Изобретение относится к вычислительной технике, в частности к моделирующим устройствам транспортных средств, и может быть использовано для исследований и приемосдаточных испытаний систем автоматического регулирования скорости автомобиля.
Цель изобретения - повышение точности моделирования.
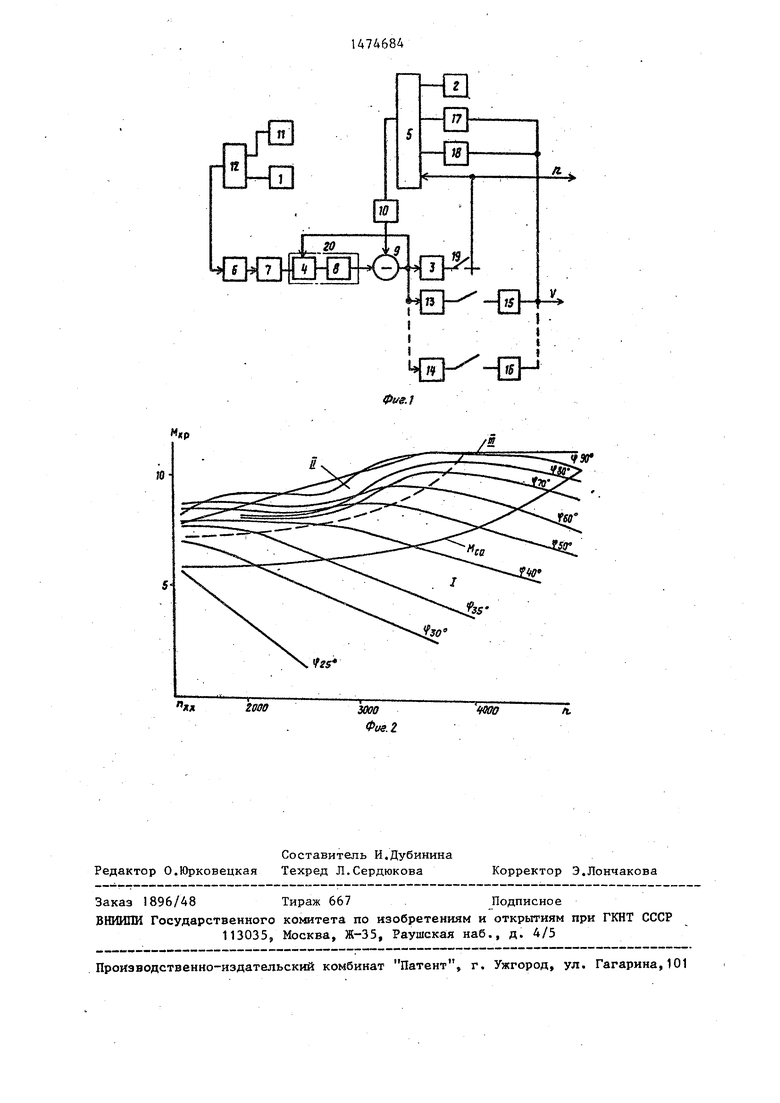
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - экспериментальные статические характеристики бензинового двигателя и момента сопротивления движению автомобиля, приведенного к двигателю.
Устройство для моделирования скоростных характеристик автомобиля и двигателя (фиг. I) содержит блок 1 задания положения дроссельной заслонки двигателя (например, потенциометр) ,,блок 2 задания внешнего момента сопротивления (например, потенциометр), первое апериодическое звено 3, управляемый ограничитель 4,
первый сумматор 5, второе апериодическое звено 6, блок 7 временного запаздывания, ограничитель 8, блок 9 сравнения и второй блок 10 масштабирования. В состав устройства также входят блок 11 задания оборотов холостого хода (например, потенциометр) и второй сумматор 12, группа апериодических звеньев 13 и 14 (например, по числу передач коробки передач автомобиля), группа блоков 15 и 16 масштабирования (по числу апериодических звеньев и группе), квадратор -17, первый блок 18 масштабирования и группа переключателей 19. Ограничители 4 и 6 объединены в блок 20 ограничения .
