Изобретение относится к электротехнике и может быть использовано для управления тиристорным стабилизированным выпрямителем, предназначенным для стабилизации уровня выхного напряжения при изменякнцихся праметрах нагрузки.
Цель изобретения - улучшение качества стабилизации выходного напржения вьшрямителя в переходных режимах.
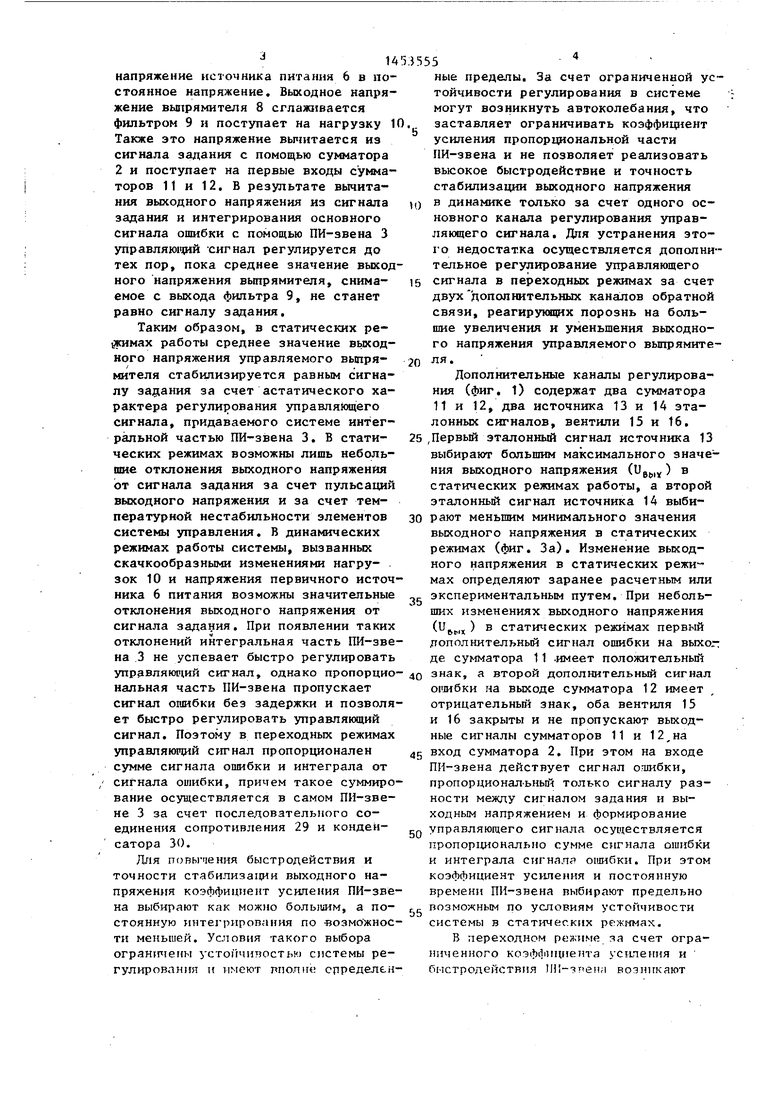
; На фиг. 1 приведена структурная схема устройства, реализующего прелагаемый способ; на фиг. 2 - принцпиальная электрическая схема части элементов устройства, с помощью ко рой формируется управляющий сигнал iU
на фиг. 3 - диаграммы, поясня Ьощие способ.
Устройство (фиг. 1) содержит ис- очник 1 сигнала задания, вькод ко- |торого через первый вход сумматора Подсоединен к входу пропорционально- интегрального (пи) звена 3.
