Изобретение относится к инженерной геодезии и предназначено для автоматизированного геодезического контроля прямолинейности объектов большой длины, в частности направляющих рельсов массового технологического оборудования, в том числе рельсов подкрановых путей.
Известен способ контроля прямолинейности, включающий формирование светового луча, задание с помощью светового луча референтного направления по всей длине контролируемого объекта, стабилизацию пространственного положения референтного направления посредством цепочки обратной связи, проведение измерения непрямолинейности контролируемых точек и вычислительную обработку по определению непрямолинейности объекта.
Недостатком способа является низкая точность контроля прямолинейности объектов большой длины, обусловленная влиянием атмосферных турбуленции и рефракции Известен также способ определения геометрии рельсового пути с помощью лазера, включающий формирование светового луча, задание с помощью светового луча референтного направления, разделение рельсового пути на отдельные участки контроля, измерение непрямолинейности контролируемых точек рельсового пути на каждом отдельном участке и вычислительную обработку по определению геометрии рельсового пути.
Недостатком способа является низкая точность контроля прямолинейности рельсового пути, обусловленная нестабильностью пространственного положения луча лазера и влиянием атмосферныхтурбуленции и рефракции.
00
5
5
ся
Наиболее близким к изобретению является способ контроля прямолинейности, включающий формирование светового луча, задание посредством светового луча референтного направления по всей длине конт- ролируемого объекта, выполнение синхронных измерений в линейной мере отклонений точек объекта от прямолинейности и нестабильности задания референтного направления, вызванной не- стабильностью пространственного положения луча лазера и изменением распределения интенсивности светового потока в поперечном сечении пучка, а также вычислительную обработку измеренных па- раметров и определение прямолинейности объекта.
Недостатком способа является низкая точность измерение нелрямолинейности объектов большой длины, обусловленная влиянием атмосферы на результаты контроля (поглощение и рассеивание светового пучка, искривление референтного направ- ле-ния под действием атмосферных турбу- ленции и рефракции) и неучетом линейной составляющей нестабильности положения луча лазера.
Цель изобретения - повышение точности контроля прямолинейности объектов большой длины.
Поставленная цель достигается тем, что согласно способу контроля прямолинейности, заключающемуся в том, что формируют световой луч, задают с помощью светового луча референтные направления, синхронно измеряют в линейной мере отклонения контролируемых точек объекта от прямолиней- ности и нестабильность задания референтного направления и вычисляют непрямолинейность объекта с использовани- ем измеренных параметров, на объекте измеряемый участок делят на отрезки контроля, референтные направления задают последовательно на дискретных отрезках контроля, длина которых ограничивает внешними условиями измерений, измеряют взаимное положение дискретных отрезков контроля, наряду с линейной производят дополнительные синхронные измерения отклонений контролируемых точек объекта от прямолинейности и нестабильности задания референтного направления в угловой мере, а прямолинейность объекта вычисляют с учетом этих параметров.
