Уровень техники
[0001] Настоящее изобретение относится к системам активации сенсомоторной функции. Настоящее изобретение является системой для восстановления нарушенной локомоции после травмы спинного мозга и базируется на оценке в реальном времени функциональных моторных вызванных потенциалов (фМВП) и так же восстановленной топологии нейронного контура, а также включает метод воссоздания топологии нейронного контура.
[0002] Травма спинного мозга (ТСМ), травма головного мозга, инсульт и другие неврологические заболевания прерывают связь между спинным мозгом и оставшейся частью тела, тем самым, влияя на произвольный контроль над функциями ниже уровня травмы. В исследованиях на других животных и людях было показано, что эпидуральная и/или интраспинальная электрическая стимуляция позволяет активировать спинномозговые локомоторные сети после ТСМ. Например, эпидуральная электрическая стимуляция (ЭЭС) восстанавливает скоординированную двигательную активность у животных после ТСМ и отдельные движения ног у лиц с двигательным параличом.
[0003] Ранее было продемонстрировано, что структура спинного мозга включает в себя несколько микроконтуров. Эти микроконтуры обрабатывают сенсорную информацию, возникающую в ходе движения конечностей, и выходы из различных областей головного мозга для порождения локомоторных ответов и координации сложных двигательных паттернов. Схема формирования паттерна, отвечающего за ритмические двигательные выходы, такие как локомоция, предположительно включает множество ядер с взаимным ингибированием, генерирующим циклическую тормозную и/или возбуждающую активность. Ранее было показано, что использование симуляции учтойчивах паттернов центральной нервной системы (мотивов) микроконтуров способствует развитию технических решений для нейромодуляции на различных уровнях центральной нервной системы (ЦНС). В частности, реализация мотивов микроконтуров, ответственных за локомоцию, в системе нейропротезирования для компенсации утраченной моторной функции, может привести к восстановлению двигательных функций у пациентов с ТСМ.
Сущность изобретения
[0004] Настоящее изобретение представляет нейроморфную систему протезирования, для восстановления сенсомоторной функции у лиц, нуждающихся в этом. Система включает множество стимуляторов, имеющих 1 или более каналов, для расположения в различных местах на теле пациента для обеспечения скоординированной электрической стимуляции групп мышц, периферических нервов, нервных сплетений и стимуляции спинного мозга. Кроме этого система имеет множество датчиков, установленных для обнаружения и передачи непрерывного или циклического распределения веса тела, угловых движений суставов, кинетики и электрофизиологических параметров. В дополнение, система включает контроллеры, настроенные для получения данных с множества датчиков и сконфигурированные для обработки собранных данных и передачи их на устройство, реализующее искусственный нейронный контур на основании фМВП. Устройство, реализующее искусственный нейронный контур на основании фМВП, сконфигурировано для реализации воссоздания топологии центрального генератора упорядоченной активности (ЦГУА). Устройство, реализующее искусственный нейронный контур на основании фМВП, использует биореалистичную топологию для генерации паттерна двигательной функции и координирует применение электрических сигналов через множество биосовместимых стимуляторов, к субъекту, нуждающемуся в этом, для реализации паттерна моторной функции.
[0005] Настоящее изобретение описывает способ активации моторной функции в конечностях, на нескольких уровнях, таких как мышцы, периферические нервы, нервные сплетения и центрального контура на уровне спинного мозга субъекта, нуждающегося в этом. Способ включает множество стимуляторов, имеющих 1 или более каналов, для размещения в различных местах на теле субъекта для обеспечения скоординированной электрической стимуляции групп мышц, периферических нервов, нервных сплетений и стимуляции спинного мозга электростимуляцией для множественной целевой иннервации. Способ дополнительно включает множество датчиков, настроенных для обнаружения и передачи непрерывного или циклического распределения веса тела, угловых движений суставов, кинетики и электрофизиологических параметров. В дополнение, способ включает контроллеры, настроенные для получения данных с множества датчиков, обработки собранных данных и передачи собранных данных устройству, реализующему искусственный нейронный контур на основании фМВП; устройство, реализующее искусственный нейронный контур на основании фМВП, сконфигурировано для реализации воссоздания топологии центрального генератора упорядоченной активности (ЦГУА). Далее, способ включает стимуляцию субъекта, нуждающегося в этом, для выполнения двигательной функции через электрические сигналы, передаваемые множеством стимуляторов субъекту. Устройство, реализующее искусственный нейронный контур на основании фМВП, применяет биореалистичную нейронную топологию для паттерна моторной функции и координирования применения электрических сигналов.
[0006] Настоящее изобретение обеспечивает способ воссоздания нейронной топологии, отвечающей за активацию моторной функции в конечностях и основанной на оценке функциональных моторных вызванных потенциалов. Способ включает обнаружение паттерна нейронного ответа в соответствии с входными стимуляционными параметрами, анализ паттерна нейронного ответа для выделения стабильного паттерна, стабильный паттерн нейронного ответа определяется на основе множества пиков, каждый пик имеет максимальное и минимальное значения, амплитуду и время. Способ дополнительно включает оценку топологии нейронной цепи с помощью сравнения паттена нейронного ответа с известным биологическим нейронным ответом, который формирует выходной сигнал для активации моторной функции в конечностях.
[0007] В настоящем изобретении, осцилляторный мотив (ОМ) используется для генерации паттерна нейронного ответа, где ОМ включает компонент взаимного возбуждения и компонент ингибирующей обратной связи.
[0008] В настоящем изобретении, модель многоуровневой спинномозговой локомоторной сети (мСЛС) используется для генерации паттерна нейронного ответа, мСЛС включает моносинаптический и полисинаптический слои.
Краткое описание чертежей
[0009] Для понимания изобретения в подробном описании, кратко изложенном выше, будут раскрыты частные варианты реализации, изображенные на прилагаемых чертежах. Данные чертежи изображают только типовые варианты реализации изобретения, поэтому их не следует считать ограничивающими сферу его применения, частные варианты реализации изобретения будут описаны и объяснены с дополнительной конкретикой и детализацией с помощью использования прилагаемых чертежей.
[0010] Фиг. 1(A) - 1(C) изображают осцилляторный мотив (ОМ) в соответствии с вариантом реализации изобретения;
[0011] Фиг. 2 изображает модель многоуровневой спинномозговой локомоторной сети (мСЛС) в соответствии с вариантом реализации изобретения;
[0012] Фиг. 3 изображает миограммы паттернов функциональных моторных вызванных потенциалов (фМВП) в ответ на импульсы эпидуральной электрической стимуляции для мышцы-разгибателя (камбаловидной мышцы) и мышцы-сгибателя (передней большеберцовой мышцы) в соответствии с вариантом реализации изобретения;
[0013] Фиг. 4 изображает обнаруженный паттерн нейронного ответа на основе концепции пиков в соответствии с вариантом реализации изобретения;
[0014] Фиг. 5 изображает паттерн полисинаптических фМВП, имеющих пирамидальную природу плотности пиков, в соответствии с вариантом реализации изобретения;
[0015] Фиг. 6 иллюстрирует задержку, определяемую как время (расстояние) между моно- и полисинаптическими фМВП в соответствии с вариантом реализации изобретения;
[0016] Фиг. 7 изображает нейроморфную систему протезирования в соответствии с вариантом реализации изобретения;
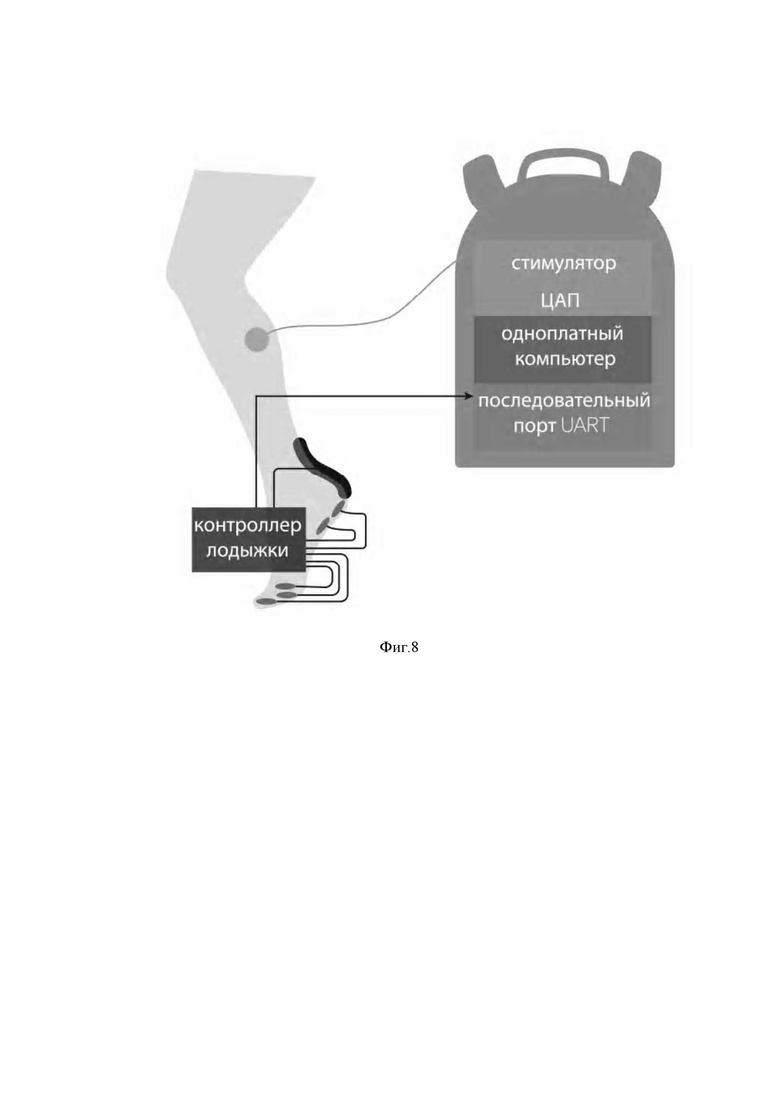
[0017] Фиг. 8 изображает цифровую нейроморфную систему протезирования в соответствии с вариантом реализации изобретения;
[0018] Фиг. 9 изображает спайковую (аналоговую) нейроморфную систему протезирования в соответствии с вариантом реализации изобретения;
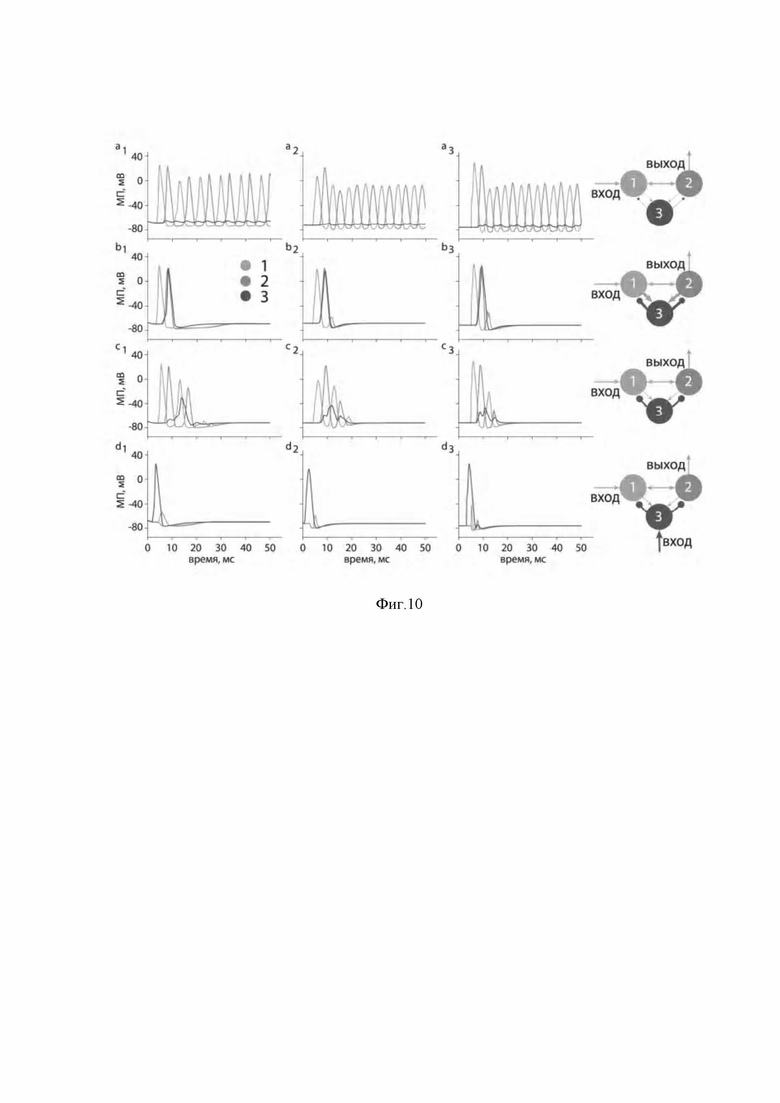
[0019] Фиг. 10 иллюстрирует разнообразие спайковой активности в соответствии с вариантом реализации изобретения;
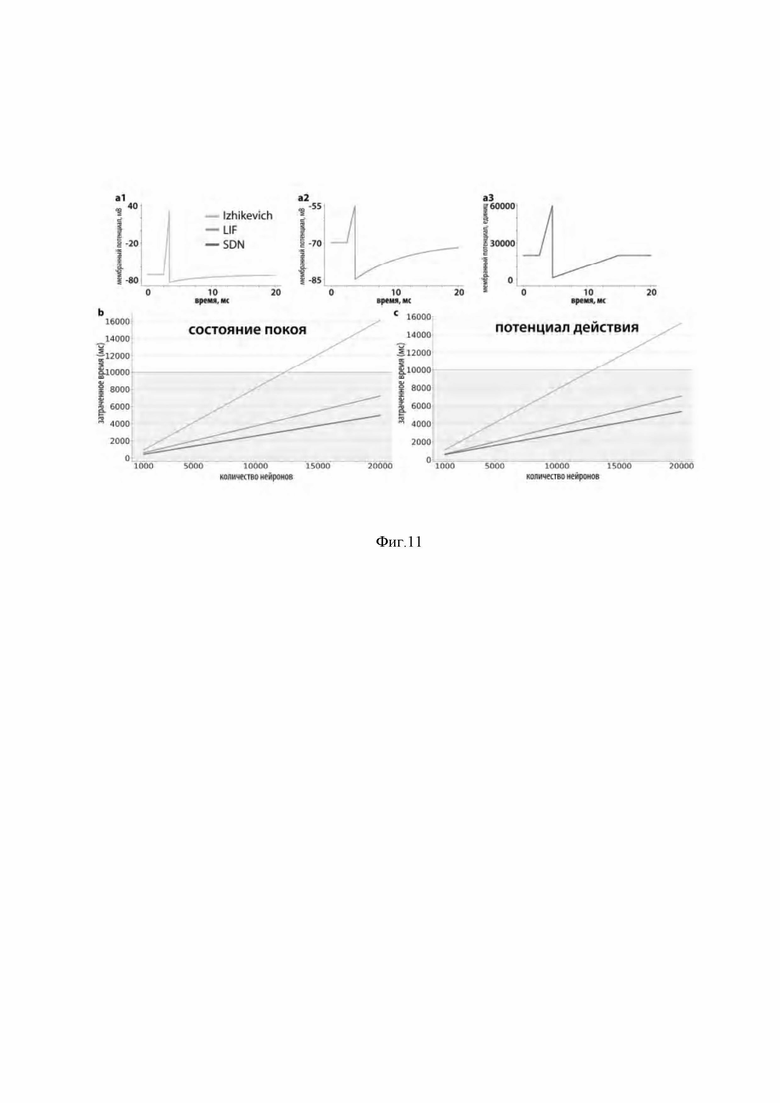