Выход звена 3 подключен к первому входу блока 4 компараторов. Второй бход которого 4 соединен с блоком 5 Генераторов опорного напряжения, вхо tcoTOporo, в свою очередь, подключен К первичному источнику 6 питания. Вы Ход блока компараторов через блок 7 выходных каскадов соединен с управляющим входом выпрямителя 8. Силовой Йход управляемого выпрямителя 8 соединен с выходом первичного источни- i|ca 6 питания. Выход управляемого вы- Йрямителя В через силовой фильтр 9 подключен к нагрузке 10 и к второму зрходу сумматора 2. Выход силового фильтра 9, кроме того, соединен с первыми входами сумматоров 11 и 12, йторые входы которых соединены с выходами источников 13 и 14 первого И второго эталонных сигналов соответственно. Выходы сумматоров 11 и 12 соединены соответственно с третьим и четвертым входами сумматора 2 через вентили 15 и 16, которые пропускают соответственно первый допол- Нительньй сигнал отрицательного зна- к;а и второй дополнительный сигнал Г оложительного знака.
Устройство содержит также клем- fsy 17 для подключения к источнику Г сигнала задания, клемму 18 для подключения к выходу силового фильтра 9 утфавляемого выпрямителя 8, клемму 19 - для подключения к выходу источ
to
5
20
25
35
JQ
40
45
0
5
ника 14 второго эталонного сигнала, клемму 20 для подключения к выходу источника 13 первого эталонного сигнала и клемму 21 - выходная клемма для подключения к входу блока 4 компараторов. Второй сумматор It на принципиальной схеме представлен делителем напряжения на резисторах 22 и 23, третий сумматор 12 - на резисторах 24 и 25, выходное напряжение (и Bt,,x) вычитается из сигнала задания (и) за счет резистбров 26 и 27. Сумматор 2 основного и дополнительного сигналов ошибки и ПИ-звено 3 собраны на операционном усилителе 28, охваченном отрицательной обратной связью с помощью RC-цепочки 29 и 30. Для схемотехнической реализации остальных элементов устройства согласно фиг.-1 могут использоваться стандартные элементы преобразовательной техники. Так, в качестве компараторов блока 4 могут использоваться операционные усилители с большим коэффициентом усиления. Число компараторов равно числу вентилей выпрямителя. Блок 5 генераторов опорного напряжения представляет собой набор генератора напряжения пилообразной формы, синхронизированных с напряжением первичного источника 6 питания, в качестве которого может быть использован автономный синхронный генератор. Управляемый выпрямитель может быть собран по любой известной схеме, например трехфазной мостовой. Силовой фильтр представляет собой, например, одно- звенный Г-образный LC-фильтр.
Способ управления стабилизированным выпрямителем осуществляется следующим образом.
Выходное напряжение (U) источника 1 сигнала задания через первый вход сумматора 2 и ПИ-звено 3 поступает на первый вход блока 4 компараторов. На второй вход блока 4 поступают опорные сигналы из блока 5 генераторов опорных напряжений, которые синхронизированы с напряжением фаз питающей сети первичного источника 6 питания. В блоке 4 компараторов формируются импульсы в моменты равенства опорных сигналов блока 5 и управляющего сигнала с выхода блока 4, которые усиливают по мощности в блоке 7 выходных каскадов и подают на тиристоры управляемого выпрямителя 8, который преобразует переменное
14
напряжение источника питания 6 в постоянное напряжение. Выходное напряжение вьпфямителя 8 сглаживается фильтром 9 и поступает на нагрузку 10 Также это напряжение вьпситается из сигнала задания с помощью сумматора 2 и поступает на первые входы сумматоров 11 и 12. В результате вычитания выходного напряжения из сигнала задания и интегрирования основного сигнала ошибки с помощью ПИ-звена 3 управляю1 р|й Сигнал регулируется до тех пор, пока среднее значение выходного напряжения выпрямителя, снимаемое с выхода фильтра 9, не станет равно сигналу задания.
