fjlfUS.f
Изобретение относится к электротехнике и может быть использовано для управления выпрямителем в источнике электропитания постоянного тока и является усовершенствова.нием изобретения по авт.св. № 1376196,
Целью изобретения является улучшение качества стабилизации выходного напряжения выпрямителя в переходных режимах при коммутации нагрузки и повышение нагрузочной способности выпрямителя.
На фиг.1 приведена функциональная схема.устройства, реализующего предлагаемый способ; на фиг.2 и 3 - диаграммы, поясняющие его работу.
Устройство (фиг.1) содержит источник 1 эталонного напряжения, выход которого через первый вход румматора 2 подключен к первому входу интегратора 3. Второй и третий входы интегратора 3 соединены с выходами ограничителей 4 и 5, а его выход подключен к первому входу второго сумматора 6. Выход первого сумматора 2 чере усилитель-ограничитель 7 подключен к второму входу второго сумматора 6, а его третий вход подключен к выходу второго источника 8 эталонного напряжения. Выход второго сумматора 6 через первый вход третьего ограничителя 9 подключен к управляющему входу блока 10 компараторов. Второй вход блока 10 компараторов соединен с выходом блока 11 генераторов опорного напряжения, вход которого подключен к первичному источнику питания 12. Выход блока 10 компараторов через блок 13 выходных каскадов соединен с управляющим входом выпрямителя 14, силовой вход которого подключен к первичному источнику 12 питания. Выход выпрямителя 14 через силовой фильтр 15 подключен к нагрузке 16 и соединен с вторым входом первого сумматора 2.
Способ осуществляется следующим образом.
Источник 1 формирует сигнал задания выходного напряжения выпрямителя 14. Выходное напряжение, сглаженное силовым фильтром 15, вычитается из сигнала задания сумматора 2, и на его выходе формируется сигнал разности, который поступает на вход интегратора 3 и усилителя-ограничителя 7. Интегратор 3 интегрирует сигнал разности сумматора 2, являющийся
5
0
5
0
5
0
5
0
5
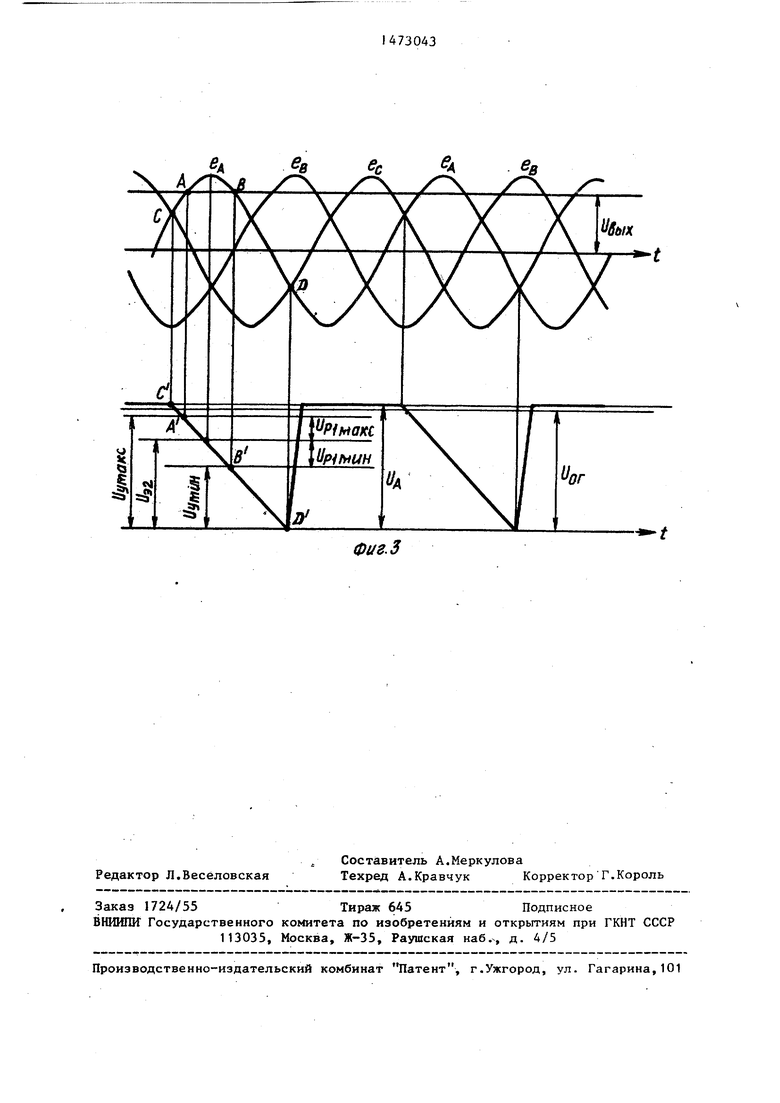
сигналом ошибки U (фиг.2), и изменяет свое выходное напряжение в зависимости от знака сигнала разности в диапазоне, определяемом ограничителями 4 и 5. На выходе интегратора 3 формируется первый регулирующий сигнал (Up,), который суммируется с эталонным сигналом источника 8. Напряжение источника 8 (и,,фиг.З) формируется равным среднему арифметическому наибольшего и наименьшего значений сигнала управления выпрямителем 14, поступающим на первый вход блока 10 в установившихся режимах работы выпрямителя 14 с минимальной и максимальной нагрузкой 16. Суммирование напряжения источника 8 с первым регулирующим сигналом интегратора 3 (Up ) осуществляется с коэффициентом пропорциональности, обеспечивающим изменение сигнала управления выпрямителем от наименьшего до наибольшего измеренных значений при полном диапазоне изменения первого регулирующего сигнала. Диапазон изменения сигнала управления за счет, первого регулирующего