[0020] Фиг. 11 иллюстрирует форму спайка в (a1) модели Ижикевича, (a2) «интегрировать-и-сработать» с утечками (a3) упрощенный цифровой нерон, и
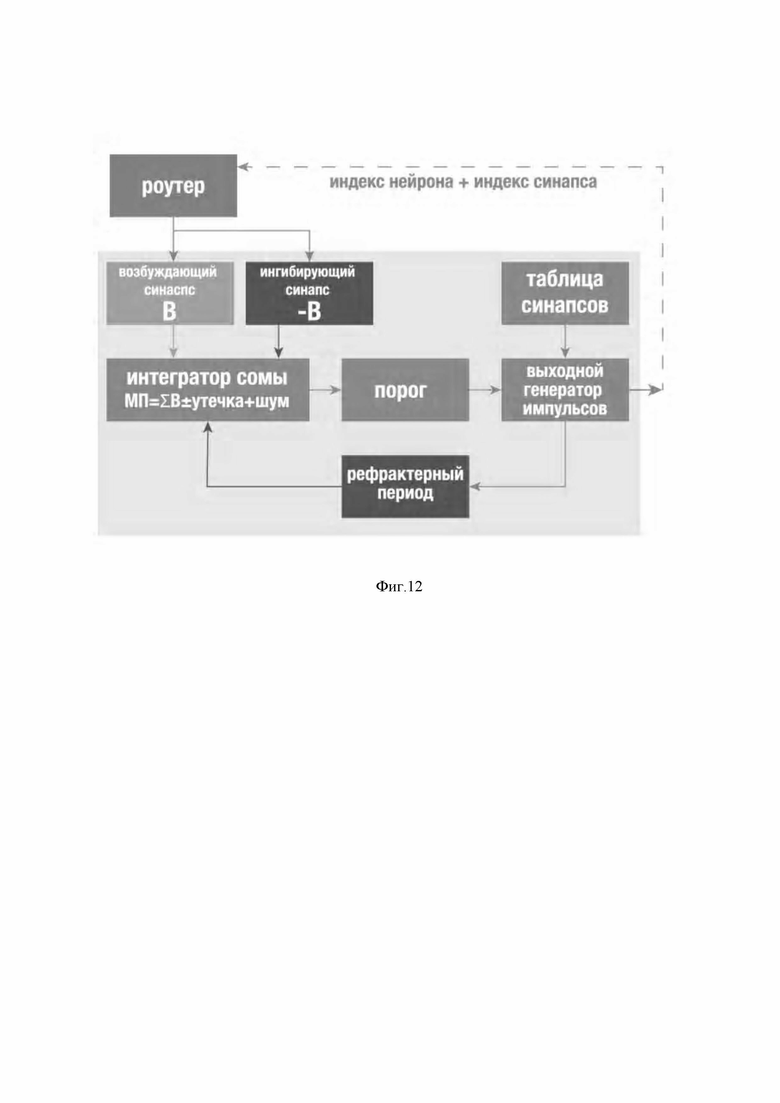
[0021] Фиг. 12 изображает упрощённую цифровую модель нейрона в соответствии с вариантом реализации изобретения.
Подпробное описание
[0022] Ссылка на “конкретный вариант реализации” или аналогичное выражение в описании означает, что специфические свойства, структуры или характеристики, указанные в конкретных вариантах реализации, включены как минимум в один вариант реализации настоящего изобретения. Следовательно, словосочетание “конкретный вариант реализации” или аналогичное выражение в описании не обязательно ссылается на один и тот же конкретный вариант реализации.
[0023] В дальнейшем, различные варианты реализации настоящего изобретения будут описаны более детально со ссылками на прилагаемые чертежи. Тем не менее, следует понимать, что настоящее изобретение может быть модифицировано специалистами в данной области в соответствие с нижеследующим описанием для достижения превосходных результатов настоящего изобретения. Поэтому нижеследующее описание должно рассматриваться как всеобъемлющее и пояснительное описание, связанное с настоящим изобретением, для специалистов в данной области, не предназначенное для ограничения формулы настоящего изобретения.
[0024] Ссылка на “вариант реализации”, “определённый вариант реализации” или аналогичное выражение в описании означает, что связанные свойства, структуры или характеристики, описанные в варианте реализации, включены как минимум в один вариант реализации настоящего изобретения. Следовательно, словосочетания “в варианте реализации”, “в определённом варианте реализации” или аналогичные выражения в данном описании не обязательно ссылаются на один и тот же конкретный вариант реализации.
[0025] Система для восстановления локомоции, повреждённой вследствие травмы спинного мозга (ТСМ) основана на воссоздании топологии нейронного контура, обеспечивающего её. Структура спинного мозга включает различные нейронные микроконтуры. Эти нейронные микроконтуры обрабатывают сенсорную информацию, например, возникающую вследствие движения конечностей, и входы из различных областей головного мозга для генерации локомоторных ответов. Формирование паттерна двигательной активности производится набором ядер, обычно с взаимными ингибирующими и циклическими ингибирующими и /или возбуждающими проекциями и активностью. Воссоздание и/или симуляция мотивов нейронных микроконтуров может способствовать развитию нейромодуляционных решений для восстановления локомоторного контроля у пациентов с ТСМ.
[0026] Топология нейронных контуров, отвечающих за генерацию сложных ритмических паттернов, центральный генератор упорядоченной активности (ЦГУА), в значительной степени не определена. Однако было показано, что эпидуральная электрическая стимуляция (ЭЭС) может способствовать сложным движениям у животных с ТСМ и пациентов путём применения сенсорного (например, электрического) воздействия к контурам ЦГУА. Варианты реализации настоящего изобретения предусматривают, что, поскольку топология контуров ЦГУА в основном остаётся неизвестной, основанное на фМВП воссоздание (т.е. реверсивно-инжиниринговый подход) нейронной схемы ЦГУА спинного мозга, который отвечает за формирование двигательного паттерна, позволяет спроектировать вычислительную модель (in silico), которая может быть реализована на одноплатном компьютере (in cyberico). Полученная в результате вычислительная модель топологии нейронов in silico выполнена в устройстве реализации ЦГУА, которое позволяет генерировать электрические сигналы, совместимые с биологической нейростимуляцией мышц пациента с ТСМ для активации двигательной функции конечностей у таких пациентов.
[0027] С целью воссоздания нейронной топологии, отвечающей за двигательный паттерн у пациента с ТСМ, в соответствии с вариантом реализации настоящего изобретения паттерн нейронного ответа определён на основе известных входов (т.е. сенсорной модуляции и параметров стимуляции) и электрофизиологических выходов в корреляции со специфическим паттерном. Затем паттерн нейронного ответа анализируется в зависимости от времени и амплитуды модуляции ответов. На основе анализа паттерна нейронного ответа воссоздаётся топология нейронного микроконтура. Топология нейронного микроконтура затем реализуется в схеме формирования паттерна, который может генерировать электрический сигнал, совместимый с биологической нейронной стимуляцией для активации моторной функции конечности.
Обнаружение паттернов нейронных ответов в корреляции с входной стимуляцие
[0028] В соответствии с вариантом реализации настоящего изобретения паттерн нейронного ответа определяется на основе известных или частично известных параметров стимуляции, таких как амплитуда, частота и скважность изолированного нейронного контура. Нижеследующие модели in vivo могут быть использованы для того чтобы вызвать двигательные ответы: AIR (т.е. биологическая модель, при которой субъект выполняет шаги в воздухе, не касаясь беговой дорожки, с полной поддержкой с помощью системы поддержки веса тела (ПВС), TOE (модель, при которой субъект едва касается беговой дорожки и выполняет шаги), (plantar - биологическая модель, при которой субъект выполняет бипедальный шаг с поддержкой системой ПВС только для обеспечения вертикального положения). В дополнение, биологическая модель с различными скоростями беговой дорожки, модели, которые включают фармакологическое воздействие квипазином (QPZ) и стрихнином (STR), и модели с различной известной эпидуральной стимуляцией могут быть использованы для определения паттернов нейронных ответов. Различные входы и выходы, проанализированы в экспериментальных моделях in vivo, были детально описаны в статье [Islam et al., 2019]. Мы реализовали подход для оценки топологии нейронного контура и функциональной организации, основанной на различных моторных ответах при различных сенсорных входах. Для того, чтобы записать вызванные моторные ответы, может быть использован некоторый известный метод, например, электромиография с помощью размещения проводников на следующих мышцах: большая ягодичная мышца, прямая мышца бедра, четырёхглавая мышца бедра, большеберцовая мышца, камбаловидная мышца и икроножная мышца.
[0029] В дальнейшем, вычислительные модели in silico могут быть использованы для обнаружения и симуляции паттернов нейронных ответов для известных входных параметров, например, с помощью симуляторов NEURON, NEST и/или GRAS. В соответствии с одним вариантов реализации модель нейрона Ходжкина-Хаксли может быть использована с помощью симулятора NEURON. См. Hodgkin, A.L., Huxley, A.F.: A quantitative description of membrane current and its application to conduction and excitation in nerve. The Journal of Physiology 117(4), 500, 544 (1952). Также может быть использован симулятор NEST. NEST - это симулятор для моделирования импульсных нейронных контуров, который сосредоточен на динамике, размере и структуре нейронных систем, а не на точном строении отдельного нейрона. См. Jordan, J., Ippen, T., Helias, M., Kitayama, I., Sato, M., Igarashi, J., Diesmann, M., Kunkel, S.: Extremely scalable spiking neuronal network simulation code: From laptops to exascale computers. Frontiers in Neuroinformatics 12, 2 (2018).
[0030] Стимулятор GRAS применяет GPU-обработку био-реалистичного нейронного контура, используя язык программирования C++ и технологию Nvidia CUDA. Более конкретно, симулятор GRAS - это стимулятор нейрональной активности в реальном времени с заданной нейронной топологией. Он может поддерживать 3 различных модели нейрона: (1) Упрощенная модель нейрона работающая в режиме реального времени (см. Leukhin, A., Talanov, M., Suleimanova, A., Toschev, A. & Lavrov, I.: Even simpler real-time model of neuron. Bio-NanoScience 1–4 (2020); (2) модель нейрона Ходжкина-Хаксли (см. Hodgkin, A. L. & Huxley, A. F.: A quantitative description of membrane current and its application to conduction and excitation in nerve. The J. Physiol. 117, 500–544); (3) модель нейрона Ижикевича (см. Izhikevich, E. M. Polychronization: Computation with spikes. Neural Comput. (2006)). Моделирование в GRAS сконцентрировано на полной модели нейронной топологии, в отличие от отдельных нейронов в симуляторе NEST. GRAS также использует GPU-обработку для его вычислений, для повышения уровня эффективности.