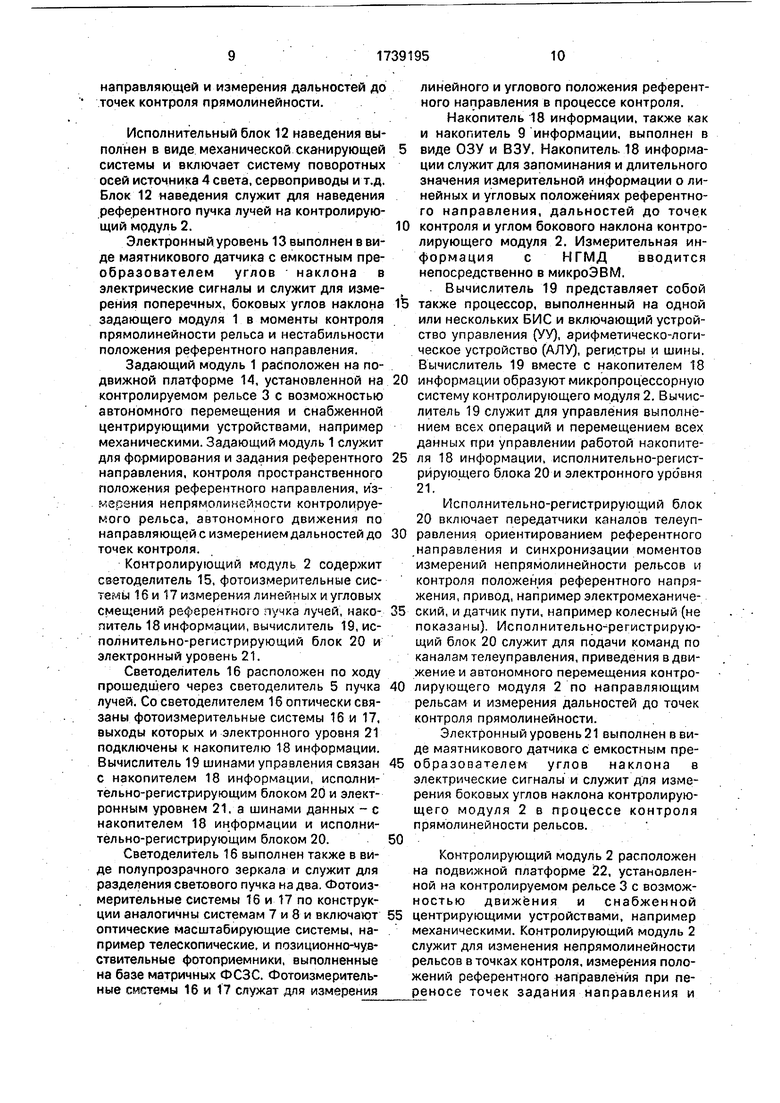
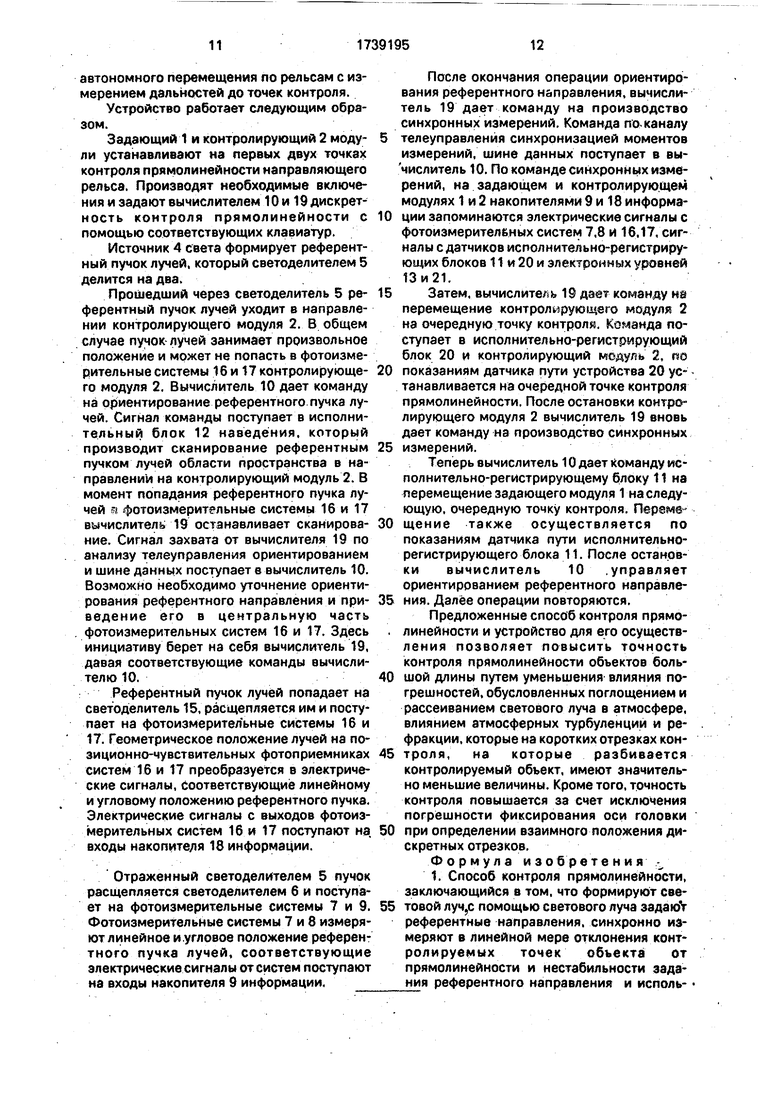
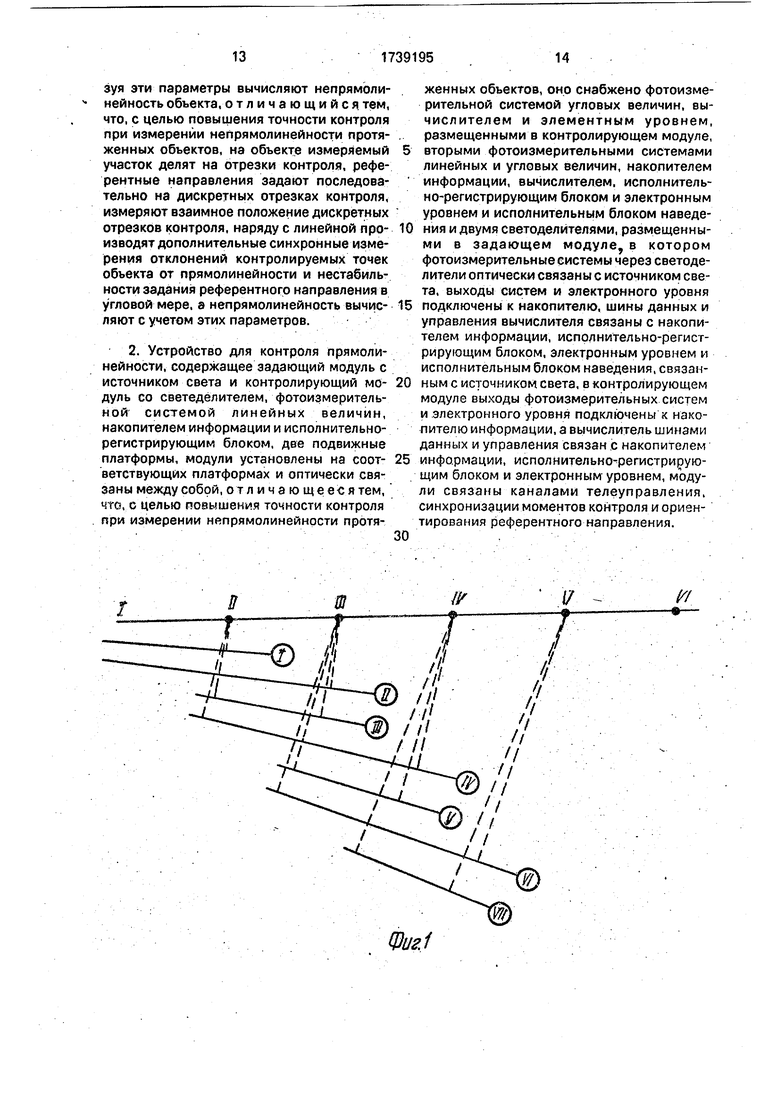
На фиг.1 приведена схема измерения непрямолинейности контролируемого объекта; на фиг.2 - структурная схема устройства.
Реализующее предложенный способ устройство контроля прямолинейности уста на вливают на первых двух точках объекта контроля, на точках I и И (фиг.1). Формируют световой луч и посредством светового луча задают референтное направление на участке HI, Производят синхронные измерения в линейной и угловой мерах на точке I - положения первого, принимаемого, например за исходный, референтного направления, на точке II - непрямолинейности второй точки контроля относительно первого референтного направления. Затем устройство перемещают с точки II на точку 111 объекта контроля. Задают референтное направление на участке HI. Выполняют синхронные измерения в линейной и угловой мерах на участке НИ, на точке I - положения второго референтного направления, на точке III - непрямолинейности третьей точки контроля относительно второго референтного направления. Цикл измерительных операций заканчивается перемещением устройства с точки I на точку II объекта контроля. Заданием референтного направления на участке II и III. Произвол ством синхронных измерений в линейной t« угловой мерах на участке II-IH, на точке III - положения третьего референтного направления, на точке II - непрямолинейности второй точки контроля относительно третьего референтного направления. Далее циклическая последовательность операций продолжается.