Таким образом, в статических ре- дкимах работы среднее значение вькод- ного напряжения управляемого выпрямителя стабилизируется равным сигналу задания за счет астатического характера регулирования управляйщего сигнала, придаваемого системе интегральной частью пи-звена 3. В статических режимах возможны лишь небольшие отклонения выходного напряжения от сигнала задания за счет пульсаций выходного напряжения и за счет температурной нестабильности элементов системы управления. В динамических режимах работы системы, вызванных скачкообразными изменениями нагру- . зок 10 и напряжения первичного источника 6 питания возможны значительные отклонения выходного напряжения от сигнала задания. При появлении таких отклонений интегральная часть ПИ-зве- на .3 не успевает быстро регулировать управляющий сигнал, однако пропорциональная часть пи-звена пропускает сигнал ошибки без задержки и позволяет быстро регулировать управляющий сигнал. Поэтому в переходных режимах управляющий пропорционален сумме сигнала ошибки и интеграла от сигнала ошибки, причем такое суммирование осуществляется в самом ПИ-зве- не 3 за счет последовательного соединения сопротивления 29 и конденсатора 30.
Для повьгчения быстродействия и точности стабилизации выходного напряжения коэффициент усиления ПИ-зве- на выбирают как можно большим, а постоянную интегрирования по возможности меньшей. Условия такого выбора orpaHinieriM устоГшитюстьн) системы регулирования и имеют РПОЛ1К; срределе-н5
ные пределы. За счет ограниченной устойчивости регулирования в системе могут возникнуть автоколебания, что
заставляет ограничивать коэффициент усиления пропорциональной части пи-звена и не позволяет реализовать вьюокое быстродействие и точность стабилизации выходного напряжения
в динамике только за счет одного основного канала регулирования управляющего сигнала. Для устранения этого недостатка осуществляется дополнительное регулирование управляющего
сигнала в переходных режимах за счет двух дополнительных каналов обратной связи, реагирукицих порознь на большие увеличения и уменьшения выходного напряжения управляемого выпрямителя.
Дополнительные каналы регулирования (фиг, 1) содержат два сумматора 11 и 12, два источника 13 и 14 эта- лонньк сигналов, вентили 15 и 16.
,Первый эталонный сигнал источника 13 выбирают большим максимального значения выходного напряжения ((„у) в статических режимах работы, а второй эталонный сигнал источника 14 выбирают меньшим минимального значения выходного напряжения в статических режимах (фиг. За), Изменение выходного напряжения в статических режимах определяют заранее расчетным или
экспериментальным путем. При небольших изменениях выходного напряжения (и, ) в статических режимах первый дополнительный сигнал ошибки на выходе сумматора 11 .имеет положительньй
знак, а второй дополнительный сигнал оржбки на выходе сумматора 12 имеет отрицательный знак, оба вентиля 15 и 16 закрыты и не пропускают выходные сигналы сумматоров 11 и 12,на
вход сумматора 2. При этом на входе пи-звена действует сигнал огнибки, пропорционалъньп только сигналу разности между сигналом задания и выходным напряжением и формирование
управляющего сигнала осуществляется пропор1Ц1Онально сумме сигнала ошибки и интеграла сигналя ошибки. При этом коэффициент усиления и постоянную времени ПИ-звена выбирают предельно
позмохным по условиям устойчивости системы в статических режимах.
В переходном режиме за счет ограниченного коэффициента ус ьтеиня и быстродействия ) возникают
значительные отклонения выходного напряжения (Ug,, ) от сигнала задания (Up, и в этих режимах осуществляется дополнительное регулирование упг равлякщего сигнала дополнительными каналами, позволяющее уменьшить отклонения выходного напряжения по сравнению с регулированием сигнала только по основному каналу управления. Так, при сбросе нагрузки (фиг.З, момент времени t,) появляется выброс выходного напряжения, превышающий первый эталонный сигнал (и,,).В результате знак первого дополнительного IB ным сигналом ошибки, что приводит
14535556
сигнала пропорционально сумме основного сигнала ошибки и интеграла от сигнала ошибки с коэффициентом пропор g циональности и постоянной интегрирования, выбранным по условиям устойчивости системы регулирования, то в статических режимах система устойчива, автоколебания не возникают и 10 выходное напряжение стабилизируется с высокой точностью. В переходных режимах ос5|Тчествляется дополнительное суммирование первого либо второго дополнительного сигнала с основсигнала сумматора 11 изменяется на отрицательный, вентиль 15 открывается и дополнительный отрицательный сигнал поступает через третий вход сумматора 2 на вход ПИ-звена. В результате входной сигнал ПИ-звена равен сумме основного сигнала ошибки и первого дополнительного сигнала и имеет отрицательньй знак, а выходной сигнал ПИ-звена быстро уменьшается и увеличивает углы уп- : аБления вентилями преобразователя, что приводит к уменьшению выходно1 о апряжения вьтпрямителя. Начиная с
н
и
ifioMeHTa времени t (фиг„ 3), выходное зо билизации.