[0031] В соответствии с вариантами реализации настоящего изобретения для обнаружения и симуляции паттернов нейронных ответов, может быть использована упрощённая симуляционная модель нейрона (простая модель нейрона работающая в режиме реального времени), которую можно использовать для обработки в реальном времени во встроенном биосовместимом устройстве. Одной из основных проблем биореалистичной нейросимуляции является время вычисления носных нейропротезов, требующих обработки в режиме реального времени топологий из тысяч нейронов и сотен тысяч синапсов на одноплатном компьютере с ограниченным весом. Упрощённая цифровая модель нейрона соответствует следующим требованиям: обработка в реальном времени на одноплатном компьютере, принимая в расчёт только биореалистичные времёна спайков, рефракторных периодов, ингибирующих влияний и основанной на пороговых значениях обработки входных спайков. В соответствии с вариантом реализации настоящего изобретения упрощённая симуляционная модель включает следующие предложения оптимизации кода модели нейрона для обработки в реальном времени большого количества нейронов (тысяча и более) и большого количества (сотни тысяч и более) синапсов: моделируются только двигательные нейроны и интернейроны, а амплитуда спайков не учитывается, но вместо неё используется биореалистичные длительности спайка и рефракторного периода. Для того, чтобы выполнить вычисления в реальном времени, используется следующая упрощённая формула уровня мембранного потенциала:
L= ∑W ± ток утечки+шум,
где уровень вычисляется как сумма весов проекций (влияния синаптических токов), тока утечки и шума.
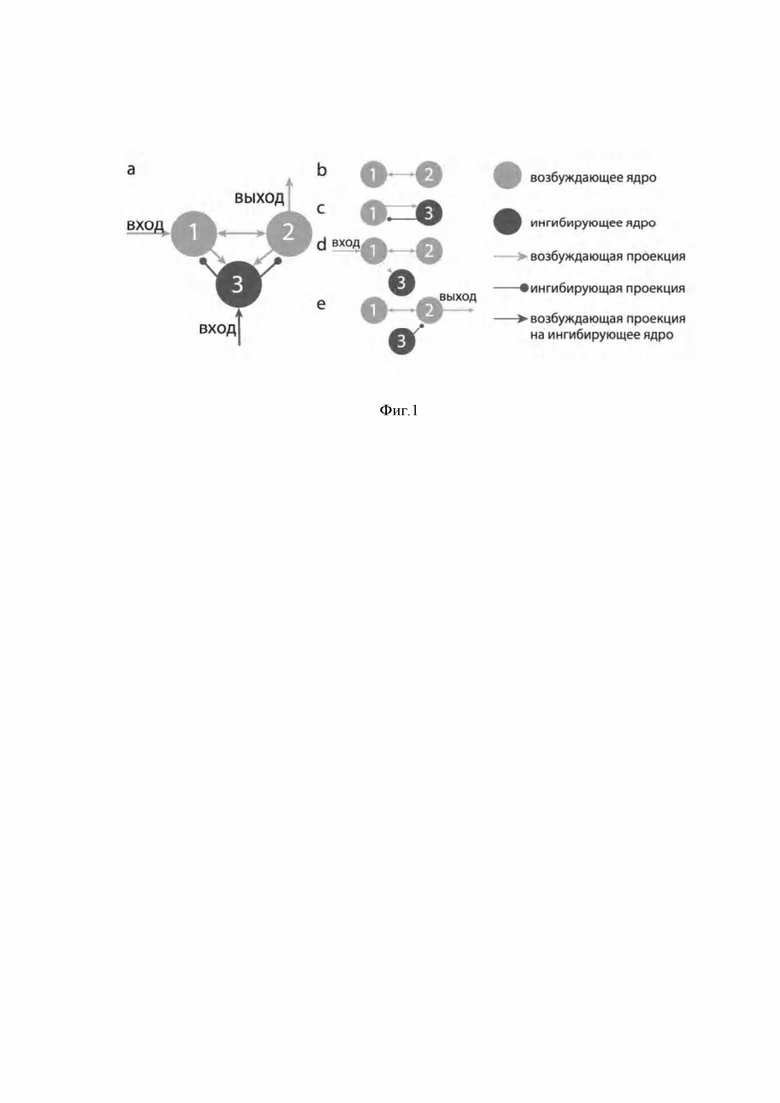
[0032] В соответствии с вариантами реализации настоящего изобретения при определении и анализе паттерне нейронного ответа, осцилляторный мотив (ОМ), как показано на фиг.1(A)-1(C), используется в качестве основы (строительных блоков) нейронных цепей и структуры их микроконтуров, найденных, например, в спинном мозге. ОМ включает 4 часто встречающихся мотивов в центральной нервной системе (ЦНС): (i) ингибирующая обратная связь; (ii) ритмичное возбуждение; (iii) расхождение; и (iv) сходимость. Более точно, ОМ состоит из двух функциональных компонентов: (i) взаимного возбуждения (1, 2) (показано на фиг. 1(B)) и (ii) ингибирующей обратной связи (1, 3) (показано на фиг. 1(C)). ОМ может генерировать нейрональную активность разной продолжительности. Длительность нейрональной активности зависит от баланса весов между возбуждающими и ингибирующими ядрами, как показано на фиг. 1(A)-1(C). Входное ядро 1 получает сигналы, например, от афферентов и/или ЭЭС, и запускает взаимное возбуждение со вторым ядром 2. Первое и второе возбуждающие ядра 1, 2 имеют сильные взаимные проекции для выработки выходной активности, завершающейся ингибирующей проекцией из третьего ядра 3, которое имеет слабые проекции к возбуждающим ядрам 1, 2. В дополнение, выходная активность может быть завершена внешним возбуждающим стимулом третьего ядра (как показано на фиг.1A). Другими словами, в соответствии с вариантами реализации настоящего изобретения, ОМ генерирует нейрональную активность с предопределёнными длительностью и амплитудой посредством баланса между ингибирующими и возбуждающими проекциями.
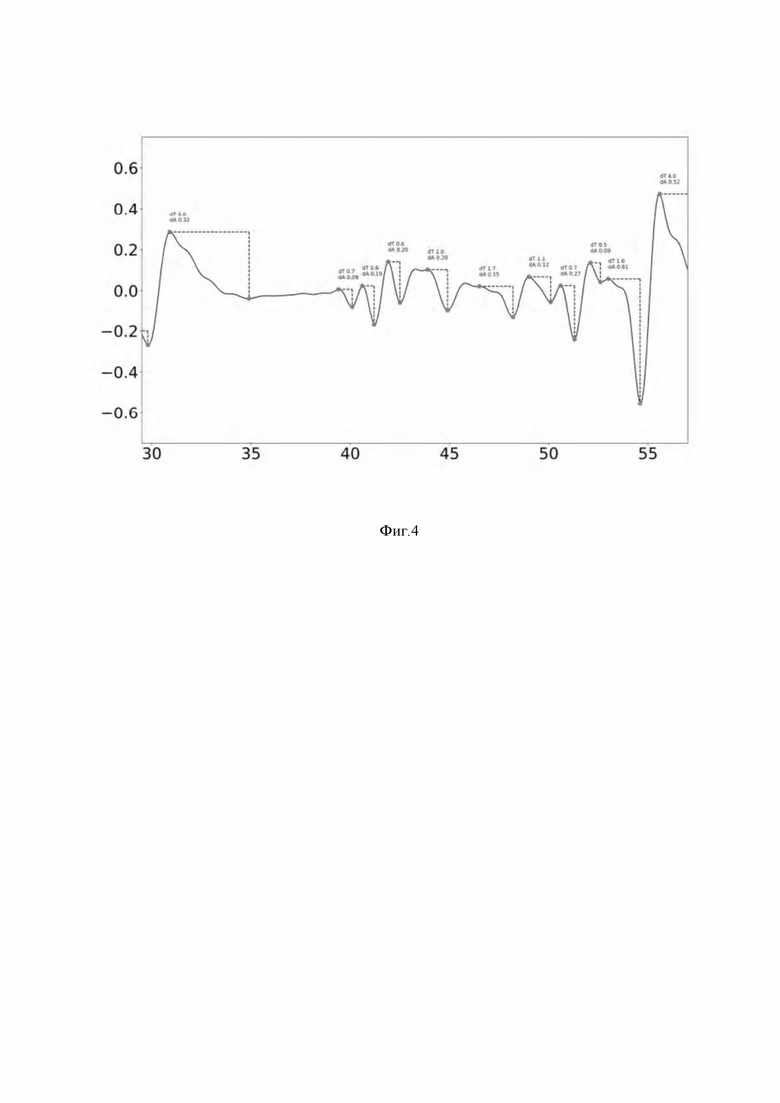
[0033] Как показано на фиг. 1(A)-1(C), Ом воспроизводит динамику нейрональной активности функциональных моторных вызванных потенциалов (фМВП). Функциональные МВП могут быть измерены, например, через: (i) задержку после каждого импульса ЭЭС; (ii) длительность; (iii) амплитуду; и (iv) количество пиков между марой максимального и минимального экстремумов (как показано на фиг. 4).
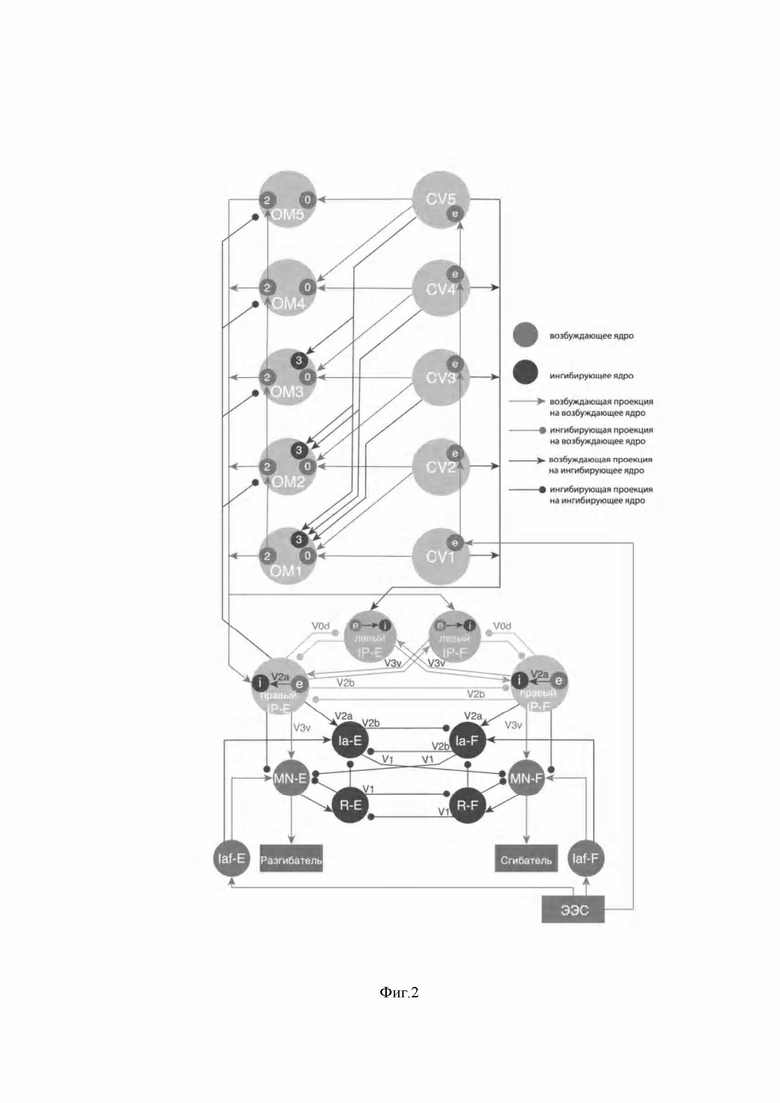
[0034] Фиг. 2 показывает детальную диаграмму модели многоуровневой спинномозговой локомоторной сети (мСЛС) в соответствии с вариантами реализации настоящего изобретения. В течение шагательных движений генерация фМВП вызывается последовательной активацией моносинаптического и полисинаптического уровней через комплексные входы от кожных вентральных (CV) чувствительных афферентов и импульсов ЭЭС, тем самым усиливая нейронную активность CV с 1 по 5 (как показано на фиг. 2). Многоуровневая СЛЦ включает полисинаптический уровень 20 (связанный с полисинаптическими фМВП) и моносинаптический уровень 30 (связанный с моносинаптическими фМВП). Моносинаптический уровень 30 включает мотонейроны (MN-E, MN-F), афферентные волокна (Iaf-E, Iaf-F), интернейроны, которые связаны с Ia-афферентами, ингибирующие мотонейроны (Ia-E, Ia-F) мышцы-антагониста и клетки Реншоу (R-E, R-F), которые защищают мышцы от сильных сокращений, формируя отрицательную обратную связь. Как показано на фиг. 2, этот уровень возбуждается Ia-афферентами, активирующимися, например, ЭЭС. Полисинаптический уровень 20 формирует полисинаптические ответы, которые обычно длиннее, чем моносинаптические, но имеют меньшие максимальные амплитуды, тем самым создавая сложные нейронные структуры. Полисинаптический уровень 20 состоит из 5 слоёв, показанных на фиг. 2.
[0035] Количество слоёв полисинаптического уровня 20 соответствует количеству задержек полисинаптических фМВП. Каждый из 5 слоёв содержит его собственный ОМ (как показано на фиг. 1) и формируется через 2 мотива: взаимное возбуждение (фиг. 1(B)) и ингибирующую обратную связь (фиг. 1(C)), который, в свою очередь, содержит ингибирующее ядро, регулирующее длительность нейрональной активности ОМ и обеспечивающее своевременную генерацию нейронных выходов. То есть полисинаптический уровень 20 включает, как показано на фиг. 2, CV с 1 по 5, ОМ с 1 по 5, возбуждающую (e) и ингибирующую (i) части интернейронального пула: IP-E, IP-F, где верхний регистр буквы E означает ядра мышцы-разгибателя, F - мышцы-сгибателя. Каждый CV представляет собой набор восходящих волокон, которые активируются кожным входом и формирующие базовую активность соответствующего CV, и также активируемые, например, усилением ЭЭС электрической активности волокон и ядер.
