3 присоединены ролики 10, служащие для устранения трения между нагружателя- ми 3 и рамой 11, Пружины прикреплены к обратному торцу нагружателей 3 и раме 11 и служат для возврата нагружателей -3 в исходное положение. Первый и второй контакторы 12 и 13 предназначены для коммутации катушек . электромагнитов 6 и 7. Генератор 9 случайных импульсов может быть выполнен в виде ЭВМ.
Расстояние между стяжками 4 выпол- кено nepeMeHiibiM и определено по фор Лп0
L - расстояние между стяяйсами 4; Л (0,3-0,7), где h - имитируемая глубина резания; S - имитируемый угол склона.
Стенд работает следуюидим образом.
Включается подача рабочего органа 1 со скоростью V. Ролики-2 взаимодействуют с выпуклостями замкнутых эластичных нагружателей 3. При этом выпуклости образуются между стяжками 4 путем подачи в полости 5 жидкости или газа под регулируемым давлением. На- гружатели 3 в свою очередь совершают возвратно-поступательное движение относительно рабочего органа 1 путем включения электромагнитов 6 и 7. При-
включения электромагнитов 6 и 7 через усилитель 8, соединенный с генератором случайных импульсов, который обеспечивает возвратно-поступательное 0
5
5
0
движение нагружаталей 3 по реальному случайному закону, что позволяет имитировать процесс резания при различных расположениях рабочих органов.
При этом нагружатели 3.осуществляют возвратно-поступательные движения как независимое друг от друга, так и синхронно, что позволяет имитировать процесс резания грунтового массива режущими элементами рабочего органа с различным расстоянием между ними, так как при этом имитируется реальное изменение величины скола, что приближает условия испытаний к эксплуатационным.
Включение электромагнитов 6 и 7 независимо друг от друга или синхронно происходит следующим образом.
С генератора случайных импульсов поступают сигналы на усилитель 8, где они усиливаются и передаются электромагнитам 6 и 7. Отключая контактор 13 и одновременно включая контактор 12, добиваются синхронного перемещения нагружателей 3.
При качении роликов 2 по выпуклостям между стяжками 4 нагружателей 3 и при возвратно-поступательном движе- НИИ нагружателей происходит имитация процесса резания грунта, при котором величина силы взаимодействия ролика 2 рабочего органа 1 изменяется от некоторого максимума до минимума, причем период изменения величины этой силы равен величине интервалов между стяжками 4, которые изменяются при помощи генератора случайных чисел в соответствии с имитируемым реальным грунтом, а величина ее задается давлением жидкости или газа.
Например, для моделирования разработки глинистых .грунтов угол скола 0 равен
30 - 40°,
д Р
С -т гГ
4 2 где р - угол внутреннего трения
среды.
Пятно койтакта ножа с грунтом в момент отрыва Л зависит от глубины
резания (0,3 - 0,7)h, где h бина резания.
Если возьмем глубину резания 10 см, то
7 (0,3 - 0,7),5-10 5 см.
Шаг скола Л 5
тi - о -,
sinQ sin35°
см.
т.е. для моделирования процесса реза ния глинистого грунта с глубиной резания см расстояние между стяжками ,7 см. Из формулы
L - - - 2i2-::-5iZl
. sin9 sin9
видно, что расстояние между стяжками пропорционально зависит от глубины резания грунта.
Для моделирования разработки раз- нопрочных грунтов стяжки 4 на нагру- жателях 3 вьтолняют с различными интервалами.
Силу резания можно регулировать путем подачи жидкости или газа в полости 5 нагружателей 3. Таким образом, в изобретении вследствие осуще- ствления возвратно-поступательным движением нагружателей 3, совершаю- щихся как независимо друг от друга,
м
так и синхронно по случайному закону, имитируются условия работы рабочих органов на различных грунтах и повторная подготовка стенда к работе в случае имитации резания других грунтов значительно упрощается, что повышает унификацию стенда.
10 Формула изобретения
Стенд для моделирования нагрузок рабочих органов машин непрерывного действия по авт. св. № 1388517, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем приближения условий испытаний к естественным, он снабжен двумя электромагнитами с подвижными сердечниками, усилителем, двумя контакторами, генератором случайных импульсов , выходы которого подключены к входам усилителя, причем первый выход усилителя подключен к первому электромагниту непосредственно и к второму электромагниту через первый контактор, а второй выход усилителя подключен через второй контактор « второму электромагниту, сердечники электромагнитов подсоединены к торцам нагружателей.
Qtn усилителя
LI
| Стенд для моделирования нагрузок рабочих органов машин непрерывного действия | 1986 |
|
SU1388517A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