к повышению быстродействия регулирования управляющего сигнала. Устойчивая работа системы при этом сохраняется, так как при уменьшении откло20 нения выходного напряжения дополнительное суммирование и регулирование управляющего сигнала прекращается, что не позволяет возникнуть автоколебаниям в системе. Повьш1ение быст25 родействия регулирования управляющего сигнала позволяет уменьшить отклонения выходного напряжения управляемого выпрямителя в переходных режимах и повысить качество его стаЙапряжение U,, становится меньше фервого эталонного сигнала (Uji), iji вентиль 15 снова закрывается, от- шючая дополнительньй канал регулирования управляющего сигнала. Аналогично работает второй дополнительный канал регулирования при уменьшении выходного напряжения (ив.,) ниже JBTOporo эталонного сигнала (Ugj) на интервале времени ъ (фиго 3), Йо с той разницей, что сигнал с выхода сумматора 12 в переходном режиме имеет положительный знак, увели- чиваюрдий дополнительно входной сигнал пи-звена, что сопровождается 5ыстрым увеличением управляющего сигнала на выходе ПН-звена и быстрым увеличением выходного напряжения выпрямителя.
За счет суммирования основного сигнала ошибки и дополнительрюго сигнала на входе ПИ-звана в переходных режимах уменьшается отклонение выходного напряжения по величине и по
35
Таким образом, предлагаемый способ позволяет, повысить качество ста- билизации выходного напряжения в переходных режимах.
Формула изобретения
Способ управления стабилизирован- 40 ным вьтрямителем, заключаю1 1(ийся в том, что формируют сигнал задания выходного напряжения вьлрямителя, измеряют выходное напряжение выпрямителя, формируют основной сигнал 45 ошибки, пропорциональный разности сигнала задания выходного напряжения выпрямителя и сигнала, пропорционального выходному напряжению выпрямителя, формируют управляющий сигнал, 5Q пропорциональный сумме основного сигнала ошибки и интеграла от основного сигнала ошибки, при этом коэффици- ент пропорциональности и постоянную времени интегрирования выбирают по
Способ управления стабилизирован 40 ным вьтрямителем, заключаю1 1(ийся в том, что формируют сигнал задания выходного напряжения вьлрямителя, измеряют выходное напряжение выпрямителя, формируют основной сигнал 45 ошибки, пропорциональный разности сигнала задания выходного напряжени выпрямителя и сигнала, пропорционал ного выходному напряжению выпрямите ля, формируют управляющий сигнал, 5Q пропорциональный сумме основного си нала ошибки и интеграла от основног сигнала ошибки, при этом коэффици- ент пропорциональности и постоянную времени интегрирования выбирают по
времени по сравнению с регулгфовани- g условиям устойчивости стабилизации ем управляющего сигнала только с по-выходного напряжения выпрямителя,
мощью од}юго основного канала. По-формируют опорные сигналы, синхроскольку в стат1гческих режимах осущест- низированные с напряжениями фаз пи- 1Шяется регулирование управляющеготающей сети, в моменты равенства
билизации.