[0036] Повышенная задержка между моносинаптическими и полисинаптическими ответами формируется за счёт ингибирования нижних слоёв верхними слоями (как показано на фиг. 2), возбуждающих проекций на ингибирующее ядро. Более высокие CV с 3 по 5 ингибируют более низкие ОМ с 1 по 3. Каждый слой активируется сенсорными афферентами или кожными вентральными CV с 1 по 5 и/или ЭЭС.
[0037] Существует 2 модели режима полисинаптического уровня мышцы-разгибателя. Первый режим - это режим стояния, где каждый ОМ активируется совместным воздействием CV с 1 по 5 и ЭЭС. Кожные афференты активируются в зависимости от распределения веса тела от носка к пятке. Во второй модели (режим взмаха) полисинаптический уровень 20 работает последовательно независимо от активации CV, потому что кожный вход (CV) не активируется, когда стопа находится в воздухе. Таким образом, ОМ 1 (показанный на фиг. 2) активируется от ЭЭС и CV 1 другой ноги.
[0038] Фиг. 3 показывает миограмму паттернов фМВП в ответ на импульсы ЭЭС для мышцы-разгибателя (камбаловидная мышца) и мышцы-сгибателя (передняя большеберцовая мышца) с выраженной задержкой для каждого среза (период между импульсами ЭЭС составляет 40 Гц). Во время режима стояния первый импульс ЭЭС и кожные афференты активирует ОМ 1 посредством нейронных групп CV 1 (как показано на фиг. 2). Это вызывает нейронную активность первого среза (от 13 до 15 миллисекунд (мс)), как показано на фиг. 3. Следующий импульс ЭЭС и вес тела, перенесённый с пятки к носку, активируют группы нейронов CV 1 и CV 2 и вызывают (через проекции CV) активацию Ом 1 и Ом 2, тем самым генерируя расширенные фПМВ с высокими амплитудами на следующем срезе (с 13 до 21 мс). Третий импульс ЭЭС и перенос веса активируют CV 3, что задействует ОМ 2 и позднее Ом 3, которые генерируют длительные фМВП (от 15 до 23 мс) и фМВП (от 0 до 3 мс) на 4-м срезе. CV 3 ингибирует ОМ 1, подающий ингибирующую обратную связь.
[0039] Четвёртый и пятый импульсы ЭЭС и переносы веса приближаются к проекциям кожных афферентов носка на CV 4 - ОМ 3 и ОМ 4 (19 мс), что создаёт короткую и интенсивную активность срезов 4 и 5 и срезов 5 и 6 (от 19 до 25 мс и от 0 до 3 мс соответственно) и ингибирует ОМ 1 и ОМ 2. Шестой импульс ЭЭС имеет специальную функцию, которая активирует ОМ 5 с помощью CV 5 совместно с переносом веса на носок и ингибирует ОМ 1 через ОМ 3 (как показано на фиг. 2), тем самым эффективно предотвращая генерацию ими ранних ответов и проецируя короткую нейрональную активность с относительно высокой амплитудой.
[0040] Во время режима взмаха, учитывая отсутствие кожного входа, на фиг. 3 показаны 3 задержки, а именно: 17 мс, 12 мс и 20 мс, и длительности - 17 мс, 44 мс и 5 мс. Структура 5-го слоя, изображённая на фиг. 2, порождает паттерн функциональных МВП мышцы-сгибателя, показанный на миограмме фиг. 3. Более точно, первый импульс ЭЭС через CV 1 активирует ОМ первого и второго слоя. Сначала активируется ОМ 1 и 0-й и 1-й возбуждающие ядра ОМ 1 (как показано на фиг. 2) задействуют второе ядро ОМ 2. Это вызывает начало сильной активности фМВП с 17 мс на 7 срезе и пока 3 мс на 8 срезе (показано на фиг. 3TA). Второй импульс ЭЭС активирует CV 2 вместе с CV 1, что эффективно усиливает выходной фМВП с 17 мс до 25 мс среза 8 (показано на фиг. 3TA). Третий и четвёртый импульсы ЭЭС активируют ОМ 3 через CV 3 и CV 4, и ядро 2 третьего ОМ задействует ОМ 4 (как показано на фиг. 2). Эта пара образует длинные и интенсивные фМВП, начинающиеся с 12 мс на 9 срезе до 6 мс на 11 срезе (показано на фиг. 3TA). Затем, 5 импульс ЭЭС задействует CV 5, производит проекцию из ядра 0 ОМ 4 к ядру 0 ОМ 5 и активирует ОМ 5 (как показано на фиг. 2). Это производит нейронные импульсы от 20 до 25 мс на 11 срезе.
[0041] Режим сгибателя организован последовательным способом активации ОМ, когда вторые ядра запускают следующие ОМ (как показано на фиг. 2). Правый IP-E и левый IP-E имеют тормозные пресинаптические проекции, которые ингибируют возбуждающие проекции на вторые ядра ОМ во время режима стояния, который активируется через CV 1-5. Во время режима взмаха эти проекции играют важную роль в формировании паттерна сгибателя.
[0042] В соответствии с вариантами реализации настоящего изобретения для обнаружения паттерна нейронных ответов на ЭЭС и кожные входы используются 2 основных модели входной стимуляции мСЛС. Главным образом, воздействие кожных входов применяется к моносинаптическому уровню 30, который работает одновременно для правой и левой ноги. Равновесие между правой и левой ногой имеет диагональную природу - когда разгибатель правой ноги активируется в ответ на кожный вход, сгибатель левой ноги также активен. С другой стороны, когда разгибатель левой ноги активен, сгибатель правой ноги активируется, а всё остальное ингибируется.
Анализ выявленных паттернов нейронных ответов
[0043] В соответствии с вариантом реализации настоящего изобретения анализ выявленного паттерна нейронного ответа описан выше на основе вычисления функциональных моторных вызванных потенциалов (фМВП) и анализа сложных паттернов, произведённых нейронной сетью. В частности, пики рассматриваются как пары экстремумов: сначала максимум, а потом минимум, как это изображено на фиг. 4. Разница (Δ) между максимальным и минимальным значениями есть амплитуда пика, длительность пика=tmin-tmax (как показано на dA фиг. 4). В соответствии с вариантами реализации настоящего изобретения для использования в качестве пика длительность пика должна быть в диапазоне между 0,15 мс и 4 мс и амплитуда должна составлять не менее 3% от максимальной амплитуды фМВП, как показано на фиг. 4. Самые низкие пороги времени и амплитуды могут быть определены путём взятия 15-го и 25-го процентилей всех пиков и сравнения различных порогов времени и амплитуды. Интервалы, указанные здесь, позволяют избежать на миограммах длинных волн, которые не являются пиками или “шумоподобными” пиками.
[0044] В соответствии с вариантами реализации настоящего изобретения миограммы анализируют для определения устойчивых паттернов любым подходящим методом, например, ядерная оценка плотности (ЯОП). Как показано на фиг. 3 и 5, использование данных in vivo и in silico из различных моделей, например, AIR, TOE, PLT, QPZ, STR, NEURON и/или GRAS, устойчивый паттерн может быть идентифицирован с определённым количеством пиков, относительной объединённой амплитудой и задержкой.
[0045] В соответствии с вариантами реализации настоящего изобретения, данные могут быть валидированы с помощью KDE-теста. В частности, валидация данных in silico с помощью миограмм in vivo требует универсального представления наборов данных. Данные in vivo или пакеты миограмм записываются с биологической модели (животного) во время его движения, что само по себе потенциально создаёт нежелательные артефакты, например, сдвиг нулевой точки, что является неприемлемым в контексте валидации данных in silico, поскольку симуляционные данные не включают его, так как модель in silico не предусматривает сдвига электродов. Чтобы компенсировать сдвиг нулевой точки, собственные векторы PCA могут быть использованы для поворота центральных точек в пакетах миограмм в модели in silico.
[0046] В соответствии с вариантами реализации настоящего изобретения, в свете различной природы полисинаптических и моносинаптических фМВП, могут быть использованы 2 различных способа анализа паттернов нейронных ответов. Во-первых, фМВП указывают на регулярность пиков в диапазоне от 3 мс до 8 мс на каждом срезе данных in vivo и in silico (как показано на фиг. 3). С другой стороны, паттерн полисинаптических фМВП имеет пирамидальную природу плотности пиков, например, в режиме PLT в диапазоне от 8 мс до 25 мс и от 0 мс до 3 мс следующего среза (как показано через KDE и изображено на фиг. 5). Граница между моно- и полисинаптическими фМВП выбрана с помощью анализа плотности пиков, которые не попадают в интервал моносинаптических фМВП, например, в диапазоне от 8 мс до 25 мс.
[0047] В дальнейшем задержка между ответами определяет наличие более чем 1 ядра, генерирующего ответы, а её значение определяет число синапсов между активацией каждого ядра из расчёта одной синаптической задержки 2 мс. Число пиков определяет распределение задержек и весов проекций в ядре (как показано на фиг. 5). Разница относительных амплитуд определяет наличие более чем одного ядра с разной нейрональной активностью (как показано на фиг. 5). Длительность ответа скоррелирована с числом пиков и определяет распределение задержек и, если общая длительность больше, чем 1 синаптическая задержка, наличие внутренней топологии ядра с несколькими синаптическими связями.
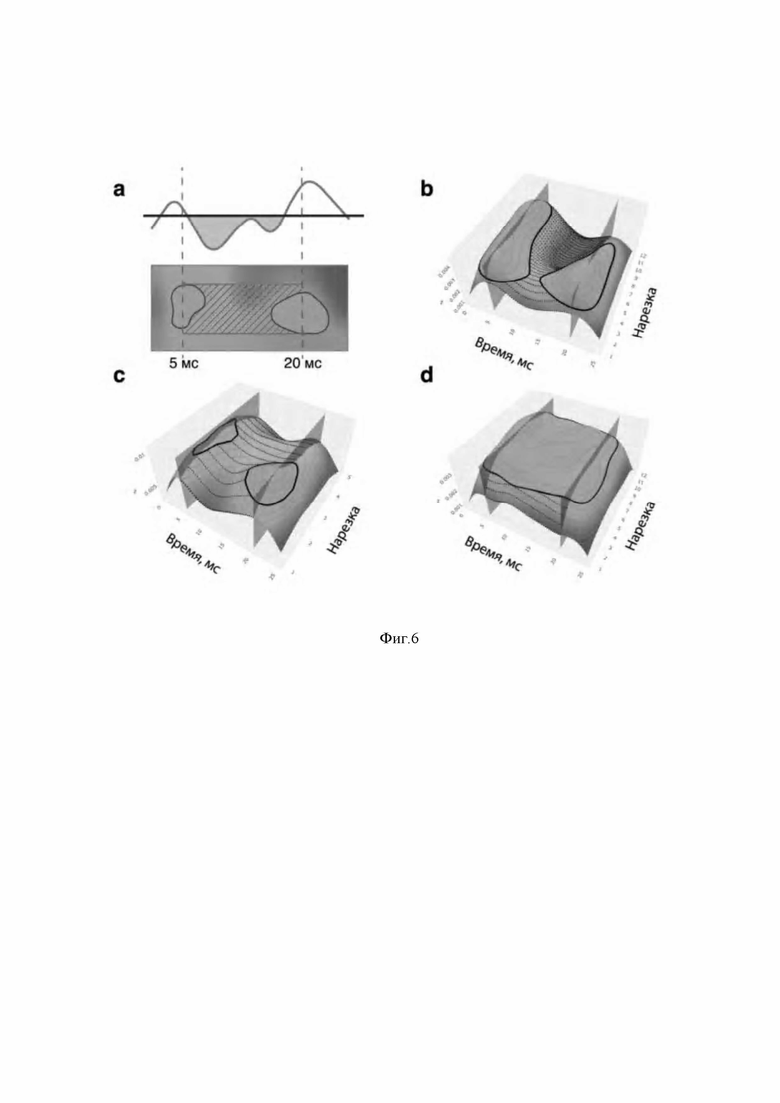
[0048] Как показано на фиг. 6, задержка определяется как время (расстояние) между моно- и полисинаптическими фМВП во временном промежутке между 5 мс и 20 мс, где есть наложение с моносинаптическими фМВП, которые имеют место между 3 мс и 8 мс, и гарантированными полисинаптическими фМВП, находящимися между 8 мс и 25 мс. Для определения и измерения общего значения задержки каждого набора фМВП каждой модели in vivo в каждом режиме может быть использована 3D-карта KDE методом сравнения величин ниже пороговой горизонтали. Пороговая горизонталь определяется нижеследующей формулой для моделей QPZ/STR:
горизонтальпорог = 2/3 (max+min)
и моделей AIR/TOE/PLT:
горизонтальпорог = 1/2 (max+min),
где max есть максимальное значение плотности пиков, а min - минимальное значение плотности пиков в текущем наборе данных фМВП.
[0049] В соответствии с вариантами реализации настоящего изобретения паттерн нейронного ответа может быть в дальнейшем валидирован с учётом низкоуровневых деталей объёма задержек моно- и полисинаптических фМВП между моно- и полисинаптическими фМВП, числом пиков, амплитуд моно- и полисинаптических фМВП, а также формы полисинаптических паттернов (показана на фиг. 3) любым подходящим методом, например, с помощью KDE-теста.
