| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СИСТЕМ | 1990 |
|
RU2050019C1 |
| Устройство для моделирования мышечного сокращения | 1987 |
|
SU1503832A1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ЗДОРОВЬЯ ЧЕЛОВЕКА ПО ГРУППОВЫМ ЭНЕРГЕТИЧЕСКИМ ХАРАКТЕРИСТИКАМ ПРОЕКЦИОННЫХ ЗОН | 2000 |
|
RU2195861C2 |
| Устройство для моделирования контрастности | 1988 |
|
SU1642484A1 |
| Модуль популяции нейронов | 1989 |
|
SU1732356A1 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА РЕПАРАТИВНО-РЕГЕНЕРАТИВНЫЕ ПРОЦЕССЫ ПРИ ПОВРЕЖДЕНИИ ПЕРИФЕРИЧЕСКОГО НЕРВА | 2016 |
|
RU2636904C1 |
| СПОСОБ ДИАГНОСТИКИ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ БИОМЕМБРАН ПРИ МАГНИТНЫХ АППЛИКАЦИЯХ ПО "ЭФФЕКТУ МОЛЧАНИЯ" В ДУГЕ СОМАТИЧЕСКОГО РЕФЛЕКСА | 1996 |
|
RU2144311C1 |
| Устройство для исследования нервно-мышечной системы | 1990 |
|
SU1827171A1 |
| ВОССТАНОВЛЕНИЕ СЕНСОМОТОРНОЙ ФУНКЦИИ С ПОМОЩЬЮ СИСТЕМЫ НЕЙРОПРОТЕЗИРОВАНИЯ И СПОСОБ ЕЕ РЕАЛИЗАЦИИ | 2020 |
|
RU2772637C2 |
| СПОСОБ ДИСКРЕТНОЙ ОЦЕНКИ СОСТОЯНИЯ ИННЕРВАЦИИ МЫШЦ ЗАПИРАТЕЛЬНОГО АППАРАТА ПРЯМОЙ КИШКИ ПРИ СИНДРОМЕ ОПУЩЕНИЯ ПРОМЕЖНОСТИ | 2010 |
|
RU2454930C1 |
Изобретение относится к медицине и может быть использовано для исследования механизмов торможения спинного мозга. Цель изобретения - повышение достоверности моделирования свойств мышцы путем учета управляющего воздействия нервных центров спинного мозга. Поставленная цель достигается путем введения в состав известного устройства блока 1 моделирования популяции вставочных нейронов, блока 2 моторных нейронов и блока 3 моделирования пресинаптического механизма управления. Таким образом, изменения частоты следования импульсов на входе модели многонейронной рефлекторной дуги, приводят к изменению величины торможения и соответствующему изменению амплитудных отклонений двигательного аппарата скелетной мышцы, 1 ил.
4Ь
1
Јь
ОЭ 00 СО
1
Изобретение относится к медицине и может быть использовано для исследования механизмов торможения спинного мозга.
Цель изобретения - повышение достоверности моделирования свойств мышцы путем учета управляющего воздействия нервных центров спинного мозга.
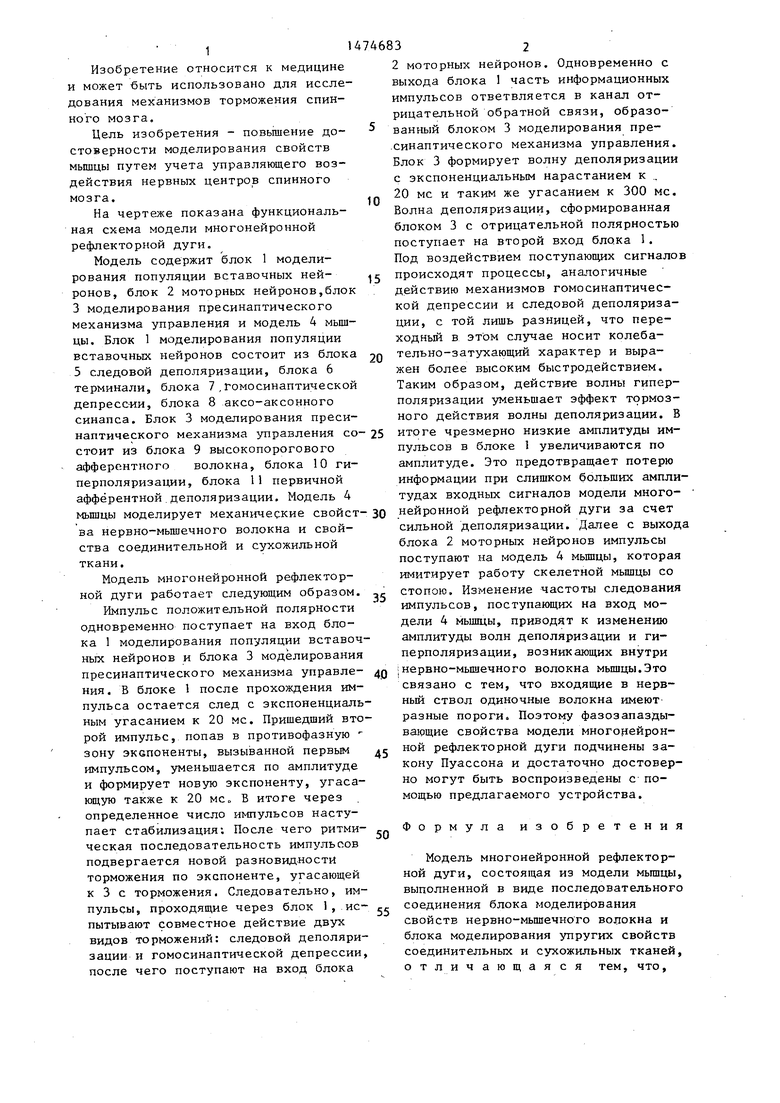
На чертеже показана функциональная схема модели многонейронной рефлекторной дуги.