Вычисление непрямолинейности контролируемого протяженного объекта, например направляющего рельса, с помощью предложенного способа выполняют следующим образом.
В общем случае непрямолинейность точек контроля вычисляют по формуле
Yi qn;
qi2 P12 -Ьдз2Рз2 .
P12 + P32
q23. Раз + qb Рвз .
P23 + P53
Y2
УзYH.I - & Ц P () + bv-3Kn-t fr2 -3Xn-D. P(2n-fcXn-1) +P(2n-OXr -t)
Yn q1(2n-4)n,
где qji - измеренное линейное положение j-ro референтного направления на 1-ой точке контроля;
q1ji - непрямолинейность в линейной мере, 1-й точки контроля относительно J-ro референтного направления, приведенная к исходному, например первому, референтному направлению;
PJI - вес соответствующего значения;
n - общее количество точек контроля прямолинейности направляющего рельса.
Приведенное значение непрямолинейности q ji вычисляют по формулам
,)()- ( -Кчг.- ьЬз,,,,); lU 4«-Bv UfSis5in( г, -с4„)}
и ЧЛ М- ИмЭЧвйм- } -Й«-сЬ 5о9;пК,)-()-5„ « ( -(Vl )45 (1,-,)}
) 4(«n-sKMLfaten. 1(7h-r)(n г)Ь5(п Jl(-i)sin(Ws)b. -°WrHn-)flКч.«гЧ..) +
+ 5(«1-.)в;п(«4г.,КЬ Н(г« э|(п-1Г V-Жп-.Г KV. )iTty.H)rf
-SMn5 K2n.i,n-«i(2n4)nl
-4(h,-(U+4.-.)5l(.-,,i:b
где egi - угловое положение j-ro референтного направления не 1-й контроля,
S - расстояние ме еду точками.
Для осуществления предложенного способа требуется устройство контроля прямолинейности.
Известно устройство для контроля прямолинейности, содержащее источник света, измерительную каретку s акустооптической ячейкой, объективом и фотоприемником, а также цепочку обратной связи, включающую позиционно-чувствительный фотопреобразователь, усилитель и исполнительный механизм, кинематически связанный с источником света, и регистрирующий блок.
Недостатком устройства является низкая точность контроля прямолинейности объектов большой длины, обусловленная влиянием атмосферных турбуленции и рефракции.
Известно также устройство для определения геометрии рельсового пути с помощью лазера, содержащее лазер, установленный на подвижной каретке, и измерительную систему. Измерительная система включает чувствительные преобразователи, приемник лазерного излучения, схему обработки и расположена также на подвижных каретках. Чувствительные преобразователи определяют положение рельса относительно измерительной системы, а приемник лазерного излучения - положение лазерного луча в плоскости, заданной чувствительными преобразователями.
Недостатком устройства является низкая точность контроля прямолинейности
5 рельсового пути, обусловленная влиянием нестабильности пространственного положения луча лазера и атмосферных турбуленции и рефракции.
Наиболее близким к изобретению явля0 ется фотоэлектрическое устройство для контроля прямолинейности, содержащее источник света, оптически связанные с ним - расщепитель пучка лучей, фотоприемник, расположенные на каретке, и второй фото5 приемник, установленный на фиксированном расстоянии от источника света. Устройство содержит также преобразователь облученности в электрический сигнал, входы которого подключены к выходам фо0 топриемников, а выход - к фильтру, электрически связанному с регистрирующим прибором. Постоянная времени фильтра находится в функциональной зависимости от текущей дальности между источником света
5 и фотоприемником, расположенным на каретке. Известное устройство позволяет повысить точность контроля путем исключения ошибок из-за непостоянства положения источника света, пространст5 венной нестабильности положения луча лазера, из-за изменения распределения интенсивности светового потока в сечении пуска и уменьшить дисперсию результата измерения, вызванную флуктуациями луча в
0 воздушном тракте.
Недостатком фотоэлектрического устройства является низкая точность контроля прямолинейности объектов большой длины, обусловленная влиянием атмосферы на ре5 зультаты контроля (поглощение и рассеивание светового пучка, искривление референтного направления под действием турбуленции и рефракции).
Цель изобретения - повышение точно0 сти контроля прямолинейности объектов большой длины.