Воссоздание паттернов/топологии нейронной цепи
[0050] В соответствии с вариантами реализации настоящего изобретения результаты, описанные выше, такие как (i) приближенное число ядер, (ii) приближённые задержки между активацией каждого ядра, (iii) диапазон распределения весов и задержек каждой проекции (синаптической связи) и (iv) типы нейронов для каждого ядра, используются для воссоздания топологии нейронного контура с известными типами нейронов, которые формируют выходной сигнал. В соответствии с вариантами реализации настоящего изобретения для воссоздания топологии нейронного контура могут быть использованы 2 уровня абстракции - высокоуровневая топология и низкоуровневая топология. В частности, высокоуровневая топология ядер учитывает задержку между ответами нейронов, относительную амплитуду и количество пиков каждого ответа. Для воссоздания низкоуровневой топологии определяются продолжительность, совокупная амплитуда и число пиков ответа, распределение весов проекций и латентностей в пределах одной синаптической задержки. Например, если продолжительность превышает 1 синаптическую задержку, предполагается нейронная топология внутри ядра, с учётом числа нейронов на ядро и распределения параметров их связей. Затем, используя время активации ядра с учётом входной активности определяются взаимно возбуждающие проекции ядра. В дополнение, возможно использование кластеризации для определения нейронов, которые производят спайк, в случае высокой частоты дискретизации записи нейрональной активности. При применении упомянутых методов нейронная топология может быть воссоздана с использованием известных мотивов нейронов, например в ЦНС. Топология нейронного микроконтура может быть реализована в устройстве ЦГУА, которое может генерировать электрические сигналы, совместимые с биологической нейронной стимуляцией, для активации двигательной функции конечности.
[0051] Фиг. 7 иллюстрирует нейроморфную систему протезирования 100. В соответствии с вариантами реализации настоящего изобретения нейроморфная система протезирования 100 сконфигурирована для облегчения ходьбы у пациентов с полной или частичной ТСМ и парализованными ногами. Нейроморфная система протезирования 100 включает для каждой конечности контроллер голеностопа 110 и контроллер бедра 115, устройство ЦГУА 130 и стимуляторы 150. Контроллеры 110, 115 - это устройства обработки данных, которые получают входные данные с датчиков давления 160, которые могут быть расположены на стельке, и с датчиков изгиба 170, которые могут быть расположены вокруг голеностопа и/или колена. Контроллер голеностопа 110 может быть расположен вокруг щиколотки и может передавать данные на контроллер бедра 115. Контроллер бедра 115 осуществляет предобработку данных, полученных из контроллера щиколотки 110, и объединяет данные, полученные из контроллера голеностопа 110, с данными, полученными контроллером бедра 115 от датчиков изгиба 170. Затем контроллер бедра 115 передаёт объединённые данные центральному устройству реализации ЦГУА 130.
[0052] Центральное устройство ЦГУА 130 может быть реализовано как синхронизированный набор одноплатных цифровых компьютеров (например, PINE A 64) (как показано на фиг. 8) или спайковых (аналоговых) схем (как показано на фиг. 9), реализующий центральный генератор упорядоченной активности топологии сегмента спинного мозга или интегральной схемы с той же функциональностью. Устройство ЦГУА 130 реализует биореалистичную топологию генератора паттерна хождения, который способен подавать электрические сигналы, совместимые с биологической нейронной стимуляцией, на мышцы нижних конечностей. Нейронная топология ЦГУА описана детально на фиг. 2 как 2 уровня топологии (моносинаптический и полисинаптический) генератора двигательного паттерна с пятью слоями полисинаптического уровня генератора двигательного паттерна. Устройство ЦГУА 130 может также устанавливать равновесие между парами мышц сгибатель-разгибатель и левой и правой ногами.
[0053] Стимуляторы 150 могут включать стимулятор спины 158, стимулятор левого голеностопа 151, стимулятор правого голеностопа 153, стимулятор правого бедра 157 и стимулятор левого бедра 159. Стимуляторы 150 могут быть электродами, размещёнными на мышцах, нервах, сплетениях, или для чрескожной стимуляции спинного мозга. Стимуляторы 150, 250 могут быть одноканальными или многоканальными стимуляторами, предназначенными для стимуляции в соответствии с вариантами реализации настоящего изобретения.
[0054] Выход CPG запускает стимуляторы 151, 153, 157, 158, 159, которые иннервируют мышцы нижних конечностей (бедра и стопы) через восходящие нервы или непосредственно, тем самым передавая паттерн ходьбы индивидуально каждой паре мышц сгибатель-разгибатель. Мышцы, в свою очередь, устанавливают баланс веса в направлении движения, что изменяет распределение веса, регистрируемое датчиками давления 160, и углы сгибания суставов, регистрируемые датчиками сгибания 170.
[0055] Система 100 может быть разомкнутой или замкнутой системой обратной связи. В некоторых вариантах реализации контроллеры 110, 115 могут взаимодействовать с внешней вычислительной системой (не показана). Например, на внешней вычислительной системе пользователь может определить программу стимуляции, которая затем может быть загружена на контроллеры 110, 115 или, альтернативно, на центральное устройство реализации CPG 130.
[0056] В соответствии с другим вариантом реализации настоящего изобретения цифровая нейроморфная система протезирования 200 показана на фиг. 8. Цифровая нейроморфная система протезирования 200 включает контроллер голеностопа 210 и контроллер стельки 225, устройство ЦГУА 230, стимулятор 250, датчики давления 260, цифроаналоговый преобразователь (ЦАП) 220 и последовательный порт 240 универсального асинхронного приёмника-передатчика (УАПП). Согласно этому варианту реализации устройство ЦГУА 230 может быть одноплатным компьютером.
[0057] При этом входные сигналы формируются через распределение веса “от носка к пятке” и обрабатываются контроллером стельки 225. От контроллера стельки 225 данные датчиков давления передаются через последовательный порт 240 УАПП на центральное устройство генератора паттернов 230 (одноплатный компьютер), где разница весов данных “от носка к пятке” с датчиков используется в качестве входа для устройства реализации ЦГУА 230. Устройство ЦГУА 230 генерирует цифровые локомоторные паттерны в режиме реального времени для мышц задних конечностей и запускает стимулятор 250 через ЦАП 220. То есть ЦАП 220 преобразует электрические сигналы стимуляторов 250 в сигналы тока в безопасном для человека диапазоне стимуляции нервов/мышц, например, от -100 до +100мА.
[0058] В соответствии с ещё одним вариантом реализации настоящего изобретения спайковая (аналоговая) нейроморфная система протезирования показана на фиг. 9. Спайковая (аналоговая) нейроморфная система протезирования включает контроллер голеностопа 310 и контроллер стельки 325, спайковое устройство ЦГУА 330, стимулятор 350, датчики давления 360 и цифроаналоговый преобразователь (ЦАП) 340.
[0059] При этом входные сигналы формируются через распределение веса “от носка к пятке” и обрабатываются контроллером стельки 325. От контроллера стельки 325 данные датчиков давления передаются на спайковое устройство ЦГУА 330 через ЦАП 340. Спайковое устройство ЦГУА генерирует паттерн хождения с определенной частотой и длительностью, которые соответствуют скорости ходьбы. Паттерн ходьбы генерируется аналоговым устройством ЦГУА 330 и передаётся на стимулятор 350, который иннервирует нисходящие нервы, для активации мышцы.
Пример # 1 (Осцилляторный мотив)
[0060] Краткий обзор
[0061] Для воссоздания базового контурного мотива более сложных нейронных сетей в центральной нервной системе (ЦНС) вводится новый подход симуляции осцилляторного мотива. Микроконтур осцилляторного мотива строится на основе четырёх частых мотивов в центральной нервной системе: ингибирующей обратной связи, ритмичного возбуждения, дивергенции и конвергенции. Симуляция показывает четыре основных режима генерации нейронной активности с минимальными весами связей между четырьмя ядрами, максимальными весами между ядрами, весами между максимальным и минимальным и участием ингибирующих ядер, которые эффективно подавляют выходную нейрональную активность. Для тестирования осцилляторного мотива сравнением генерируемой активности использовались 2 нейросимулятора - NEURON и GRAS.
[0062] Введение
[0063] Мы используем одно из возможных решений для воссоздания микроконтура базового осцилляторного мотива (ОМ), которая может быть использована в центральном генераторе упорядоченной активности (ЦГУА) спинного мозга, его обоснование и валидацию через нейросимуляцию с использованием двух симуляторов: NEURON (См. Hines, M., Carnevale, N.: Среда симуляции NEURON., 2nd edn. (2003)); NEST (Jordan, J., Ippen, T., Helias, M., Kitayama, I., Sato, M., Igarashi, J., Diesmann, M., Kunkel, S.: Extremely scalable spiking neuronal network simulation code: From laptops to exascale computers. Frontiers in Neuroinformatics 12, 2 (2018)) и новый симулятор GRAS, запрограммированный на языке C++.
[0064] Обзор мотивов
[0065] Существует несколько работ, посвящённых структуре спинного мозга и описывающих микроконтуры (см. Ampatzis, K., Song, J., Ausborn, J., El Manira, A.: Separate Microcircuit Modules of Distinct V2a Interneurons and Motoneurons Control the Speed of Locomotion. Neuron 83(4), 934{943 (2014)); Chopek, J.W., Nascimento, F., Beato, M., Brownstone, R.M., Zhang, Y.: Subpopulations of Spinal V3 Interneurons Form Focal Modules of Layered Pre-motor Microcircuits. Cell Reports 25(1), 146156.e3 (2018); Deska-Gauthier, D., Zhang, Y.: The functional diversity of spinal interneurons and locomotor control. Current Opinion in Physiology 8, 99-108 (2019)), начиная с базовых исследований, описывающих рефлекторную дугу (см. Ilya A. Rybak, Kimberly J. Dougherty, Natalia A. Shevtsova: Organization of the Mammalian Locomotor CPG: Review of Computational Model and Circuit Architectures Based on Genetically Identifed Spinal Interneurons. eNeuro (2015); Markin, S.N., Klishko, A.N., Shevtsova, N.A., Lemay, M.A., Prilutsky, B.I., Rybak I.A.: Afferent control of locomotor CPG: insights from a simple neuromechanical model: Afferent control of locomotor CPG. Annals of the New York Academy of Sciences 1198(1), 21-34 (2010); Rybak, I.A., Shevtsova, N.A., Lafreniere-Roula, M., McCrea, D.A.: Modelling spinal circuitry involved in locomotor pattern generation: insights from deletions during fictive locomotion. The Journal of physiology 577(2), 617-639 (2006)), до наиболее прогрессивных подходов, включающих многоуровневые модели генераторов ритмических паттернов (см., напр., van den Brand, R., Heutschi, J., Barraud, Q., DiGiovanna, J., Bartholdi, K., Huerlimann, M., Friedli, L., Vollenweider, I., Moraud, E.M., Duis, S., Dominici, N., Micera, S., Musienko, P., Courtine, G.: Restoring Voluntary Control of Locomotion after Paralyzing Spinal Cord Injury. Science 336(6085), 1182-1185 (2012); Capogrosso, M., Wenger, N., Raspopovic, S., Musienko, P., Beauparlant, J., Bassi Luciani, L., Courtine, G., Micera, S.: A Computational Model for Epidural Electrical Stimulation of Spinal Sensorimotor Circuits. Journal of Neuroscience 33(49), 19326-19340 (2013); Moraud, E.M., Capogrosso, M., Formento, E., Wenger, N., DiGiovanna, J., Courtine, G., Micera, S.: Mechanisms Underlying the Neuromodulation of Spinal Circuits for Correcting Gait and Balance Deficits after Spinal Cord Injury. Neuron 89(4), 814-828 (2016); Wagner, F.B., Mignardot, J.B., Go-Mignardot, C.G.L., Demesmaeker, R., Komi, S., Capogrosso, M., Rowald, A., Se_a~nez, I., Caban, M., Pirondini, E., Vat, M., McCracken, L.A., Heimgartner, R., Fodor, I., Watrin, A., Seguin, P., Paoles, E., Keybus, K.V.D., Eberle, G., Schurch, B., Pralong, E., Becce, F., Prior, J., Buse, N., Buschman, R., Neufeld, E., Kuster, N., Carda, S., Zitzewitz, J.v., Delattre, V., Denison, T., Lambert, H., Minassian, K., Bloch, J., Courtine, G.: Targeted neurotechnology restores walking in humans with spinal cord injury. Nature 563(7729), 65 (2018)). Формирование двигательного паттерна исторически было объяснено набором ядер, обычно с взаимным ингибированием или цикличным ингибированием и/или возбуждающими проекциями и активностью (см., напр., Ampatzis, K., Song, J., Ausborn, J., El Manira, A.: Separate Microcircuit Modules of Distinct V2a Interneurons and Motoneurons Control the Speed of Locomotion. Neuron 83(4), 934-943 (2014)); Chopek, J.W., Nascimento, F., Beato, M., Brownstone, R.M., Zhang, Y.: Subpopulations of Spinal V3 Interneurons Form Focal Modules of Layered Pre-motor Microcircuits. Cell Reports 25(1), 146156.e3 (2018)). В то же время структура формирования паттерна и организация микроконтура, применяемого для генерации двигательного паттерна, остаются неизученными (см., напр., Gad, P., Lavrov, I., Shah, P., Zhong, H., Roy, R.R., Edgerton, V.R., Gerasimenko, Y.: Neuromodulation of motor-evoked potentials during stepping in spinal rats. Journal of Neurophysiology 110(6), 1311-1322 (2013)). Повторяющиеся устойчивые мотивы нейронных микроконтуров (см. English, D.F., McKenzie, S., Evans, T., Kim, K., Yoon, E., Buzs_aki, G.:Pyramidal Cell-Interneuron Circuit Architecture and Dynamics in Hippocampal Networks. Neuron 96(2), 505-520 (2017)) найдены в головном и/или спинном мозге (см., напр., Chopek, J.W., Nascimento, F., Beato, M., Brownstone, R.M., Zhang, Y.: Subpopulations of Spinal V3 Interneurons Form Focal Modules of Layered Pre-motor Microcircuits. Cell Reports 25(1), 146156.e3 (2018)). В ходе анализа были использованы следующие критерии: (1) генератор с взаимным возбуждением как минимум двух ядер (2) управление должно осуществляться через третьи ядра, чтобы после периода активности ингибировать нейрональную активность генератора (3) весь мотив должен быть саморегулируемым и самоорганизующимся с помощью обучения пластичности, зависящей от времени спайка (см., напр., van den Brand, R., Heutschi, J., Barraud, Q., DiGiovanna, J., Bartholdi, K., Huerlimann, M., Friedli, L., Vollenweider, I., Moraud, E.M., Duis, S., Dominici, N., Micera, S., Musienko, P., Courtine, G.: Restoring Voluntary Control of Locomotion after Paralyzing Spinal Cord Injury. Science 336 (6085), 1182-1185 (2012)).
