1
Изобретение относится к измерительным устройствам и может быть использовано для определения угла рефракции при визировании на объекты в устройствах оптической связи, приема и передачи информации, устройствах лазерной локации, пассивных оптических системах и т. п.
Цель изобретения - повышение точности и сокращение времени измерения за счет проведения измерений в высокочастотной области флуктуации угла прихода светового пучка.
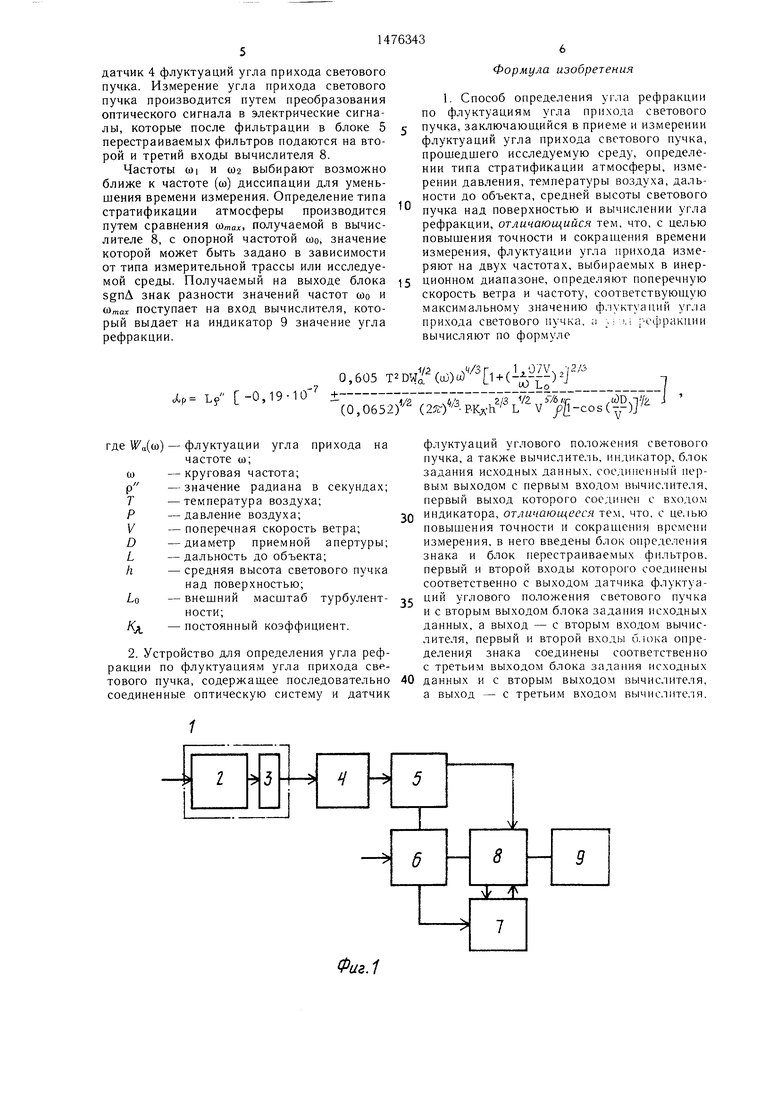
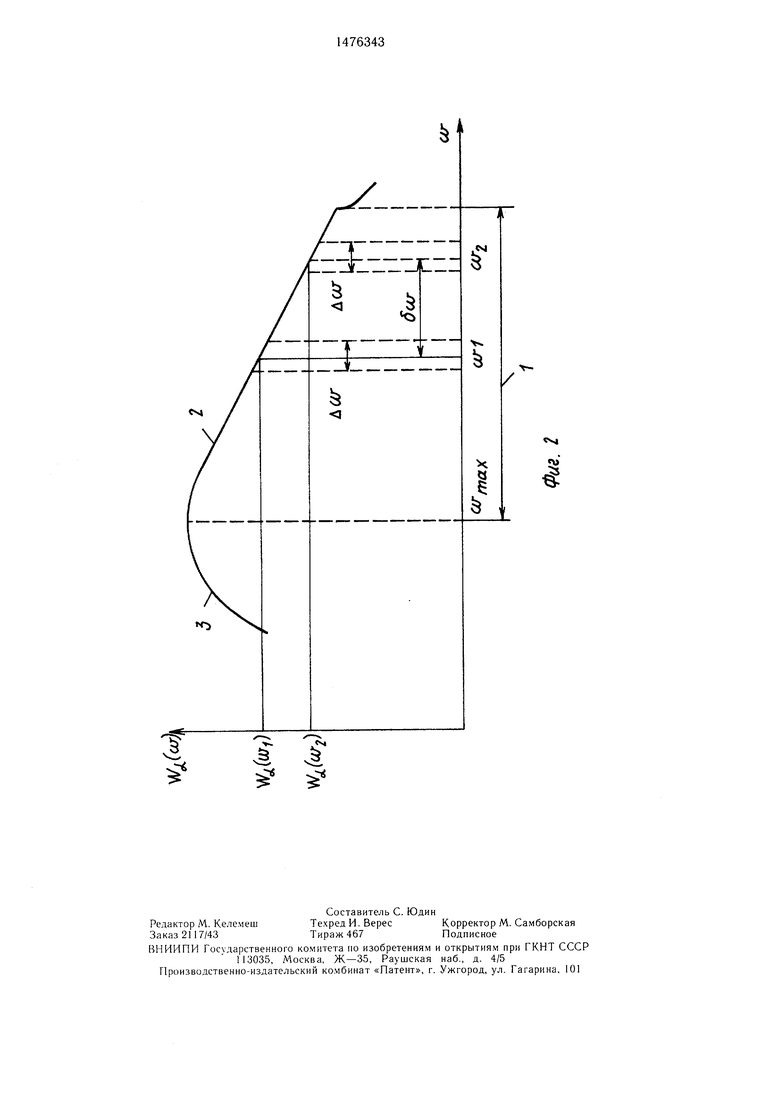
На фиг. 1 приведена блок-схема устройства, реализующего предложенный способ; на фиг. 2 - зависимость флуктуации угла прихода от частоты.