Цель достигается тем, что предложен- ное устройство контроля прямолинейности, содержащее задающий модуль с источни5 ком света и контролирующий модуль со светоделителем, фотоизмерительной системой линейных величин, накопителем информации и исполнительно-регистрирующим блоком, две подвижные платформы, при этом модули установлены на соответствующих
5 платформах и оптически связаны между собой, снабжено фотоизмерительной системой угловых величин, вычислителем и электронным уровнем, размещенными в контролируемом модуле, вторыми фотоизмерительными системами линейных и угловых величин, накопителем информации, вы- числителем, исполнительно-регистрирующим блоком и электронным уровнем и исполнительным блоком наведения и двумя светоделителями, размещенными в задающем модуле, в котором фотоизмерительные системы через светоделители оптически связаны с источником света, выходы систем и электронного уровня подключены к накопителю, шины данных и управления вычислителя связаны с накопителем информации, исполнительно-регистрирующим блоком, электронным уровнем и исполнительным блоком наведения, связанным с источником света, в контролирующеммодулевыходыфотоизмерительных систем и электронного уровня подключены ч накопителю информации, а вычислитель шинами данных и управления связан с накопителем информации, исполнительно-регистрирующим блоком и электронным уровнем, кроме того, модули связаны между собой каналами телеуправления, синхронизации моментов контроля и ориентирования референтного направления,
Устройство содержит задающий 1 и контролирующий 2 модули (фиг.2), связанные между собой оптически и посредством каналов телеуправления, установленные на контролируемой направляющей 3 с возможностью автономного перемещения.
Задающий модуль 1 содержит источник 4 света, светоделители 5 и 6, фотоизмерительные системы 7 и 8 измерения линейных и угловых смещений референтного пучка лучей, накопитель 9 информации, вычислитель 10, исполнительно-регистрирующий блок 11, исполнительный блок 12 наведения и электронный уровень 13.
Светоделитель В расположен по ходу отраженного светоделителем 5 пучка лучей. Со светоделителем 6 оптически связаны фотоизмерительные системы 7 и 8. Выходы фотоизмерительных систем 7 и 8 и электронного уровня 13 подключены к накопителю 9 информации. Вычислитель 10 шинами управления связан с накопителем 9 информации, исполнительно-регистрирующим, блоком 11, исполнительным блоком наведения и электронным уровнем 13, а шиной данных - с исполнительно-регистрирующим блоком 11 и накопителем информации.
Источник 4 света включает источник лазерного излучения и оптическую коллимиру- ющую систему (не показаны) и служит для формирования референтного направления. Светоделители 5 и 6 выполнены в виде полупрозрачных зеркал и служат для разделения светового пучка. Фотоизмерительные системы 7 и 8 включают оптические масштабирующие системы, например телескопические и позиционно-чувствительные
фотоприемники, выполненные на базе матричных ФСЗС (фоточувствительные схемы с зарядовой связью). Фотоизмерительные системы 7 и 8 служат для измерения линейных и угловых смещений референтного пучка лучей, вызванных нестабильностью пространственного положения луча лазера.
Накопитель 9 информации выполнен в виде запоминающих устройств: ОЗУ - оперативного запоминающего устройства, например на полупроводниковых элементах, ВЗУ - внешнего запоминающего устройства, например на базе НГМД-накопителя на гибком магнитном диске. Накопитель 9 информации служит для запоминания и длительного хранения измерительной информации о линейном и угловом положении референтного направления в моменты контроля прямолинейности, дальностей до точек контроля и углов бокового наклона
задающего модуля 1, вызванных наклоном верхней грани головки рельса. Измерительная информация с НГМД, например, непосредственно вводится в микроЭВМ, где производится вычислительная обработка
результатов измерений по заданной программе и вывод данных, например, АПУ (автоматическое печатающее устройство).
Вычислитель 10 представляет собой процессор, выполненный на одной или нескольких БИС и включающий устройство управления (УУ), арифметическо-логическое устройство (АЛУ), регистры и шины. Вычислитель 10 вместе с накопителем 9 информации образуют микропроцессорную систему
задающего модуля 1. Вычислитель 10 служит для управления выполнением всех операций и перемещением всех данных при управлении работой накопителя 9 информации, исполнительно-регистрирующего блокэ 11, исполнительного блока 12 наведения и электронного уровня 13.