сигнала (Up, WMH Jp MQKc фиг.2) оказьшается достаточным для стабилизации выходного напряжения вьшрямителя ( фиг.2) в установившихся режимах работы, но он менее возможного диапазона изменения сигнала управления выпрямителем, который определяется амплитудой опорных сигналов (Пд, фиг.2), формируемых в блоке 11. Ограничение диапазона изменения сигнала упраЕ1ления вьтр1р1мителем путем ограничения диапазона изменения напря- женш;г интегратора 3 и соответствую- цего выбора коэффициента пропорциональности между первым регулирующим сигналом (иу, ) и сигналом управления выпрямителем (I u) позволяет исключить перерегулирование сигнала управления, при изменении напряжения интегратора, осуществляющего относительно медленное регулирование сигнала управления, и улучшить качество стабилизации выходного напряжения по сравнению с отсутствием ограничения диапазона изменения первого регулирующего сигнала,
Однако регулирование сигнала управления выпрямителем только за счет интегрирования сигнала разности (сигнал ошибки Ujg , фиг.2) не
позволяет осуществить быстродействующее регулирование сигнала управления что приводит к отклонениям выходного напряжения в переходных режимах при коммутации нагрузки (1ц, фиг.2). Также ограничение диапазона изменения сигнала управления выпрямителем менее амплитуды опорных сигналов на уровнях, обеспечивающих стабилизацию выходного напряжения в статических режимах, приводит к ограничению диапазона изменения фазы углов управления вентилями вьтрямителя и, как следствие, к уменьщению тока КЗ в нагрузке выпрямителя, что увеличивает длительность режимой КЗ, определяемых временем сгорания предохранителей в местах КЗ нагрузки.
Для устранения указанных недостат ков формируется второй регулирующий сигнал с помощью усилителя-ограничителя 7, который пропорционален сигналу разности сигнала задания и сигнала отрицательной обратной : связи (выходного напряжения). Этот сигнал может изменяться безынерционно и обратно пропорционально изменению выходного напряжения. Ограничения диапазона изменения второго регули- рующего сигнала сверху н снизу осуществляется для задания однозначного диапазона изменения сигнала управления при изменении второго реГули-- рующего сигнала. Второй регулирующий сигнал суммируется с вторым эталонны и первым регулирующим сигналами с помощью сумматора 6, Коэффициент пропорциональности при суммировании выбирается таким, чтобы при минималь ном первом регулирующем сигнале (наиболее отрицательном напряжении интегратора 3 Up, ,,„„ , фиг.2) и максимальном втором регулирзгащем сигнале (наиболее положительном напряже- НИИ усилителя-ограничителя 7 Up2, фиг.2) выходной сигнал сумматора 6 был не менее амплитуды опорных сигналов , формируемых в блоке I1 (Ид, фиг.2). Далее выходной сигнал сумма- тора 6 проходит через ограничитель 9, который ограничивает сверху диапазон изменения сигнала управления (11„, фиг.2) на уровне, не превьшаю щем амплитуду опорных сигналов (Uor. ft, Фиг.З).