[0066] Способ
[0067] Учитывая специфику генерации нейрональной активности, предлагается ключевой низкоуровневый компонент сложной цепи, называемый осцилляторным мотивом (ОМ) (фиг. 1a). Исходный проект был открыт в работах Паза (Paz, J.T., Huguenard, J.R.: Microcircuits and their interactions in epilepsy: is the focus out of focus? Nature Neuroscience 18(3), 35-359 (2015)); Уомелсдорфа (Womelsdorf, T., Valiante, T.A., Sahin, N.T., Miller, K.J., Tiesinga, P.: Dynamic circuit motifs underlying rhythmic gain control, gating and integration. Nature Neuroscience 17(8), 1031-1039 (2014)) и … (English, D.F., McKenzie, S., Evans, T., Kim, K., Yoon, E., Buzs_aki, G.: Pyramidal Cell-Interneuron Circuit Architecture and Dynamics in Hippocampal Networks. Neuron 96(2), 505-520 (2017)) и основан на повторяющемся или ритмическом возбуждении двух ядер (фиг. 1b), ингибирующей обратной связи (фиг. 1c), дивергенции (фиг. 1d) и конвергенции (фиг. 1e). Основная функция ОМ заключается в генерации нейрональной активности в течение заданного периода от 2 мс до 15 мс. С этой целью используется ритмический возбуждающий мотив, который включает 2 ядра с взаимными возбуждающими проекциями (фиг. 1b, ядра 1,2), которые производят расширенную нейрональную активность. Для прекращения активности используются 2 мотива с ингибирующей обратной связью (фиг. 1c, ядра 1,3) со слабыми возбуждающими и сильными ингибирующими проекциями, которые определяют продолжительность нейрональной активности. Входная электрическая активность, указанная стрелкой на ядро 1, вызывает взаимное возбуждение 1 и 2, что обеспечивает выходную нейрональную активность и слабо возбуждает третье ядро. Когда нейроны третьего ядра достигают их порога, эти нейроны сильно тормозят активность первого и второго ядер. Баланс слабых входных проекций и сильных выходных проекций ядра 3 определял длительность выходной нейрональной активности ОМ.
[0068] Результаты
[0069] С помощью нейросимулятора NEURON модель нейрона Ходжкина-Хаксли (см. Hodgkin, A.L., Huxley, A.F.: A quantitative description of membrane current and its application to conduction and excitation in nerve. The Journal of Physiology 117(4), 500-544 (1952)) была использована со следующими параметрами: ёмкость мембраны 1 мкФ/см2, удельное сопротивление 100 Ом/см, натриевые и калиевые каналы использовались с проводимостью 0:2 См/см2 и 0:4 См/см2 (см. Dougherty, K., Kiehn, O.: Firing and Cellular Properties of V2a Interneurons in the Rodent Spinal Cord. The Journal of neuroscience : the official journal of the Society for Neuroscience 30, 24-37 (2010)). Модель является многоуровневой и содержит сому, дендриты и аксон, каждая часть представлена в виде одного уровня. Диаметр сомы нейрона находятся в интервале от 3 мкм до 8 мкм (см. Chen, S., Yang, G., Zhu, Y., Liu, Z., Wang, W., Wei, J., Li, K., Wu, J., Chen, Z., Li, Y., Mu, S., OuYang, L., Lei, W.: A Comparative Study of Three Interneuron Types in the Rat Spinal Cord. PLOS ONE 11(9), e0162969 (2016)). ОМ сочетает 2 типа компонентов: 2 ядра, которые активируют друг друга, генерируя таким образом расширенную активность (фиг. 1b) и 3 ядра, формирующие отрицательную обратную связь (фиг. 1c), а также дивергенцию (фиг. 1d) и конвергенцию (фиг. 1e). Каждое ядро содержит 50 нейронов с синапсами в диапазоне от 30 до 50 для каждой проекции. Баланс между возбуждающими и ингибирующими весами обеспечивает множество спайковой активности (фиг. 10). Ом создаёт последовательность спайков со слабыми ингибирующими проекциями, а также слабыми возбуждающими к третьему ядру (фиг. 10a). Частота выходного сигнала из второго ядра приблизительно равна 120 Гц, пока третье ядро находится в подпороговом состоянии. Активность продолжается 50 мс и не уменьшается. Когда ингибирующие и возбуждающие проекции сильные, нейрональная активность резко сокращается, так как 1 ядро активирует второе, которое порождает 1 выходной сигнал, а третье ядро затем сильно подавляет одновременно оба возбуждающих ядра (показано на фиг. 10b). Число спайков регулируется разницей между возбуждающими и ингибирующими весами, когда связи между возбуждающими ядрами (1 и 2) и 3-м ядром слабые. В то время, когда ингибирующие проекции являются сильными, выходное ядро производит два усредненных пика от 7 мс до 20 мс. Возбуждающие ядра постепенно увеличивают потенциал третьего ядра. Когда он превышает пороговое значение активирует и ингибирует первое и второе ядра (показано на фиг. 10c). Продолжительность выходной нейрональной активности также зависит от внешних сигналов, которые запускают третье ядро. Если вес ингибирующего соединения достаточный, выходная активность останавливается (фиг. 10d).
[0070] Вторая серия экспериментов (фиг. 10 a2, b2, c2, d2) посвящена тестированию ОМ в симуляторе GRAS. GRAS был создан для GPU-обработки биореалистичной нейронной сети с использованием языка программирования C++ и технологии Nvidia CUDA. С помощью нейросимулятора GRAS модель нейрона Ходжкина-Хаксли была использована со следующими параметрами: ёмкость мембраны 1 мкФ/см2, удельное сопротивление 100 Ом/см. Модель представляет собой одно отделение.
[0071] Третья серия экспериментов (фиг. 10 a3, b3, c3, d3) посвящена тестированию ОМ на нейросимуляторе NEST (см. Jordan, J., Ippen, T., Helias, M., Kitayama, I., Sato, M., Igarashi, J., Diesmann, M., Kunkel, S.: Extremely scalable spiking neuronal network simulation code: From laptops to exascale computers. Frontiers Neuroinformatics 12, 2 (2018)). Модель нейрона Ходжкина-Хаксли использовалась со следующими параметрами: ёмкость мембраны 1 мкФ/см2, удельное сопротивление 100 Ом/см, натриевые и калиевые каналы использовались с проводимостью по умолчанию. Модель представляет собой одно отделение.
[0072] Обсуждение
[0073] Сравнение первого режима со слабыми проекциями между ядрами 1, 2, 3 (фиг. 10 a1, a2) указывает на более низкую синаптическую задержку, используемую в GRAS, и более высокие амплитуды спайков в симуляторе NEURON. Второй режим с самым высоким весом проекций между ядрами 1, 2 и 3 (фиг. 10 b1, b2) показывает более короткие спайки и рефракторные периоды, используемые в GRAS, хотя аналогично с симуляцией в NEURON оба ядра, 1 и 2, производят один спайк перед тем, как третье ядро интенсивно ингибирует их.
[0074] В третьем режиме (фиг. 10 c1, c2), когда веса находятся между первым и вторым режимами симуляции NEURON, ядро 3 генерирует ингибирующую спайковую активность позже, чем аналогичную во втором режиме в GRAS.
[0075] В целом наблюдается высокая схожесть результатов симуляции в NEST и GRAS. Сравнение активности ОМ с низкими весами ядер 1, 2, 3 (фиг. 10 a1, a2, a3) указывает на более высокую частоту спайков 7 для NEST и 7 для GRAS, чем 6 для NEURON, За счёт более короткого рефрактерного периода в течение всей симуляции 50 мс. Самые высокие веса, используемые во втором эксперименте (фиг. 10 b1, b2, b3), показывают что результаты NEST, близкие к симулятору GRAS, с аналогичными равноудаленными спайками в течение 15 мс, что объясняется близкими моделями с относительно меньшим количеством деталей, чем в симуляторе NEURON. Фиг. 10 c1, c2, c3 представляют результаты симуляции ОМ с весами в середине интервала между первым и вторым экспериментами, где наблюдаются короткие серии спайков 2 в NEURON и 3 в NEST, симуляторы NEST с уменьшенной амплитудой в течение 20 мс. Проекция к ядру 3 увеличивает ингибирующее воздействие на ядра 1 и 2 и приводит к низкой амплитуде подпороговой нейрональной активности (фиг. 10 d1, d2, d3).
[0076] Заключение
[0077] Данный пример 1 показывает, что ОМ, который является более сложным, чем предыдущие предложенные модели, может быть использован как базовый формирующий блок для сложных нейронных контуров, например, для генератора паттернов млекопитающего. Предложенная организация ОМ, использующая ранее описанные 4 мотива центральной нервной системы: ритмическое возбуждение, ингибирующая обратная связь, дивергенция и конвергенция, была подтверждена данными (см. фиг. 10). Были продемонстрированы результаты биореалистичной симуляции с использованием 3 нейросимуляторов. Результаты симуляции указывают, что предложенный ОМ может быть использован в сетях, отвечающих за генерацию нейрональной активности, т.е. в симуляции локомоции.
Пример # 2 (Упрощенная модель нейрона для обработки в реальном времени)
[0078] Краткий обзор
[0079] Данный пример #2 показывает упрощённую модель нейрона для обработки в реальном времени во встроенных биосовместимых устройствах. Биосовместимая модель нейрона включает работы Ижикевича (см. Izhikevich, E.: Simple model of spiking neurons. IEEE Transactions on Neural Networks 14(6), 1569-1572 (2003)) и Розенблатта (см. Rosenblatt, F.: The perceptron: a probabilistic model for information storage and organization in the brain. Psychological review 65(6), 386 (1958)) представляет структурную схему и главные принципы обработки и обучения сигналов. Была валидирована предложенная упрощённая модель нейрона (УЦН), в сравнении с другими близкими к предложенной: интегрировать-и-сработать с утечкой (LIF) и модель Ижикевича. Более того, настоящая упрощённая модель показывает лучшую производительность, чем модели Ижикевича и интегрировать-и-сработать» с утечкой, и биосовместимость с точки зрения временных параметров.
[0080] Введение
[0081] Существует несколько ранее опубликованных моделей нейрона (см., напр., Hodgkin, A.L., Huxley, A.F.: A quantitative description of membrane current and its application to conduction and excitation in nerve. The Journal of Physiology 117(4), 500{544 (1952); McCulloch, W.S., Pitts, W.: A logical calculus of the ideas immanent in nervous activity. The bulletin of mathematical biophysics 5(4), 115-133 (1943)). База данных моделей нейронов, называемая “model DB” Йельского университета, имеет в настоящее время несколько тысяч опубликованных моделей (см. McDougal, R.A., Morse, T.M., Carnevale, T., Marenco, L., Wang, R., Migliore, M., Miller, P.L., Shepherd, G.M., Hines, M.L.: Twenty years of ModelDB and beyond: building essential modeling tools for the future of neuroscience. Journal of Computational. Neuroscience 42(1), 1-10 (2017)). Одна из критичных проблем биореалистичной нейросимуляции - это время вычисления. Это особенно актуально с учетом того, что основное влияние на время вычислений оказывают синапсы и нейронные модели. Например, автономный робот (см. Lobov, S., Kazantsev, V., Makarov, V.A.: Spiking neurons as universal building blocks for hybrid systems. Advanced Science Letters 22(10), 2633-2637 (2016)) или носимый нейропротез (см., напр., Deska-Gauthier, D., Zhang, Y.: The functional diversity of spinal interneurons and locomotor control. Current Opinion in Physiology 8, 99-108 (2019); Gill, M.L., Grahn, P.J., Calvert, J.S., Linde, M.B., Lavrov, I.A., Strommen, J.A., Beck,L.A., Sayenko, D.G., Straaten, M.G.V., Drubach, D.I., Veith, D.D., Thoreson, A.R., Lopez, C., Gerasimenko, Y.P., Edgerton, V.R., Lee, K.H., Zhao, K.D.: Neuromodulation of lumbosacral spinal networks enables independent stepping after complete paraplegia. Nature Medicine (2018); Wagner, F.B., Mignardot, J.B., Go-Mignardot, C.G.L., Demesmaeker, R., Komi, S., Capogrosso, M., Rowald, A., Senez, I., Caban, M., Pirondini, E., Vat, M., McCracken, L.A., Heimgartner, R., Fodor, I., Watrin, A., Seguin, P., Paoles, E., Keybus, K.V.D., Eberle, G., Schurch, B., Pralong, E., Becce, F., Prior, J., Buse, N., Buschman, R., Neufeld, E., Kuster, N., Carda, S., Zitzewitz, J.v., Delattre, V., Denison, T., Lambert, H., Minassian, K., Bloch, J., Courtine, G.: Targeted neurotechnology restores walking in humans with spinal cord injury. Nature 563(7729), 65 (2018)), требуют обработки в реальном времени топологии из тысяч нейронов и сотен тысяч синапсов на одноплатном компьютере с ограниченным весом и обычно без подключения к сети.