Исполнительно-регистрирующий блок 11 включает приемники каналов телеуправления процессами ориентирования референтного направления и синхронизации моментов измерения непрямолинейности направляющего рельса и нестабильности задания референтного направления, эяектромеханический привод и датчик пути, например колесный (не показаны). Исполнительно-регистрирующий блок 11 служит для приема команд по каналам телеуправления, автономного перемещения задающего модуля 1 по контролируемой
направляющей и измерения дальностей до точек контроля прямолинейности.
Исполнительный блок 12 наведения выполнен в виде механической сканирующей системы и включает систему поворотных осей источника 4 света, сервоприводы и т.д. Блок 12 наведения служит для наведения референтного пучка лучей на контролирующий мрдуль 2.
Электронный уровень 13 выполнен в виде маятникового датчика с емкостным преобразователем углов наклона в электрические сигналы и служит для измерения поперечных, боковых углов наклона задающего модуля 1 в моменты контроля прямолинейности рельса и нестабильности положения референтного направления.
Задающий модуль 1 расположен на подвижной платформе 14, установленной на контролируемом рельсе 3 с возможностью автономного перемещения и снабженной центрирующими устройствами, например механическими. Задающий модуль 1 служит для формирования и задания референтного направления, контроля пространственного положения референтного направления, и з- кесения непрямолиьсйности контролируемого рельса, автономного движения по направляющей с измерением дальностей до точек контроля.
Контролирующий модуль 2 содержит светоделитель 15, фотоизмерительные системы 16 и 17 измерения линейных и угловых смещений референтного пучка лучей, накопитель 18 информации, вычислитель 19, исполнительно-регистрирующий блок 20 и электронный уровень 21.
Светоделитель 16 расположен по ходу прошедшего через светоделитель 5 пучка лучей. Со светоделителем 16 оптически связаны фотоизмерительные системы 16 и 17, выходы которых и электронного уровня 21 подключены к накопителю 18 информации. Вычислитель 19 шинами управления связан с накопителем 18 информации, исполнительно-регистрирующим блоком 20 и электронным уровнем 21, а шинами данных - с накопителем 18 информации и исполнительно-регистрирующим блоком 20.
Светоделитель 16 выполнен также в виде полупрозрачного зеркала и служит для разделения светового пучка на два. Фотоизмерительные системы 16 и 17 по конструкции аналогичны системам 7 и 8 и включают оптические масштабирующие системы, например телескопические, и позиционно-чув- ствительные фотоприемники, выполненные на базе матричных ФСЗС. Фотоизмерительные системы 16 и 17 служат для измерения
линейного и углового положения референтного направления в процессе контроля.
Накопитель 18 информации, также как и накопитель 9 информации, выполнен в 5 виде ОЗУ и ВЗУ. Накопитель. 18 информации служит для запоминания и длительного значения измерительной информации о линейных и угловых положениях референтного направления, дальностей до точек
10 контроля и углом бокового наклона контролирующего модуля 2. Измерительная информация с НГМД вводится непосредственно в микроЭВМ.
Вычислитель 19 представляет собой
15 также процессор, выполненный на одной или нескольких БИС и включающий устройство управления (УУ), арифметическо-логи- ческое устройство (АЛУ), регистры и шины. Вычислитель 19 вместе с накопителем 18
0 информации образуют микропроцессорную систему контролирующего модуля 2. Вычислитель 19 служит для управления выполнением всех операций и перемещением всех данных при управлении работой накопите5 ля 18 информации, исполнительно-регистрирующего блока 20 и электронного уровня 21.
Исполнительно-регистрирующий блок 20 включает передатчики каналов телеуп0 равления ориентированием референтного направления и синхронизации моментов измерений непрямолинейности рельсов и контроля положения референтного напряжения, привод, например электромеханиче5 ский, и датчик пути, например колесный (не показаны). Исполнительно-регистрирующий блок 20 служит для подачи команд по каналам телеуправления, приведения в движение и автономного перемещения контро0 лирующего модуля 2 по направляющим рельсам и измерения дальностей до точек контроля прямолинейности.