Электромагнитное излучение, например, от источника оптического излучения или отраженное от объекта наблюдения принимают с помощью оптической системы.
После приема излучения преобразуют флуктуации угла прихода излучения в электрический сигнал известными методами, например с помощью фотоэлектрических датчиков, и фильтруют электрический сигнал на частотах coi и io (фиг. 2), выбираемых в области инерционного интервала частот от о)„ш, до сопки - (1, фиг. 2), где .n - частота, соответствующая диссипации энергии И аПжчшЖб.З 10
Выбор частот ом и ш: в области инерционного диапазона позволяет сократить время
о о
4О
измерения, а также учесть изменение частотного спектра, которое зависит от времени. После фильтрации на двух частотах coi и измеряют амплитудные значения флуктуации Wa(a) и Wa() (фиг. 2) в полосе частот Дсо. Такая операция позволяет по известному закону Wa (со) распределения флуктуации угла прихода светового пучка и по измеренным значениям флуктуации Wa (coi) и Wa (со2) угла прихода в области инерционСд-структурная характеристика атмосферы;L - дальность до объекта или источника
излучения;
L0 - внешний масштаб турбулентности, позволяет сократить время измерения примерно на два порядка и повысить точность измерения угла рефракции за счет учета статистики распределения углов прихода.
.. .. „ ч„ ,г. .„ .... ... ., ,По полученным данным значений флукного диапазона частот (2, фиг. 2) определитьЮ туаций угла прихода на частотах coi и cog
значение флуктуации угла прихода на низ-определяют поперечную скорость V, по знаких частотах, т. е. в области о со/па (3,чению которой определяют значение частоты
фиг. 2), и определить тем самым угол реф-com(U (фиг. 2) по выражению, получаемому
ракции.из (1) при разложении его в ряд при D
Использование закона распределения и дифференцировании по со, т. е.
флуктуации угла прихода Wa (со), например,..
для случая плоской волны -1 Qt;Q-
Уа/3СШг.со Д
Щсо)0,0652D2
1 -cos
YJX
comax l,853f4 LQ
Далее по полученному значению comax определяют тип стратификации атмосферы
X
/2лл« л (0/
1+(Ж)24/3
где со - круговая частота; D - диаметр апертуры; V - поперечная по трассе скорость ветра, м/с;
Сд-структурная характеристика атмосферы;L - дальность до объекта или источника
излучения;
L0 - внешний масштаб турбулентности, позволяет сократить время измерения примерно на два порядка и повысить точность измерения угла рефракции за счет учета статистики распределения углов прихода.
По полученным данным значений флук..
-1 Qt;Q-
comax l,853f4 LQ
Далее по полученному значению comax определяют тип стратификации атмосферы
и принимают устойчивый тип стратификации, например, при и неустойчивый при сошах соо, где .
Измеряют давление, температуру воздуха в точке наблюдения известными методами. Измеряют также дальность до объекта, например оптическим методом, и вычисляют угол рефракции по формуле
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля прямолинейности и устройство для его осуществления | 1989 |
|
SU1739195A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ЗНАЧЕНИЙ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ ВОЗДУХА, УГЛОВ БОКОВОЙ И ВЕРТИКАЛЬНОЙ РЕФРАКЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2382985C2 |
| Способ определения угла рефракции и устройство для его осуществления | 1987 |
|
SU1545181A1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
| Дистанционный способ определения интенсивности ветровой, температурной и оптической турбулентности | 2022 |
|
RU2797644C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА НЕСКОЛЬКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2075727C1 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ С КАНАЛОМ ОПТИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ (ВАРИАНТЫ) | 2009 |
|
RU2410722C1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА ЛУЧЕЙ | 1992 |
|
RU2039968C1 |
| Устройство для измерения углов с коррекцией влияния рефракции | 1984 |
|
SU1213395A1 |
Изобретение относится к измерительным устройствам и позволяет измерить угол вертикальной рефракции. Цель изобретения - повышение точности и сокращение времени измерения. Способ заключается в определении флуктуаций угла прихода отраженного от объекта наблюдения светового пучка, преобразовании его колебаний в электрические сигналы, фильтрации сигналов на двух частотах, выбираемых в инерционном интервале, измерении флуктуации на этих частотах, определении частоты, соответствующей максимуму флуктуаций, определении давления, температуры воздуха, дальности до объекта, типа стратификации атмосферы, средней высоты светового пучка над поверхностью и определении угла рефракции по приведенной формуле. 2 з.п. ф-лы, 2 ил.