Выходы блоков масштабирования объединены и являются выходом устройства, с которого снимается информация о скорости автомобиля. Переключатели 19 осуществляют коммутацию выходов апериодических звеньев 13 и 14 с входами блоков 15 и 16 масштаСО
Јъ
1
4 СЭ 00 4ь
бирования, или переключатель соединяет выход апериодического звена 3 с входом сумматора 5. С выхода звена 3 снимается информация о частоте вращения коленчатого вала двигателя.
На фиг. 2 обозначены: Мкр- крутящий момент двигателя, (кГм); п - частота вращения коленчатого двигателя (об/мин); tfge. .. . 4jSa положения дроссельной заслонки (90° соответствуют полностью открытой дроссельной заслонке); nvx - частота вращения, соответствующая холостому ходу двигателя; МСО(- момент сопротивления движению автомобили на прямой передаче по горизонтальной дороге, приведенный к валу двигателя.
В основу работы устройства положены уравнения, которые могут быть записаны в виде
V(t)-lnXx+ W(p)if(t)r(U,n)-Kto(K,,V(t) +
+Knv4t)/t))3. ;
1+W(p)W(p)
W(p)
ч
Јie l+T,p
Г В при U 7/ имакс; F(U,n) K4ri при U vxK4U+U0;
1 в остальных случаях;
W(p)
1+Т.р
К,0 при включенной нейтраль- ной передаче;
K,,V(t)+KnV l(t) при включенной 1-й передаче,
где ,1,2,3,4 - соответственно
нейтральная, 1-я, 2-я, 3-я и 4-я передачи.
Устройство работает следующим образом. р
Передаточная функция W апериодического звена 3 определяется выражением
кз
где Kj - коэффициент передачи;
Тэ - постоянная времени апериодического звена 3; р - оператор дифференцирования. Она характеризует инерционные свойства двигателя на холостом ходу. Передаточная функция W 1}апериодического звена 13 определяется выражением
W3
Q 5
0
5
0
5
и - Kl}
w.3- т+т
где Т ,з - постоянная времени апериодического звена 13; К1Э - его коэффициент передачи.
Ее величина определяется собственным моментом инерции двигателя и приведенным к двигателю (например, в зависимости от выбранной передачи коробки передач) моментом инерции трансмиссии и поступательно движущихся масс автомобиля. Передаточная функция апериодического звена 14 определяется аналогичным выражением и отличается только величиной постоянной времени.
Передаточная функция W апериодического звена 6 определяется выражением
w - -&-- KTtp
где К6 - коэффициент передачи;
Т - постоянная времени апериодического эвена 6, характеризующая динамические свойства впускного тракта.двигателя .
Коэффициент передачи блока 10 масштабирования равен К1в, а блока 18 масштабирования - К1в. Коэффициенты передачи блоков 15 и 16 масштабирования соответственно равны К,5и- Kffc. Их значения определяются соотношениями между скоростью автомобиля и частотой вращения коленчатого вала двигателя в зависимости от выбранной передачи. Передаточная функ- ция Ул квадратора 17 определяется выражением .V , где К 11- коэффициент передачи, V - скорость автомобиля .
Когда один из переключателей 19 находится в положении, при котором он осуществляет соединение, выхода апериодического звена 3 с входом сумматора 5 (что соответствует нейтральному положению коробки передач), на выходе апериодического звена 3 формируется сигнал, соответствующий частоте п вращения коленчатого вала двигателя. В статическом режиме (сигналы на выходах всех блоков постоянны) частота вращения при значениях сигналов на выходе блока 1 задания положения дроссельной заслонки М1 и на выходе блока 2 задания внеш
5
него момента сопротивления Мс(в ста тическом режиме ), лежащих в зоне I (фиг. 2) характеристик двигателя, определяется зависимостью ,,x+K4cf-KfeMc-KMn. Частота вращени коленчатого вала двигателя, соответвующая холостому ходу в предлагаемо устройстве, задается с помощью блок 11 задания оборотов холостого хода. Как видно из фиг. 2, характеристики карбюраторного двигателя в зоне II являются существенно нелинейными. В устройстве они аппроксимируются ломаной линией, задаваемой управляемы ограничителем 4 и ограничителем 8. Динамические характеристики устройства в этом случае определяются апериодическими звеньями 3 и 6 и блоком 7 временного запаздывания. При этом второе апериодическое звено 6 и бло -7 временного запаздывания характеризуют динамические свойства впускного тракта двигателя, а апериодическое звено 3 - момент инерции двигателя.