Электронный уровень 21 выполнен в виде маятникового датчика с емкостным пре5 образователен углов наклона в электрические сигналы и служит для измерения боковых углов наклона контролирующего модуля 2 в процессе контроля прямолинейности рельсов.
0
Контролирующий модуль 2 расположен на подвижной платформе 22, установленной на контролируемом рельсе 3 с возможностью движения и снабженной
5 центрирующими устройствами, например механическими. Контролирующий модуль 2 служит для изменения непрямолинейности рельсов в точках контроля, измерения положений референтного направления при переносе точек задания направления и
автономного перемещения по рельсам с измерением дальностей до точек контроля.
Устройство работает следующим образом.
Задающий 1 и контролирующий 2 модули устанавливают на первых двух точках контроля прямолинейности направляющего рельса. Производят необходимые включения и задают вычислителем 10 и 19 дискретность контроля прямолинейности с помощью соответствующих клавиатур.
Источник 4 света формирует референтный пучок лучей, который светоделителем 5 делится на два.
Прошедший через светоделитель 5 референтный пучок лучей уходит в направлении контролирующего модуля 2. В общем случае пучок лучей занимает произвольное положение и может не попасть в фотоизмерительные системы 16 и 17 контролирующего модуля 2. Вычислитель 10 дает команду на ориентирование референтного пучка лучей. Сигнал команды поступает в исполнительный блок 12 наведения, который производит сканирование референтным пучком лучей области пространства в направлении на контролирующий модуль 2. В момент попадания референтного пучка лучей ч фотоизмерительные системы 16 и 17 вычислитель 19 останавливает сканирование. Сигнал захвата от вычислителя 19 по анализу телеуправления ориентированием и шине данных поступает в вычислитель 10. Возможно необходимо уточнение ориентирования референтного направления и приведение его в центральную часть фотоизмерительных систем 16 и 17. Здесь инициативу берет на себя вычислитель 19, давая соответствующие команды вычислителю 10.
Референтный пучок лучей попадает на светоделитель 15, расщепляется им и поступает на фотоизмерительные системы 16 и 17. Геометрическое положение лучей на по- зиционно-чувствительных фотоприемниках систем 16 и 17 преобразуется в электрические сигналы, соответствующие линейному и угловому положению референтного пучка. Электрические сигналы с выходов фотоизмерительных систем 16 и 17 поступают на входы накопителя 18 информации.
Отраженный светоделителем 5 пучок расщепляется светоделителем 6 и поступает на фотоизмерительные системы 7 и 9. Фотоизмерительные системы 7 и 8 измеряют линейное и угловое положение референтного пучка лучей, соответствующие электрические сигналы от систем поступают на входы накопителя 9 информации,
После окончания операции ориентирования референтного направления, вычислитель 19 дает команду на производство синхронных измерений. Команда по. каналу
телеуправления синхронизацией моментов измерений, шине данных поступает в вы- числитель 10. По команде синхронных измерений, на задающем и контролирующем модулях 1 и 2 накопителями 9 и 18 информа0 ции запоминаются электрические сигналы с фотоизмерителбных систем 7.8 и 16.17, сигналы с датчиков исполнительно-регистрирующих блоков 11 и 20 и электронных уровней 13и21.
5 Затем, вычислитель 19 дает команду на перемещение контролирующего модуля 2 на очередную точку контроля. Команда поступает в исполнительно-регистрирующий блок 20 и контролирующий модуль 2, по
0 показаниям датчика пути устройства 20 устанавливается на очередной точке контроля прямолинейности. После остановки контролирующего модуля 2 вычислитель 19 вновь дает команду на производство синхронных
5 измерений.
Теперь вычислитель 10 дает команду исполнительно-регистрирующему блоку 11 на перемещение задающего модуля 1 наследующую, очередную точку контроля. Перемв0 щение также осуществляется по показаниям датчика пути исполнительно- регистрирующего блока 11. После остановки вычислитель 10 .управляет ориентированием референтного направле5 ния. Далее операции повторяются.
Предложенные способ контроля прямо- . линейности и устройство для его осуществления позволяет повысить точность контроля прямолинейности объектов боль0 шой длины путем уменьшения влияния погрешностей, обусловленных поглощением и рассеиванием светового луча в атмосфере, влиянием атмосферных турбуленции и рефракции, которые на коротких отрезках кон5 троля, на которые разбивается контролируемый объект, имеют значительно меньшие величины. Кроме того, точность контроля повышается за счет исключения погрешности фиксирования оси головки
0 при определении взаимного положения дискретных отрезков.