В установившемся режиме работы за счет регулирования сигнала управления выпрямителем в диапазоне от наименьшего до наибольшего измеренн значений поддерживается равгнство между сигналом задания и выходны; 1 напряжением (U, , фиг, 2). Это регулирование осуществляется за счет изменения первого регулирующего сигнала с помощью интегратора 3. За счет астатического характера регулирования, задаваемого интегратором 3, выходной сигнал сумматора 2 в установившемся режиме равен нулю, и равен нулю, соответственно, второй регули- р тощий сигнал на выходе усилителя- ограничителя 7, Поэтому при медленных изменениях нагрузки 16 регулирование сигнала управления выпрямителем осуи ествляется согласно основно- , му изобретению. При быстрых изменениях нагрузки 16, например ее сбросах и набросах, изменяется выходное напряжение на выходе силового фильтра 15 в виде изменения падения напряжения в силовом фильтре 5 и первичном -источнике 12. При появлении отклонений в переходном режиме выходной сигнал сумматора 2 становится отличным-от нуля и появляется сигнал ошибки, который воздействует на вход интегратора 3 и усиливается усилителем 7. Выходное напряжение интегратора 3 мгновенно измеьшться не может, а выходное напряжение усилителя 7 мгновенно изменяется пропорционально сигналу сумматора 2 и приводит к быстродействующему регулированию сигнала управления выпрямителем и к изменению выходного напряжения вьтрямителя 14, компенсирующему первоначальное изменение выходного напряжения фильтра 15. За счет этого уменьша:ется отклонение выходного напряжения фильтра 15 при коммутации нагрузки по сравнению с основным изобретением. Ограничение второго регулирующего сигнала (Up , фиг.2) и выбор коэффициента пропорциональности между ним и сигналом управления, позволяющего полз чить сигнал управления не менее амплитуды опорных сигналов при минимальном первом регулирующем сигнале и максимальном втором, дает возможность мгновен- ио изменить фазу импульсов управления от максимальной до минимальной при набросе любой нагрузки из режима ее холостого хода. Это позволяет уменьшить .провалы выходного напряжения при набросах нагрузки, превышающей номинальную, и повысить нагрузочную способность вьтрямителя. При возникновении КЗ нагрузки 16 даже из режима ее холостого хода также обеспечивается быстродействующее регулирование сигнала управления выпрямителем до уровня, близкого к амплитуде опорных сигналов. За счет этого обеспечивается включение вентилей выпрямителя с минимальными углами управления, что увеличивает ток КЗ выпрямителя и сокращает время отключения места КЗ. При этом повышается нагрузочная способность выпрямителя. Ограничение сигнала управления ограничителем 9 позволяет исключить превышение сигналом управления опорных сигналов при любом соотношении перво го и второго регулирующих сигналов, что исключает исчезновение импульсов управления вентилями выпрямителя 14, а также способствует повьш1ению качества стабилизации выходного напряжения в переходных процессах.
Таким образом, предлагаемый способ управления позволяет улучшить качество стабилизации выходного напряжения выпрямителя в переходных режимах и повысить нагрузочную способность выпрямителя.
Формула изобретения
Способ управления стабилизированным выпрямителем по авт.св. № 1376196, отличающийся тем, что, с целью улучшения качества стабилизации выходного напряжения выпрямителя в переходных режимах при коммутации нагрузки и повьш1ения нагрузочной способности вьтрямителя формируют второй регулирующий сигнал, пропорциональный разности сигнала задания выходного напряжения выпрямителя и сигнала отрицательной обратной связи, ограничивают диапазон изменения второго регулирующего сигнала сверху и снизу на одинаковых уровнях относительно нулевого значения, близких к величине напряжения питания, определяют амплитуду опорных сигналов, формируют сигнал управления вьтрямителем путем суммирования второго эталонного сигнала, первого регулирующего сигнала и второго регу- лирзтощего сигнала, взятого с коэффициентом пропорциональности, обеспечивающим зндчение. сигнала управления не менее амплитуды опорных сигналов при минимальном первом и максимальном BTOjiOM регулирующих сигналах, и ограничивают сверху диапазон изменения сигнала управления на уровне, не превышающем амплитуду опорных сигналов.
Фие.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизирующий источник вторичного электропитания постоянного тока | 1987 |
|
SU1473044A1 |
| Способ управления стабилизированным выпрямителем с емкостным фильтром на выходе | 1986 |
|
SU1376196A1 |
| ИСТОЧНИК ПОСТОЯННОГО НАПРЯЖЕНИЯ | 2001 |
|
RU2212745C2 |
| Способ управления активным фильтром с последовательной компенсацией | 1984 |
|
SU1169106A1 |
| Устройство для экстренной разгрузки линии электропередачи при аварийном снижении предела передаваемой мощности | 1982 |
|
SU1083286A1 |
| Способ управления стабилизированным выпрямителем | 1987 |
|
SU1453555A1 |
| Устройство компенсации мощности искажения | 1987 |
|
SU1494111A1 |
| Устройство компенсации мощности искажения | 1987 |
|
SU1494110A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Способ управления преобразователем частоты | 1984 |
|
SU1249674A1 |
Изобретение относится к электротехнике и может быть использовано для управления выпрямителем в источнике электропитания постоянного тока. Целью изобретения является улучшение качества стабилизации выходного напряжения выпрямителя в переходных режимах при коммутации нагрузки и повышение нагрузочной способности выпрямителя. С этой целью с помощью усилителя-ограничителя 7 формируют второй регулирующий сигнал, который может изменяться в определенном диапазоне, определяют амплитуду опорных сигналов в блоке 11 генераторов опорных напряжений, формируют сигнал управления путем суммирования в сумматоре 6 эталонного сигнала источника 8, сигнала с выхода интегратора 3 и сигнала с выхода усилителя-ограничителя 7 с коэффициентом пропорциональности, обеспечивающим изменение сигнала управления не менее амплитуды опорных сигналов в блоке 11 при минимальном первом и максимальном втором регулирующих сигналах. Сигнал управления ограничивают на уровне, не превышающем амплитуду опорных сигналов. 2 ил.
| Способ управления стабилизированным выпрямителем с емкостным фильтром на выходе | 1986 |
|
SU1376196A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