[0082] Сравнение моделей
[0083] Для сравнения производительности были использованы 3 наиболее близких модели спайкового нейрона: LIF-модель, модель Ижикевича и упрощённый цифровой нейрон (УЦН), предложенный ниже. Три этих модели близки с точки зрения производительности, модель Ижикевича и УЦН специально разработаны для экономии времени вычислений.
[0085] Модель Ижикевича является упрощённой моделью Ходжкина-Хаксли и имеет биореалистичные параметры, такие как время и амплитуда спайка (фиг. 11 a1), но в качестве порогового значения используется максимальная амплитуда спайка. Таким образом, ширина спайка может быть огромной (например, 5 мс) в случае низких весов входных синапсов. В дополнение, модель Ижикевича может работать в разных режимах в зависимости от типа нейрона.
[0086] LIF-модель использует входной ток для зарядки емкости, чтобы обновить мембранный потенциал. Эта модель считается более простой, чем модель Ижикевича. Параметры LIF-модели, такие как частота спайка или рефракторный период соответствуют параметрам биологического нейрона (фиг. 11 a2). Для модели УЦН временные параметры являются наиболее важным фактором для обработки в реальном времени по сравнению с амплитудой, которая использовалась в качестве единичных импульсов для сокращения времени расчёта при умножении синаптического веса на соответствующую амплитуду спайка. Поэтому в УЦН-модели используются биореалистичный рефракторный период и продолжительность спайка для обработки нейрона в реальном времени. В модели УЦН форма спайка схожа со спайком в LIF-модели, но траектория мембранного потенциала во время рефракторного периода и состояния покоя не является гладкой (фиг. 11 a3). Ток не используется для расчёта уровня (мембранного потенциала) в модели УЦН. Напротив, ток представляется суммой весов проекций, утечки и шума для увеличения производительности модели.
[0087] УЦН
[0088] Симуляция упрощённой нейронной модели, способной осуществлять обработку в реальном времени топологии из тысяч нейронов, так как время расчёта является критичной проблемой биореалистичных моделей нейрона. Здесь представлена модель упрощённого цифрового нейрона (УЦН), соответствующая следующим требованиям: обработка в реальном времени на одноплатном компьютере с учётом биореалистичных времён спайков, рефракторного периода, ингибирующего воздействия и обработки входящих спайков, основанной на пороговых значениях. Как показано на фиг. 12, сигналы, приходящие к возбуждающим синапсам, увеличивают вероятность генерации нейроном выходного спайка, в то время как входы к ингибирующим синапсам уменьшаются. Входы не могут влиять на уровень спайка (мембранный потенциал) в течение рефракторного периода. В модели УЦН были учтены следующие предположения для оптимизации кода модели нейрона для обработки в реальном времени нескольких тысяч нейронов и сотен тысяч синапсов:
1. Рассматриваются только биологические нейроны спинного мозга (мотонейроны и интернейроны);
2. Амплитуда спайков исключена для эффективности вычислений;
3. Ингибирующее воздействие уменьшает вероятность генерации нейронами выходного спайка; и
4. Для временных параметров выходного нейронного ответа были использованы биореалистичный спайк и продолжительность рефракторного периода.
L= ∑W ± ток утечки+шум
[0089] С целью расчёта в реальном времени было приведено упрощенное уравнение для уровня, напоминающего мембранный потенциал (уравн. 1 выше), где уровень представляет собой сумму весов проекций, утечки и шума. Когда уровень превышает заданный порог, модель производит сигнал, который представлен единичным импульсом. Схематичная диаграмма УЦН представлена на фиг. 12. Входные единичные сигналы (спайки) обрабатываются маршрутизатором, который передаёт их соответствующему нейрону и его синапсу. Все синапсы УЦН хранят свой вес, поскольку каждый спайк представлен как “1”, нет необходимости умножения синаптического веса на вход. Динамика сомы поддерживается через параметр утечки, который представляет собой натриево-калиевые насосы и утечку калия через полупроницаемую мембрану. Было обнаружено, что шум является важным даже в этой упрощённой модели по причине стохастичности всех нейронных каналов даже в простой цепи в спинном мозге. Параметр утечки и шума - это набор, индивидуальный для каждого нейрона. Пороговая функция запускает выходной генератор спайков с заданной длительностью, когда уровень достигает порогового значения. Рефракторный период реализуется как отрицательная обратная связь с интегратором сомы, которая уменьшает уровень до текущего значения для заданного периода индивидуально для каждой клетки. Таблица синапсов хранит нейроны и их синапсы с аксональными и синаптическими задержками для отправления выходного спайка через маршрутизатор.
[0090] Чтобы сократить требуемую оперативную память и уменьшить время расчёта, был использован тип переменных unsigned short (uint16_t) языка C++ (2 байта) для переменной уровня, поскольку операции с плавающей запятой выполняются медленнее, чем целочисленные операции (см., напр., Limare, N.: Integer and Floating-Point Arithmetic Speed vs Precision (2014)). Использование типа unsigned short позволяет балансировать между возможным количеством состояний уровня (в абстрактных беззнаковых единицах от 0 до 65 535) и сохранением в оперативной памяти. Таким образом, можно разместить дополнительные нейроны УЦН со скоростью, которая в два раза больше, чем у LIF и в четыре раза больше, чем у моделей Ижикевича (в 4 и 8 раз соответственно, если используется double). Это может быть важно для реализации одноплатных компьютеров сети.
[0091] Модель УЦН позволяет снизить стоимость вычислений разнообразных параметров отдельного нейрона при сохранении обработки вычислений из тысяч нейронов с сотнями тысяч синапсов в реальном времени.
[0092] Результаты
[0093] Для сравнения трёх моделей был использован отдельный компьютер с параллельной (openMP) реализацией нейронной сети одинакового размера с разными моделями нейрона на процессоре (Intel® Xeon® Processor E5-2650 v2 (8 ядер, 2:60GHz)) с размером оперативной памяти 96 Гбайт. В течение симуляции все модели нейронов имели постоянные параметры, за исключением мембранного потенциала (U_m модели Ижикевича). Данные параметры хранились в массивах. Были протестированы два режима симуляции (покой и спайкование, влияющие на состояние нейронов). В течение режима покоя симуляции входной ток в нейрон не наблюдался. Напротив, в течение режима спайкования, спайковая активность производилась всеми нейронами каждые 7.5 мс (период спайка плюс рефракторный период для гарантии достижения потенциала покоя). Чтобы свести к минимуму побочные эффекты при измерении времени вычислений нейронного режима, не использовались ни синапсы, ни спайки, ни регистраторы потенциала.
[0094] Симуляция включала 10 тестов на нейрон, размер сетки составлял от 1,000 до 20,000 нейронов с размером шага 1,000. Всего 200 симуляций для одной модели.
[0095] Полученные данные показаны на фиг. 11 и представлены как направленная линия (с использованием функции polyfit пакета NumPy). В режиме покоя (фиг. 11b) модели УЦН и LIF рассчитываются быстрее, чем в режиме реального времени (срабатывают биологические нейроны) с 20,000 нейронами. Модель Ижикевича показала время ниже порога реального времени, если число нейронов меньше 13,000. В режиме спайкования (фиг. 11c) УЦН и LIF соответствуют требованиям работы в режиме реального времени, в то время как модель Ижикевича находится выше отметки. Все три протестированные модели имеют линейные временные зависимости с разными наклонами на фиг. 11b и c, что обусловлено дополнительными арифметическими операциями и различным количеством переменных.
[0096] Заключение
[0097] Была представлена упрощённая модель нейрона для вычислений в режиме реального времени, например, для ограниченного аппаратного обеспечения, или носимого устройства. Сравнение производительности моделей Ижикевича и LIF в двух режимах (покое и спайковании) показывает лучшую производительность модели УЦМ.
[0098] Вышеупомянутое детальное описание вариантов реализации использовалось для дальнейшей ясной характеристики свойств настоящего изобретения. Вышеуказанное описание для каждого варианта реализации не ограничивает сферу настоящего изобретения. Следовательно, область применения настоящего изобретения должна быть объяснена наиболее широко в соответствии с формулой изобретения, указанной далее в связи с подробным описанием, и должна охватывать все возможные эквивалентные вариации и эквивалентные устройства.
[0099] Настоящее изобретение может быть системой, способом и/или компьютерным программным продуктом. Компьютерный программный продукт может включать машиночитаемый носитель информации, имеющий машиночитаемые программные инструкции на нём для того, чтобы заставить процессор выполнять аспекты настоящего изобретения.
[0100] Машиночитаемый носитель информации может быть реальным устройством, который может быть сохранять инструкции для использования устройством для выполнения команд. Машиночитаемый носитель информации может быть, например, запоминающим устройством, оптическим запоминающим устройством, электромагнитным запоминающим устройством, полупроводниковым запоминающим устройством или любой подходящей комбинацией вышеизложенного, но не ограничивается данным списком. Неисчерпывающий перечень более конкретных примеров машиночитаемого носителя информации включает в себя следующее: портативную компьютерную дискету, жёсткий диск, оперативно запоминающее устройство (ОЗУ), постоянно запоминающее устройство (ПЗУ), стираемое программируемое постоянно запоминающее устройство (СППЗУ или флеш-память), статическую память с произвольным доступом (СППД), портативную компакт-дисковую постоянно запоминающее устройство (КД-ПЗУ), цифровой универсальный диск (DVD), карту памяти, дискету, механически закодированное устройство, такое как перфокарты или виниловые диски с записанными на них инструкциями, и любая подходящая комбинация вышеизложенного. Машиночитаемый носитель информации, используемый в настоящем документе, не должен толковаться как транзиторные сигналы как таковые, такие как радиоволны или другие свободно распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся через волновод или другие средства передачи (например, световые импульсы, проходящие через волоконно-оптический кабель), или электрические сигналы, передаваемые по проводу.
[0101] Машиночитаемые программные инструкции, описанные в настоящем документе, могут быть загружены на соответствующие вычислительные/обрабатывающие устройства с машиночитаемого носителя информации или на внешний компьютер или внешнее запоминающее устройство через сеть, например, Интернет, локальную сеть, глобальную сеть и/или беспроводную сеть. Сеть может включать медные кабели передачи, оптические волокна передачи, беспроводную передачу, маршрутизаторы, файерволы, коммутаторы, сетевые шлюзы и/или граничные серверы. Карта сетевого адаптера или сетевой интерфейс в каждом вычислительном/обрабатывающем устройстве получает машиночитаемые программные инструкции из сети и пересылает машиночитаемые программные инструкции для хранения на машиночитаемом носителе информации в соответствующем вычислительном/обрабатывающем устройстве.
[0102] Машиночитаемые программные инструкции для выполнения операций настоящего изобретения могут быть инструкциями ассемблера, инструкциями архитектуры набора команд (ISA), машинными инструкциями, машинно-зависимыми инструкциями, микрокодом, инструкциями микропрограммного обеспечения, данными настройки состояния или исходным кодом, либо объектным кодом, написанным на любой комбинации одного или более языков программирования, включая объектно-ориентированные языки программирования, такие как Smalltalk, C++ или тому подобные, и обычные процедурные языки программирования, такие как C или аналогичные языки программирования. Машиночитаемые программные инструкции могут выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный программный пакет, частично на компьютере пользователя и частично на удалённом компьютере или полностью на удалённом компьютере или сервере. В последнем случае удалённый компьютер может быть подключен к компьютеру пользователя через любой тип сети, включая локальную сеть (LAN) или глобальную сеть (WAN), или соединение может быть выполнено с внешним компьютером (например, через Интернет с использованием интернет-провайдера). В некоторых вариантах реализации электронные схемы, включающие, например, программируемые логические схемы, полевые программируемые логические схемы (ПЛС), программируемые вентильные матрицы (ПВМ) или программируемые логические матрицы (ПЛМ), могут выполнять машиночитаемые программные инструкции путём использования информации о состоянии машиночитаемых программных инструкций для индивидуальной настройки электронных схем, чтобы выполнять аспекты настоящего изобретения.
[0103] Аспекты настоящего изобретения описаны здесь со ссылкой на иллюстрации блок-схем и/или схематичные диаграммы методов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами реализации настоящего изобретения. Следует понимать, что каждый блок иллюстраций блок-схемы и/или блок диаграмм, а также комбинации блоков в иллюстрациях блок-схемы и/или блоках диаграмм могут быть реализованы с помощью машиночитаемых программных инструкций.
[0104] Данные машиночитаемые программные инструкции могут быть предоставлены процессору компьютера общего назначения, компьютера специального назначения или другого программируемого устройства обработки данных для производства машины, так что инструкции, которые выполняются через процессор компьютера или другого программируемого устройства обработки данных, создают средства для реализации функций/действий, указанных в блок-схеме и/или схематичной диаграмме блока или блоках. Эти машиночитаемые программные инструкции могут также храниться на машиночитаемом носителе информации, который может направлять компьютер, программируемое устройство обработки данных и/или другие устройства на функционирование определённым образом, так что машиночитаемый носитель информации, содержащий хранящиеся на нем инструкции, включает предмет производства, содержащий инструкции, которые реализуют аспекты функции/действия, указанные в блок-схеме и/или схематичной диаграмме блока или блоков. [0105] Машиночитаемые программные инструкции также могут быть загружены на компьютер, другое программируемое устройство обработки данных или другое устройство, чтобы вызвать выполнение ряда операционных шагов на компьютере, другом программируемом устройстве или другом устройстве для получения компьютерно-реализованного процесса, так что инструкции, которые выполняются на компьютере, другом программируемом устройстве или другом устройстве, реализуют функции/действия, указанные в блок-схеме и/или схематичной диаграмме блока или блоков.