Включению передачи в устройстве соответствует положение одного из переключателей 19, при котором он осуществляет соединение выхода одного из апериодических звеньев группы например звена 13, с входом соответствующего блока 15 масштабирования и с входом сумматора 5. Работа уст ройства в данном случае аналогична описанной. Дополнительной особенностью является то, что момент сопротивления движению автомобиля, приведенный к двигателю, зависит от скоростного режима движения автомобиля. Момент сопротивления движению автомобиля М сосвязан со скоростью движения V зависимостью +КпУг. В предложенном устройстве эта зависимость реализуется с помощью блока 2 задания внешнего момента сопротивления (который задает момент сопротивления, определяемый коэффициентом сцепления шин с дорогой, уклоном продольного профиля дороги и др.), квадратора 17 и блока 18 масштабирования.
5
4684
5 5 0
0 5 0 5 0
« 6
Формула изобретения Устройство для моделирования скоростных характеристик автомобиля и двигателя, содержащее блок задания положения дроссельной заслонки двигателя, блок задания внешнего мо,мен- та сопротивления, первое апериодическое звено, блок ограничения, блок сравнения, два сумматора и блок задания оборотов холостого хода, причем выход блока задания внешнего Момента сопротивления соединен с первым входом первого сумматора, выход блока задания положения дроссельной заслонки двигателя подключен к первому входу второго сумматора, отличающееся тем, что, с целью повышения точности моделирования, в него введены блок временного запаздывания, второе апериодическое звено, квадратор, первый и второй блоки масштабирования, группа апериодических звеньев, группа переключателей и группа блоков масштабирования, выходы которых подключены к входам первого блока масштабирования и квадратора, выходы которых подключены соответственно к второму и третьему входам первого сумматора, выход которого через второй блок масштабирования подключен к первому входу блока сравнения, выход которого соединен с входом первого апериодического звена, с входами апериодических звеньев группы и с управляемым входом блока ограничения, выход которого подключен к второму входу блока сравнения, выходы апериодических звеньев группы и первого апериодического звена через соответствующие переключатели группы соединены соответственно с входами блоков масштабирования группы и четвертым входом первого сумматора, выхрд блока задания оборотов холостого хода подключен к второму входу второго сумматора, выход которого через последовательно соединенные второе апериодическое звено и блок временного запаздывания соединен с информационным входом блока ограничения.
1S
| название | год | авторы | номер документа |
|---|---|---|---|
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Способ регулирования подачи топлива в двигатель внутреннего сгорания с байпасным воздушным каналом холостого хода | 1989 |
|
SU1731972A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| Устройство для регулирования производительности компрессора | 1987 |
|
SU1562534A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2057931C1 |
| ИЗМЕРИТЕЛЬ ПОТЕРЬ МОЩНОСТИ (ВАРИАНТЫ) | 2011 |
|
RU2467337C2 |
| СЧЕТЧИК ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ С ИНДИКАЦИЕЙ ПОТЕРЬ МОЩНОСТИ (ВАРИАНТЫ) | 2010 |
|
RU2449356C1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для автоматической коррекции массы кокса | 1986 |
|
SU1381165A1 |
| Устройство для управления приводом робота | 1983 |
|
SU1352450A1 |
Изобретение относится к вычислительной технике, в частности к моделирующим устройствам транспортных средств. Цель изобретения - повышение точности моделирования. Для этого в устройство введены блок временного запаздывания, апериодическое звено, квадратор, блоки масштабирования, группа апериодических звеньев и группа переключателей. Устройство позволяет повысить достоверность исследования систем автоматического регулирования скорости автомобиля. 2 ил.
Ч«Р
10
fzs
пяя
zooo
зооо Фае. I
WOO
| Устройство для моделирования двигателя внутреннего сгорания | 1983 |
|
SU1120371A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования прямолинейного движения автомобиля в тренажере | 1973 |
|
SU486333A1 |
| кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