Модель содержит блок 1 моделирования популяции вставочных нейронов, блок 2 моторных нейронов,блок 3 моделирования пресинаптического механизма управления и модель 4 мышцы. Блок 1 моделирования популяции вставочных нейронов состоит из блока 5 следовой деполяризации, блока 6 терминали, блока 7.гомосинаптической депрессии, блока 8 аксо-аксонного синапса. Блок 3 моделирования пресинаптического механизма управления со- стоит из блока 9 высокопорогового афферентного волокна, блока 10 гиперполяризации, блока 11 первичной афферентной деполяризации. Модель 4 мышцы моделирует механические свойст- ва нервно-мышечного волокна и свойства соединительной и сухожильной ткани.
Модель многонейронной рефлекторной дуги работает следующим образом Импульс положительной полярности одновременно поступает на вход блока 1 моделирования популяции Вставочных нейронов и блока 3 моделирования пресинаптического механизма управле- ния. В блоке 1 после прохождения импульса остается след с экспоненциальным угасанием к 20 мс. Пришедший второй импульс, попав в противофазную зону экспоненты, вызыванной первым импульсом, уменьшается по амплитуде и формирует новую экспоненту, угасающую также к 20 мс„ В итоге через определенное число импульсов наступает стабилизация: После чего ритмическая последовательность импульсов подвергается новой разновидности торможения по экспоненте, угасающей к 3 с торможения. Следовательно, импульсы, проходящие через блок 1, ис- пытывают совместное действие двух видов торможений: следовой деполяризации и гомосинаптической депрессии, после чего поступают на вход блока
10
15
20
2530
до „
746832
2 моторных нейронов. Одновременно с выхода блока 1 часть информационных импульсов ответвляется в канал отрицательной обратной связи, образованный блоком 3 моделирования пресинаптического механизма управления. Блок 3 формирует волну деполяризации с экспоненциальным нарастанием к . 20 мс и таким же угасанием к 300 мс, Волна деполяризации, сформированная блоком 3 с отрицательной полярностью поступает на второй вход блока 1. Под воздействием поступающих сигналов происходят процессы, аналогичные действию механизмов гомосинаптической депрессии и следовой деполяризации, с той лишь разницей, что переходный в этом случае носит колебательно-затухающий характер и выражен более высоким быстродействием. Таким образом, действие волны гиперполяризации уменьшает эффект тормозного действия волны деполяризации. В итоге чрезмерно низкие амплитуды импульсов в блоке 1 увеличиваются по амплитуде. Это предотвращает потерю информации при слишком больших амплитудах входных сигналов модели многонейронной рефлекторной дуги за счет сильной деполяризации. Далее с выхода блока 2 моторных нейронов импульсы поступают на модель 4 мышцы, которая имитирует работу скелетной мышцы со стопою, Изменение частоты следования импульсов, поступающих на вход модели 4 мышцы, приводят к изменению амплитуды волн деполяризации и типе рполяризации, возникающих внутри tнервно-мышечного волокна мышцы.Это связано с тем, что входящие в нервный ствол одиночные волокна имеют разные пороги. Поэтому фазозапазды- вающие свойства модели многонейронной рефлекторной дуги подчинены закону Пуассона и достаточно достоверно могут быть воспроизведены с помощью предлагаемого устройства.
35
45
Формула изобретения
Модель многонейронной рефлекторной дуги, состоящая из модели мышцы, выполненной в виде последовательного соединения блока моделирования свойств нервно-мышечного волокна и блока моделирования упругих свойств соединительных и сухожильных тканей, отличающаяся тем, что,
3 14746834
с целью повышения достоверности мо-к являются входом устройства, выход
делирования свойств мышцы путем уче-блока моделирования популяции встата управляющего воздействия нервныхвочных нейронов соединен с входом
центров спинного мозга, в нее вве-5 блока моторных нейронов и с вторым
дены блок моделирования копуляциивходом блока моделирования пресивставочных нейронов, блок моделиро-наптического механизма управления,
вания пресинаптического механизмавыход которого соединен с вторым
управления, блок моторных нейронов,входом блока моделирования.попупричем вход блока моделирования по-ю ляции вставочных нейронов, выход
пуляции вставочных нейронов и входблока моторных нейронов соединен с
блока моделирования пресинаптическо-входом модели мышцы, выход которого
го механизма управления объединеныявляется выходом устройства.
| Модель мышцы | 1983 |
|
SU1164746A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