Формула изобретения 1. Способ контроля прямолинейности, заключающийся в том, что формируют све5 товой луч,с помощью светового луча задают референтные направления, синхронно измеряют в линейной мере отклонения контролируемых точек объекта от прямолинейности и нестабильности задания референтного направления и исполь-
зуя эти параметры вычисляют непрямолинейность объекта, отличающийся тем, что, с целью повышения точности контроля при измерении непрямолинейности протяженных объектов, на объекте измеряемый участок делят на отрезки контроля, референтные направления задают последовательно на дискретных отрезках контроля, измеряют взаимное положение дискретных отрезков контроля, наряду с линейной производят дополнительные синхронные измерения отклонений контролируемых точек объекта от прямолинейности и нестабильности задания референтного направления в угловой мере, а непрямолинейность вычисляют с учетом этих параметров.
2. Устройство для контроля прямолинейности, содержащее задающий модуль с источником света и контролирующий модуль со светеделителем, фотоизмерительной системой линейных величин, накопителем информации и исполнительно- регистрирующим блоком, две подвижные платформы, модули установлены на соответствующих платформах и оптически связаны между собой, отличающееся тем, что, с целью поэышения точности контроля при измерении непрямолинейности протяженных объектов, оно снабжено фотоизмерительной системой угловых величин, вычислителем и элементным уровнем, размещенными в контролирующем модуле, 5 вторыми фотоизмерительными системами линейных и угловых величин, накопителем информации, вычислителем, исполнительно-регистрирующим блоком и электронным уровнем и исполнительным блоком наведе0 ния и двумя светоделителями, размещенными в задающем модуле, в котором фотоизмерительные системы через светоделители оптически связаны с источником света, выходы систем и электронного уровня
5 подключены к накопителю, шины данных и управления вычислителя связаны с накопителем информации, исполнительно-регистрирующим блоком, электронным уровнем и исполнительным блоком наведения, связан0 ным с источником света, в контролирующем модуле выходы фотоизмерительных систем и электронного уровня подключены к накопителю информации, а вычислитель шинами данных и управления связан с накопителем
5 информации, исполнительно-регистрирующим блоком и электронным уровнем, модули связаны каналами телеуправления, синхронизации моментов контроля и ориентирования референтного направления.
0

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| Устройство для контроля прямолинейности направляющих рельсов | 1987 |
|
SU1482844A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ОТ ПРЯМОЛИНЕЙНОСТИ | 1994 |
|
RU2094756C1 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ НЕПРЯМОЛИНЕЙНОСТИ | 2015 |
|
RU2603999C1 |
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |
| Интерферометр для измерения неплоскостности и непрямолинейности поверхностей | 1982 |
|
SU1046606A1 |
| Интерферометр для измерения перемещений двухкоординатного стола | 1979 |
|
SU861932A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ УГЛОИЗМЕРИТЕЛЬНЫХ СТРУКТУР, НАНОСИМЫХ НА ПРОЗРАЧНЫЙ НОСИТЕЛЬ | 2003 |
|
RU2242715C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОВЕРХНОСТИ ОБЪЕКТА | 1990 |
|
SU1769574A1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение точности контроля при измерении непрямолинейности протяженных объектов. Способ заключается в последовательном задании референтного направления посредством светового луча на дискретных отрезках контроля, на которые разбивают контролируемый обьект, в синхронных измерениях в линейной и угловой мерах непрямолинейности контролируемых точек объекта и нестабильности задания референтного направления, в измерении взаимного положения дискретных отрезков между собой и в вычислении непрямолинейности объекта контроля Устройство содержит задающий и контролирующий Модули, связанные между собой оптически и посредством каналов телеуправления. 2 с.п.ф-лы, 2 ил. (Л С
Фиг1
| Устройство для контроля прямолинейности | 1986 |
|
SU1427179A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для чесания льна и т.д. | 1926 |
|
SU4447A1 |
| Фотоэлектрическое устройство для контроля прямолинейности | 1973 |
|
SU641274A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