-7
, 0,605T DW OJ)WVi/H T-Y)2j
,1910 + -J(0,0652)/z (2r)
ъ. р.
где 1/ - поперечная по трассе скорость ветра, определяемая из уравнения
з.ц (b-1 M +6Ьа,а)72 2-+4Ьа 3+6а V Vаг7ь::ТУ +2Ьа ;ьа Ж
W,,co, /co,s/3 л
где ; - ; бсо со2-со,; а2 Wa(co2) to2/
-0,4967; а, 0,03705.
Устройство (фиг. 1) для осуществления способа содержит оптическую систему 1, которая состоит из последовательно установленных линзы 2 и светофильтра 3, датчик 2 флуктуации углового положения светового пучка, который установлен в фокусе линзы 2, блок 5 перестраиваемых фильтров, блок 6 задания исходных данных, блок 7 sgnA, вычислитель 8, индикатор 9. В качестве датчика 4 флуктуации углового положения светового пучка может быть использован например, фотоэлектрический позиционно- чувствительный датчик или на основе матричных элементов. Блок 5 перестраиваемых фильтров состоит из перестраиваемых фильтров, настраиваемых на частоты, соответствующие интервалу инерционного диапазона
2/3
WVi/H T-Y)2j
ъ. р. j e
(i)
(3)
частот (область частот 6,3-10 2-6,3 X ХЮ3 с-1).
Блок 6 задания исходных данных может быть выполнен в виде пульта управления, на котором оператор устанавливает предварительно полученные данные о температуре, давлении воздуха, дальности до объекта, значение опорной частоты соо. В качестве блока 6 может быть использована также входная шина вычислителя или магазин сопротивлений с источником питания.
В качестве вычислителя 8 используется любой вычислитель, реализующий алгоритм вычисления по выражениям (2) и (3).
Предложенный способ определения угла рефракции реализуется следующим образом.
Световой пучок (фиг. 1) от источника излучения или отраженный от объекта наблюдения принимается с помощью оптической системы 1, в фокусе которой установлен
датчик 4 флуктуации угла прихода светового пучка. Измерение угла прихода светового пучка производится путем преобразования оптического сигнала в электрические сигналы, которые после фильтрации в блоке 5 перестраиваемых фильтров подаются на второй и третий входы вычислителя 8.
Частоты о)| и (02 выбирают возможно ближе к частоте (со) диссипации для уменьшения времени измерения. Определение типа стратификации атмосферы производится путем сравнения штах, получаемой в вычислителе 8, с опорной частотой шо, значение которой может быть задано в зависимости от типа измерительной трассы или исследуемой среды. Получаемый на выходе блока sgnA знак разности значений частот соо и поступает на вход вычислителя, который выдает на индикатор 9 значение угла рефракции.
ЛР L -0,19-1
0,605
652)
где Wa(co) - флуктуации угла прихода на частоте ш;
ш - круговая частота;
р - значение радиана в секундах;
Т -температура воздуха;
Р -давление воздуха;
V - поперечная скорость ветра;
D -диаметр приемной апертуры;
L - дальность до объекта;
h - средняя высота светового пучка над поверхностью;
LO - внешний масштаб турбулентности;
Кд - постоянный коэффициент.
Фиг.1
0
Формула изобретения
флуктуации углового положения светового пучка, а также вычислитель, индикатор, блок задания исходных данных, соединенный первым выходом с первым входом вычислителя, первый выход которого соединен с входом индикатора, отличающееся тем, что, с целью повышения точности и сокращения времени измерения, в него введены блок определения знака и блок перестраиваемых фильтров, первый и второй входы которого соединены соответственно с выходом датчика флуктуации углового положения светового пучка и с вторым выходом блока задания исходных данных, а выход - с вторым входом вычислителя, первый и второй входы блока определения знака соединены соответственно с третьим выходом блока задания исходных 0 данных и с вторым выходом вычислителя, а выход - с третьим входом вычислителя.
5
«VI
I
| Дементьев В | |||
| Е | |||
| Определение вертикальной рефракции по флуктуациям угла прихода светового пучка.-Квантовая электроника, 1982, т | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Щетки для коллекторных машин | 1920 |
|
SU789A1 |
| Носов В | |||
| В., Поплаухин В | |||
| Н | |||
| и Труба- чеев Э | |||
| А | |||
| Метод измерений флуктуации смещений оптических изображений в приземном слое.-В сб.: VII Всесоюзный симпозиум по распространению лазерного излучения в атмосфере, тез | |||
| докл., ч | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