[0106] Блок-схема и диаграммы блоков на чертежах иллюстрируют архитектуру, функциональность и функционирование возможных реализаций систем, методов и компьютерных программных продуктов в соответствии с различными вариантами реализации настоящего изобретения. В связи с этим каждый блок в блок-схеме или диаграммах блока может представлять собой модуль, сегмент или часть инструкций, которая содержит одну или несколько исполняемых инструкций для реализации указанной логической функции (функций). В некоторых альтернативных реализациях функции, указанные в блоке, могут происходить не в том порядке, который указан на чертежах. Например, два блока, показанные последовательно, могут выполняться фактически одновременно, или блоки могут иногда выполняться в обратном порядке в зависимости от задействованной функциональности. Также следует отметить, что каждая часть блока диаграмм и/или иллюстраций блок-схем и комбинации частей в блок-схемах и/или иллюстрациях блок-схем могут быть реализованы аппаратно-ориентированными системами специального назначения, выполняющими заданные функции или действия или выполняющими комбинации аппаратных средств специального назначения и компьютерных инструкций.
[0107] Терминология, используемая в настоящем документе, предназначена только для описания конкретных вариантов реализации и не предназначена для ограничения настоящего изобретения. Используемые здесь формы единственного числа “a”, “an” и “the” предназначены также для включения форм множественного числа, если контекст явно не указывает иное. Также следует понимать, что термины “включает” и/или “включающий”, когда они используются в настоящей спецификации, определяют наличие указанных признаков, целых чисел, шагов, операций, элементов и/или компонентов, но не исключают наличия или добавления одного или нескольких других признаков, целых чисел, шагов, операций, компонентов элементов и/или их групп.
[0108] Соответствующие структуры, материалы, действия и эквиваленты всех способов или функциональных элементов в формуле изобретения ниже предназначены для включения любой структуры, материала или действия для выполнения функции в сочетании с другими заявленными элементами, как специально заявлено. Описание настоящего изобретения было представлено в целях иллюстрации и описания, но не является исчерпывающим или ограничивающим изобретение в описанной форме. Многие модификации и вариации будут очевидны для тех, кто обладает обычными навыками в данной области, не отходя от сферы изобретения. Вариант реализации был выбран и описан для того, чтобы наилучшим образом объяснить принципы изобретения и практического применения, а также дать возможность другим специалистам в данной области понять изобретение для различных вариантов осуществления с различными модификациями, которые подходят для конкретного предполагаемого использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ нейромодуляции для лечения последствий травмы спинного мозга | 2023 |
|
RU2831229C2 |
| Способ лечения травматического повреждения спинного мозга | 2021 |
|
RU2758760C1 |
| Способ стимуляции головного мозга | 2023 |
|
RU2822811C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИСТАНЦИОННОГО ВЫБОРА ОДЕЖДЫ | 2020 |
|
RU2805003C2 |
| Способ терапии метастатического рака с использованием вируса Сендай | 2017 |
|
RU2662916C1 |
| Способ обеспечения устойчивого функционирования сложной технической системы | 2022 |
|
RU2815224C1 |
| СПОСОБ СТИМУЛЯЦИИ МЕТАБОЛИЧЕСКИХ ПРОЦЕССОВ В БИОЛОГИЧЕСКИХ ТКАНЯХ В ЭКСПЕРИМЕНТЕ | 2012 |
|
RU2513242C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВИРТУАЛЬНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПОДГОТОВКИ ОБУЧАЮЩИХСЯ В ОБЛАСТИ ОБЕСПЕЧЕНИЯ ПОЖАРНОЙ БЕЗОПАСНОСТИ И ЗАЩИТЫ НАСЕЛЕНИЯ И ТЕРРИТОРИЙ ОТ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2023 |
|
RU2816401C1 |
| Средство, снижающее относительное содержание низкодифференцированных и повышающее относительное содержание высокодифференцированных клеток в инвазивной карциноме молочной железы неспецифического типа | 2019 |
|
RU2743710C1 |
| ФАРМАКОЛОГИЧЕСКАЯ КОМБИНАЦИЯ ПОЛИКАТИОННОГО НОСИТЕЛЯ ПЭГ-ПЭИ-ТАТ С ЗАКЛЮЧЕННОЙ В НЕМ ПЛАЗМИДОЙ, НЕСУЩЕЙ ТЕРАПЕВТИЧЕСКИЕ ГЕНЫ HSVtk И GM-CSF ДЛЯ ЦЕЛЕЙ ГЕНОТЕРАПИИ ОПУХОЛЕВЫХ ЗАБОЛЕВАНИЙ | 2013 |
|
RU2575077C2 |




Группа изобретений относится к медицине, а именно к нейроморфной системе протезирования для облегчения сенсомоторной функции у лиц, нуждающихся в этом. Система включает множество стимуляторов, имеющих один или более каналов, которые сконфигурированы таким образом, чтобы их можно было разместить на различных частях тела пациента для электрической стимуляции: групп мышц, периферических нервов, нервных сплетений и/или спинного мозга. Система также включает множество датчиков, настроенных для обнаружения и передачи данных непрерывного или циклического распределения веса тела, угловых движений суставов и/или электрофизиологических параметров, и множество контроллеров, сконфигурированных для того, чтобы принимать объединенные данные из множества датчиков. Контроллеры также настроены для обработки объединенных данных и передачи их на устройство, реализующее искусственный нейронный контур на основании фМВП. Устройство искусственного нейронального контура сконфигурировано для реализации и воссоздания топологии центрального генератора упорядоченной активности. Устройство искусственного нейронального контура сконфигурировано для применения биореалистичной нейронной топологии для генерации паттерна двигательной функции и координирует применение электрических сигналов через множество стимуляторов к субъекту, нуждающемуся в этом, и таким образом реализует паттерн моторной функции. Достигается возможность восстановления сенсомоторной функции у пациентов. 3 н. и 18 з.п. ф-лы, 12 ил.
1. Способ воссоздания нейронной топологии, отвечающей за активацию двигательных функций в конечностях, содержащий:
обнаружение моторных вызванных ответов в корреляции с входными стимуляционными параметрами и сенсорной модуляцией;
анализ паттерна функциональных моторных вызванных ответов для паттерна нейронного ответа, определяемого на основе множества пиков, каждый из которых имеет максимальное и минимальное значения, амплитуду и время; и
воссоздание топологии нейронного контура путем сравнения паттерна нейронного ответа с известной гипотетической нейронной топологией, которая формирует выходной сигнал для активации моторной функции в конечностях.
2. Способ воссоздания нейронной топологии по п.1, отличающийся тем, что дополнительно содержит моделирование паттерна нейронного ответа с использованием симулятора нейрональной активности.
3. Способ воссоздания нейронной топологии по п.2, в котором симулятором нейрональной активности выступает симулятор GRAS.
4. Способ воссоздания нейронной топологии по п.3, в котором симулятор GRAS использует модель упрощенного цифрового нейрона (УЦН).
5. Способ воссоздания нейронной топологии по п.1, в котором паттерн нейронного ответа определяется на основе амплитуды, частоты и скважности отдельной нейронной цепи.
6. Способ воссоздания нейронной топологии по п.1, в котором осцилляторный мотив (ОМ) используется для генерации паттерна нейронного ответа, где ОМ включает компонент взаимного возбуждения и компонент ингибирующей обратной связи.
7. Способ воссоздания нейронной топологии по п.1, в котором модель многоуровневой спинномозговой локомоторной сети (мСЛС) используется для генерации паттерна нейронного ответа, при этом мСЛС содержит моносинаптический уровень и полисинаптический уровень.
8. Система нейроморфного протеза для облегчения сенсомоторной функции у субъектов, нуждающихся в этом, которая содержит:
стимуляторы, имеющие по крайней мере один канал, сконфигурированный для обеспечения электрической стимуляции групп мышц, периферических нервов, нервных сплетений и/или спинного мозга;
датчики, настроенные для обнаружения и передачи данных непрерывного или циклического распределения веса, угловых движений суставов и/или электрофизиологических параметров;
контроллеры, сконфигурированные для получения объединенных данных от датчиков и настроенных для обработки объединённых данных и их передачи в устройство, реализующее схему искусственного нейронного контура, для воспроизведения фМВП, сконфигурированное для реализации воссоздания топологии центрального генератора упорядоченной активности (ЦГУА),
в котором устройство искусственного нейронного контура, использует био-реалистичную нейронную топологию для генерации паттерна моторной функции и координирует применение электрических сигналов через стимуляторы, совместимые с биологической нейронной стимуляцией, к субъекту, нуждающемуся в этом, для реализации паттерна моторной функции.
9. Система нейроморфного протеза по п.8, отличающаяся тем, что устройство, реализующее искусственный нейронный контур, основанное на фМВП, содержит синхронизированный набор одноплатных цифровых компьютеров.
10. Система нейроморфного протеза по п.8, отличающаяся тем, что устройство, реализующее искусственный нейронный контур, основанное на фМВП, содержит спайковые аналоговые схемы, реализующие центральный генератор упорядоченной активности сегмента спинного мозга, реализованный как интегральная схема.
11. Система нейроморфного протеза по п.9, отличающаяся тем, что дополнительно содержит:
последовательный порт универсального асинхронного приемника-передатчика (УАПП); и
цифроаналоговый преобразователь (ЦАП), где ЦАП сконфигурирован для преобразования сигналов по напряжению, полученных стимуляторами, в сигналы тока.
12. Система нейроморфного протеза по п.10, отличающаяся тем, что включает:
цифроаналоговый преобразователь (ЦАП), где ЦАП сконфигурирован для преобразования сигналов напряжения, полученных стимуляторами, в сигналы тока.
13. Система нейроморфного протеза по п.8, отличающаяся тем, что датчики содержат датчик давления, расположенный вокруг зоны стельки, и датчик изгиба, расположенный вокруг голеностопа субъекта.
14. Система нейроморфного протеза по п.8, отличающаяся тем, что датчики содержат стимулятор спины, стимулятор левого голеностопа, стимулятор правого голеностопа, стимулятор правого бедра и стимулятор левого бедра.
15. Способ для активации моторной функции в конечностях у субъектов, нуждающихся в этом, характеризующийся тем, что осуществляется с помощью системы нейроморфного протеза, содержащей:
стимуляторы, имеющие по крайней мере один канал, сконфигурированный для обеспечения электрической стимуляции групп мышц, периферических нервов, нервных сплетений и/или спинного мозга;
датчики, настроенные для обнаружения и передачи данных непрерывного или циклического распределения веса тела, угловых движений суставов и/или электрофизиологических параметров;
контроллеры, сконфигурированные для получения объединённых данных от датчиков и настроенные для обработки объединённых данных и их передачи на устройство, устройство, реализующее искусственный нейронный контур, основанное на фМВП, сконфигурированное для реализации воссоздания топологии центрального генератора упорядоченной активности (ЦГУА);
при этом осуществляют стимуляцию субъекта, нуждающегося в этом, для выполнения двигательной функции с помощью электрических сигналов, применяют стимуляторы к субъекту, в котором устройство, реализующее искусственный нейронный контур, основанное на фМВП, реализует био-реалистичную нейронную топологию для генерации паттерна моторной функции и координирует применение электрических сигналов.
16. Способ для активации моторной функции в конечностях по п.15, отличающийся тем, что био-реалистичная нейронная топология определяется способом, содержащим:
обнаружение паттерна нейронного ответа в корреляции с входными параметрами стимуляции;
анализ паттерна нейронного ответа, при этом паттерн нейронного ответа определяется на основе множества пиков, каждый пик имеет максимальное и минимальное значения, амплитуду и время; и
воссоздание топологии нейронного контура путем сравнения сгенерированного паттерна нейронного ответа с паттерном известной нейронной топологии, которая формирует выходной сигнал для активации моторной функции в конечностях.
17. Способ для активации моторной функции в конечностях по п.16, отличающийся тем, что дополнительно содержит моделирование паттерна нейронного ответа с использованием симулятора нейрональной активности.
18. Способ для активации моторной функции в конечностях по п.17, отличающийся тем, что симулятором нейрональной активности выступает симулятор GRAS.
19. Способ для активации моторной функции в конечностях по п.18, отличающийся тем, что симулятор GRAS использует ESRN (Even Simpler Real-Time Model of Neuron) модель нейрона.
20. Способ для активации моторной функции в конечностях по п.16, отличающийся тем, что паттерн нейронного ответа определяют на основе амплитуды, частоты и скважности отдельного нейронного контура.
21. Способ для активации моторной функции в конечностях по п.16, отличающийся тем, что модель многоуровневой спинномозговой локомоторной сети (мСЛС) используется для определения паттерна нейронного ответа, мСЛС содержит моносинаптический уровень и полисинаптический уровень.
| US 2015231396 A1, 20.08.2015 | |||
| Способ реабилитации функциональных нарушений опорно-двигательного аппарата при гемипарезе | 2019 |
|
RU2734406C1 |
| WO 2019147679 A1, 01.08.2019 | |||
| WO 2012094346 A2, 12.07.2012 | |||
| Ортез для лечения пареза стопы | 2016 |
|
RU2681707C2 |

