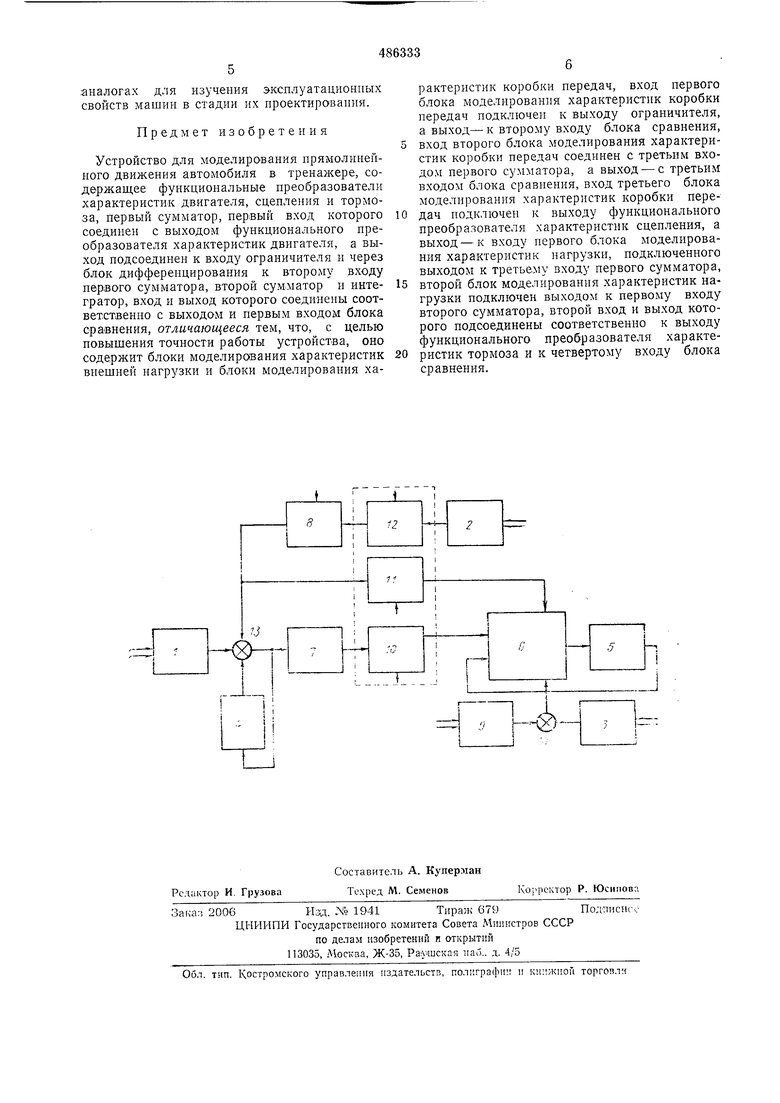
На чертеже представлена схема устройства для моделирования прямолинейного движения автомобнля в тренажере.
Основными элементами устройства являются: функциональные преобразователи характеристик двигателя 1, сцепления 2 и тормоза 3. блок 4 дифференцнровалня, интегратор 5, блок 6 сравнения, ограничитель 7, блоки 8 и 9 моделнровання характеристик внешней нагрузки, блоки 10, И и 12 моделирования характеристик коробки нередач, сумматоры 13 и 14.
Первый вход сумматора 13 сосдннен с выходом функционального преобразователя 1 характернстнк двигателя, а его выход - с входом ограничителя 7 н через блок 4 днфференцироваиия с вторым входам этого сумматора. Вход и выход интегратора 5 связаны соответствеиио с выходом и нервым входом блока 6 сравнения. Вход блока 10 моделирования ха)актернстик коробки нередач нодключен к выходу ограничителя 7, а выход - к второму входу блока сравнения. Вход блока 11 моделнровапня характеристик коробки передач соедннеи с третьим входом сумматора 13, а выход - с третьим входом блока сравнення. Вход третьего блока 12 моделирования характеристик коробки передач подключеа к вы.ходу функционального нреобразователя 2 характернстнк сцеплення, а выход - к входу блока 8 моделирования характеристик иагрузки, нодключенного выходом к третьему входу сумматора 13. Блок 9 моделнровання характеристик нагрузки нодсоедннен выходом к первому входу сумматора 14, а второй вход и выход этого сумматора - соответственно к выходу функционального преобразователя 3 характернстнк то)моза н к четвертому входу блока 6 сравнения. На входы функциональных нреобразователе 1, 2, 3 подаются сигналы управления соответственно: степень дросселафовання бд, степень включения сцеплення бс н степень торможенпя бт на входы блоков 8 н 9 моделирования характернстнк внешней нагрузки - сигналы, пропорцио нальные величине внешнего сопротиатения движению автомобиля Р„..
Работа устройства заключается в следующем.
Снгнал па входе блока 4 дифференцирования t/1,,1, иронорциональный угловой скорости вала двигателя coi, зависит от величины сигнала на выходе функционального прео-бразователя 1 характеристик двигателя Ut(6.i), пропорциональной функции /(бд), от величины сигнала на выходе блока 8 моделироваиия нагрузки f/jif, нропорцноа1альиой моменту внешней нагрузки нли моменту сцепления vMc, и от величины сигнала на выходе блока дифференцн
рования f/o)i, иропо-рциональной нзменению уг
ЛОВОЙ скорости СО.