к повышению быстродействия регулирования управляющего сигнала. Устойчивая работа системы при этом сохраняется, так как при уменьшении отклонения выходного напряжения дополнительное суммирование и регулирование управляющего сигнала прекращается, что не позволяет возникнуть автоколебаниям в системе. Повьш1ение быстродействия регулирования управляющего сигнала позволяет уменьшить отклонения выходного напряжения управляемого выпрямителя в переходных режимах и повысить качество его ста
Таким образом, предлагаемый способ позволяет, повысить качество ста- билизации выходного напряжения в переходных режимах.
Формула изобретения
Способ управления стабилизирован- ным вьтрямителем, заключаю1 1(ийся в том, что формируют сигнал задания выходного напряжения вьлрямителя, измеряют выходное напряжение выпрямителя, формируют основной сигнал ошибки, пропорциональный разности сигнала задания выходного напряжения выпрямителя и сигнала, пропорционального выходному напряжению выпрямителя, формируют управляющий сигнал, пропорциональный сумме основного сигнала ошибки и интеграла от основного сигнала ошибки, при этом коэффици- ент пропорциональности и постоянную времени интегрирования выбирают по
которых управляющему сигналу, формируют иьшульсы управления тиристорами вьшрямителя, о т л и ч, а ю щ и й- с я тем, что, с целью повьшения качества стабилиза1ии выходного напряжения выпрямителя в переходных режимах, определяют максимальное и минимальное значения выходного напряжения выпрямителя в статических режимах, формируют первый эталонный сигнал, значение которого превышает указанное максимальное значение выходного напряжения, и второй эталонпропорциональный разности первого эталонного сигнала и сигнала, пропорционального выходному напряжению выпрямителя, и второй дополнительный сигнал ошибки, пропорциональный разности второго эталонного сигнала и сигнала, пропорционального выходному напряжению выпрямителя, и в случае, если первый дополнительный сигнал ошибки имеет отрицательное значение, осуществляют суммирование основного и первого дополнительного сигналов ошибки, а в случае, если второй доный сигнал, значение которого не пре- 15полнительный сигнал ошибки имеет повьшиет указанное минимальное значе-ложительное значение, осуществляют
ние выходного напряжения, формируютсуммирование основного и второго допервьй дополнительный сигнал ошибки,полнительного сигналов ошибки.
19 20
пропорциональный разности первого эталонного сигнала и сигнала, пропорционального выходному напряжению выпрямителя, и второй дополнительный сигнал ошибки, пропорциональный разности второго эталонного сигнала и сигнала, пропорционального выходному напряжению выпрямителя, и в случае, если первый дополнительный сигнал ошибки имеет отрицательное значение, осуществляют суммирование основного и первого дополнительного сигналов ошибки, а в случае, если второй дополнительный сигнал ошибки имеет по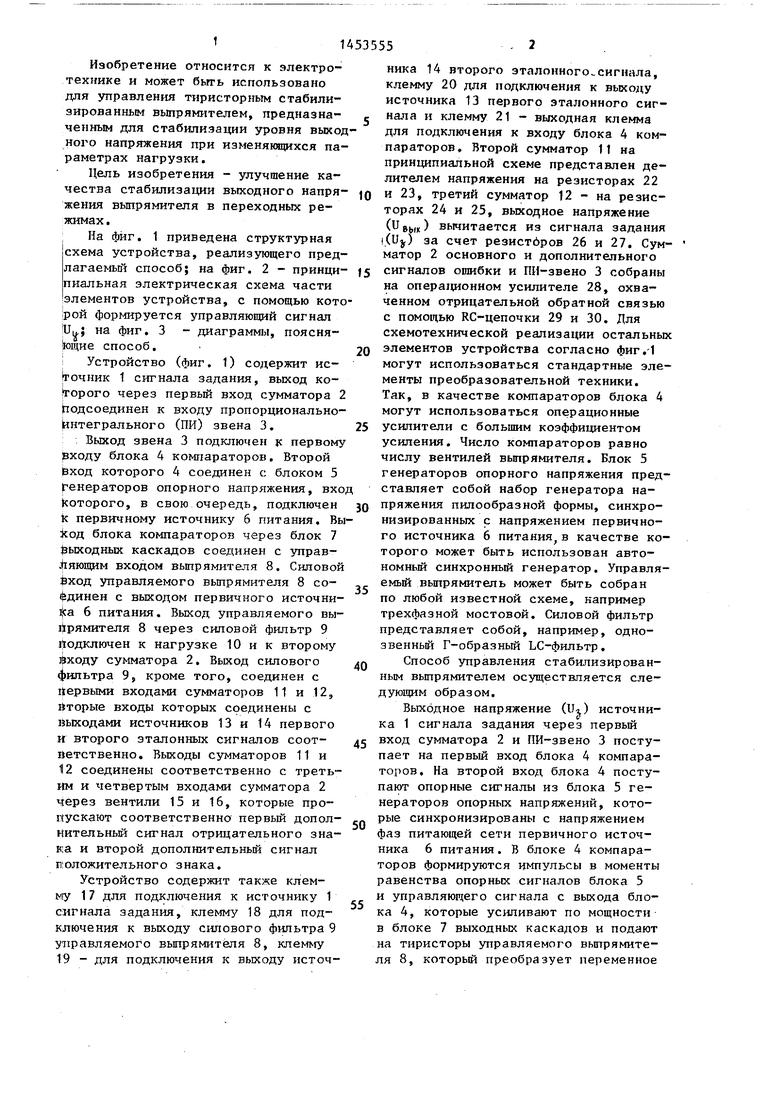