Ограничитель 7 служит для того, чтобы сигнал Си1 не изменял своего знака, что воспроизводит реальный факт работы двнгателя в соответствии с условием .
Сигнал /.м, измененный блоком 11 модели рования характеристнк коробки передач на величнну, пронорциональную передаточному числу коробкн передач, суммируется с сигналом УШ, нронорциональным величине силы сопротивлення дви кению автомобиля Рц-, и подводится через блок 6 сравиения к входу интегратора 5. В результате сигнал на входе интегратора f/f получается нронорциональным велиdVчиие ускорения автомооиля-г--, а на выходе
и к - нронорциональным величине скорости V.
Выходной сигнал интегратора одностороннего действия не изменяет своего знака. Такая характернстика интегратора может быть иолучена различными путями, например, с помош,ью нелинейной отрнцательной обратной связи через диод. Это нео:бходимо для того, чтобы нри моделировании замедленного движения автомобиля сохранилось условие 1А.О.
Блок 6 сравнения обеснечивает формирование сигнала Uv на выходе интегратора 5 в соответствии с условием , где k - коэффициент, обратно нронорциональный передаточному числу коробки передач. Если kU(i)., что характерно, например, для случаев буксования сцепления или движеиия автомобиля накатом, то интегрирование нодводимого к интегратору сигнала проводится в завнсимости от соотпоп1ення сигналов L.M и {/,„ н инерционных свойств автомобиля. Так, если , то величина сигнала U ия выходе ннтегратора растет. Если U,U,r, то величина UK уменьп1ается.
Когда kU(f,i Uv, что характерно для установившегося режима движения автомобиля
( - О ) ,то на выходе интегратора иолучается сигнал Lt -const. Если /et/uJi f/t,, что характерно, нанример, для случаев резкого снижения оборотов двигателя или его полной остановки, то блок с)авнения обеснечивает интегрирование иод действием сигнала . Нри этом сигнал Lt- уменьшается в зависимости от ииерционных свойств автомобиля и тем интенсивнее, чем больше абсолютная величииа сиги а,ч а t-,,.,
Сигналы бйзь Lv, f/u, нодводимые к имитаторам физичес1 их факторов движения тренажера, изменяются подобно нзменению угловой скорости вала двнгателя со, скорости V и ускоdVрения -.- реального автомоонля, что сносооствует восироизведеиию дииа.мических характеристик этих имитаторов, нодобиых реальным хара1 теристика.м факторов движения и создания у обучаемого иллюзий, нодобиых 1еальным ощущениям.
Нред.гагаемое устройство может быть использовано в тренажерах для нодготовки и изучения деятельности водителей колесных и 05 гусеничных машин, а также в динамических
аналогах для изучения эксплуатационных свойств машин в стадии их ироектирования.
Предмет изобретения
Устройство для моделирования прямолинейного движения автомобиля в тренажере, содержащее функциональные преобразователи характеристик двигателя, сценления и тормоза, первый сумматор, пер|ВЫЙ вход которого соединен с выходом функционального преобразователя характеристик двигателя, а выход подсоединен к входу ограничителя и через блок дифференцирования к второму входу nepiBoro сумматора, второй сум матор и интегратор, вход и выход которого соединены соответственно с выходом и первым входом блока сравнения, отличающееся тем, что, с целью повышения точности работы устройства, оно содержит блоки моделирования характеристик внешней нагрузки и блоки моделирования характеристик коробки передач, вход первого блока моделирования характеристик коробки передач подключен к выходу ограничителя, а выход-к второму входу блока сравнения, вход второго блока моделирования характеристик коробки передач соединен с третьим входом первого сумматора, а выход - с третьим входом блока сравнения, вход третьего блока моделнрования характеристик коробки передач подключен к выходу функционального преобразователя характеристик сцепления, а выход-к входу первого блока моделирования характеристик нагрузки, подключенного выходом к третьему входу первого сумматора, второй блок моделирования характеристик нагрузки подключен выходом к первому входу второго сумматора, второй вход и выход которого подсоединены соответственно к выходу функционального преобразователя характеристик тормоза и к четвертому входу блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования прямолинейного движения автомобиля в тренажере | 1974 |
|
SU520602A2 |
| Кинотренажер водителя гусеничной машины | 1987 |
|
SU1531707A1 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Тренажер гусеничной машины | 2023 |
|
RU2820559C1 |
| Тренажер водителя транспортныхСРЕдСТВ | 1979 |
|
SU830507A1 |
| Устройство для моделирования механической передачи | 1982 |
|
SU1091192A2 |
| Устройство для моделирования динамикидВижЕНия гуСЕНичНОй МАшиНы | 1979 |
|
SU851426A1 |
| Устройство для моделирования механической передачи | 1985 |
|
SU1254515A1 |
| Устройство для моделирования турбоагрегата | 1976 |
|
SU572812A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU909674A2 |
.Г-4Т