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления стабилизированным выпрямителем | 1987 |
|
SU1473043A2 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2444833C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2381609C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2003 |
|
RU2246747C1 |
| Способ управления последовательным резонансным инвертором напряжения с диодами встречного тока | 1989 |
|
SU1791941A1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2380820C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЕМ ПРИ НЕСИММЕТРИЧНОЙ НАГРУЗКЕ | 2010 |
|
RU2442275C1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2011 |
|
RU2472268C1 |

Изобретение относится к электротехнике и может бьп-ь использовано . для управления тиристорньй стабилизи- рованньм выпрямителем, предназначенным для стабилизации уровня выходного напряжения при изменяющихся параметрах нагрузки. Целью изобретения является улучшение качества стабилизации выходного напряжения вьррямите- ля в переходных процессах. С помощью источника эталонных напряжений 1 формируют сигнал задания, из которого на сумматоре 2 вычитают выходное напряжение вьптрямителя 8, сглаженное силовым фильтром 9. Сигнал ошибки усиливают и интегрируют с помощью пропорхщонально-интегрального звена 3 и регулируют фазу импульсов управления. Для повышения качества стабилизации выходного напряжения в переходных режимах определяют максимальное и минимальное значения выходного напряжения на нагрузке 10 выпрямителя 8 в статических режимах, формируют с помощью источников 13, 14 два эталонных сигнала, один из которых больше максимального, а другой меньше минимального измеренных значений выходного напряжения в статических ре- жимахо Выходное напряжение вычитают из первого и второго эталонных сигналов в сумматорах 11, 12 и при больших отклонениях выходного напряжения от номинального значения в динамике выполняют суммирование основного сигнала ошибки сумматора 2 с первым дополнительным сигналом ошибки сумматора 11 при его отрицательном знаке, и суммируют основной сигнал ошибки со вторым дополнительным сигналом ошибки сумматора 12 при его положительном знаке. 3 ил. ш (Л 4: сд 00 ел ел ел (ptie i
IS
/7
0гл
-сг:
Фиг. г
lux
| Писарев А.Л | |||
| и Деткин Л.П | |||
| Управление тиристорными преобразовате- лямис - М.: Энергия, 1975, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Автоматизированный вентильный электропривод | |||
| - М.: Энергия, 1969, с | |||
| Телефонный аппарат, отзывающийся только на входящие токи | 1921 |
|
SU324A1 |
