4Ь 1
сл 1
О
1
10
Изобретение относится к передачам мощности тракторов, а также других тяговых, транспортных и сельскохозяйственных машин, для которых целесообразно использование наряду с прямым их назначением еще и в качестве передвижного или резервного источника электроснабжения.
Цель изобретения - повышение эф- сЪективности путем снижения установленной мощности оборудования трансмиссии и упрощение устройств управления.
На чертеже изображена кинематичес- 15 кая схема трактора с двухпоточной электромеханической трансмиссией.
Трансмиссия 1, связывающая тепловой двигатель 2 с движителями 3,
в планетарном механизме 4, причем плавное регулирование скорости движ ния осуществляется путем регулирова ния скорости электродвигателя 10 из менением напряжения генератора 7 и частоты преобразователя 15. Двигате 14 при этом отключен контактами 19 от генератора 7 и вращается вхолостую, синхронно с валом звена 11 мех низма 4, с которым он связан переда чей 13.
В режиме электростанции трактор стоит на месте и его движители 3 от соединены муфтой 12 сцепления от трансмиссии 1 и двигателя 2. Послед ний приводится во вращение и сообща ет его через передачу 6 генератору и через промежуточное звено 8 мехавключает трехзвенный планетарный диф-20 низма 4 и передачу 9 двигателю 10,
10
15
77576 2
в планетарном механизме 4, причем плавное регулирование скорости движения осуществляется путем регулирования скорости электродвигателя 10 изменением напряжения генератора 7 и частоты преобразователя 15. Двигатель 14 при этом отключен контактами 19 от генератора 7 и вращается вхолостую, синхронно с валом звена 11 механизма 4, с которым он связан передачей 13.
В режиме электростанции трактор стоит на месте и его движители 3 отсоединены муфтой 12 сцепления от трансмиссии 1 и двигателя 2. Последний приводится во вращение и сообщает его через передачу 6 генератору 7 и через промежуточное звено 8 меха

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическая двухпоточная трансмиссия | 1987 |
|
SU1428603A1 |
| Способ управления двухпоточной электромеханической трансмиссией переменного тока в режиме электростанции транспортного средства | 1987 |
|
SU1567417A1 |
| Способ управления трактором с двухпоточной электромеханической трансмиссией переменного тока в режиме электростанции | 1987 |
|
SU1473985A1 |
| Способ перевода в режим электростанции транспортного средства с двухпоточной электромеханической трансмиссией переменного тока | 1987 |
|
SU1472298A1 |
| Электромеханическая двухпоточная трансмиссия | 1988 |
|
SU1604637A1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2459715C1 |
| СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2019 |
|
RU2724214C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| Электромеханическая двухпоточная трансмиссия | 1988 |
|
SU1684114A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2001 |
|
RU2179119C1 |
Изобретение относится к передачам мощности тракторов, а также других тяговых, транспортных и сельскохозяйственных машин, для которых целесообразно использование наряду с прямым назначением в качестве передвижного источника электрической энергии. Цель изобретения - повышение эффективности путем снижения установленной мощности оборудования трансмиссии и упрощение устройств управления. В трансмиссии 1, содержащей трехзвенный планетарный механизм 4, две тяговые электрические машины и дополнительный двигатель 14 связаны с элементами механизма. Дополнительный двигатель выполнен в виде электрического двигателя переменного тока, связанного посредством выключателя 18 с выходными клеммами генератора 7, а передаточное отношение его кинематической связи с выходным звеном планетарного механизма выбрано из приведенных условий для случаев использования синхронного и асинхронного двигателей. 1 ил., 2 з.п. ф-лы.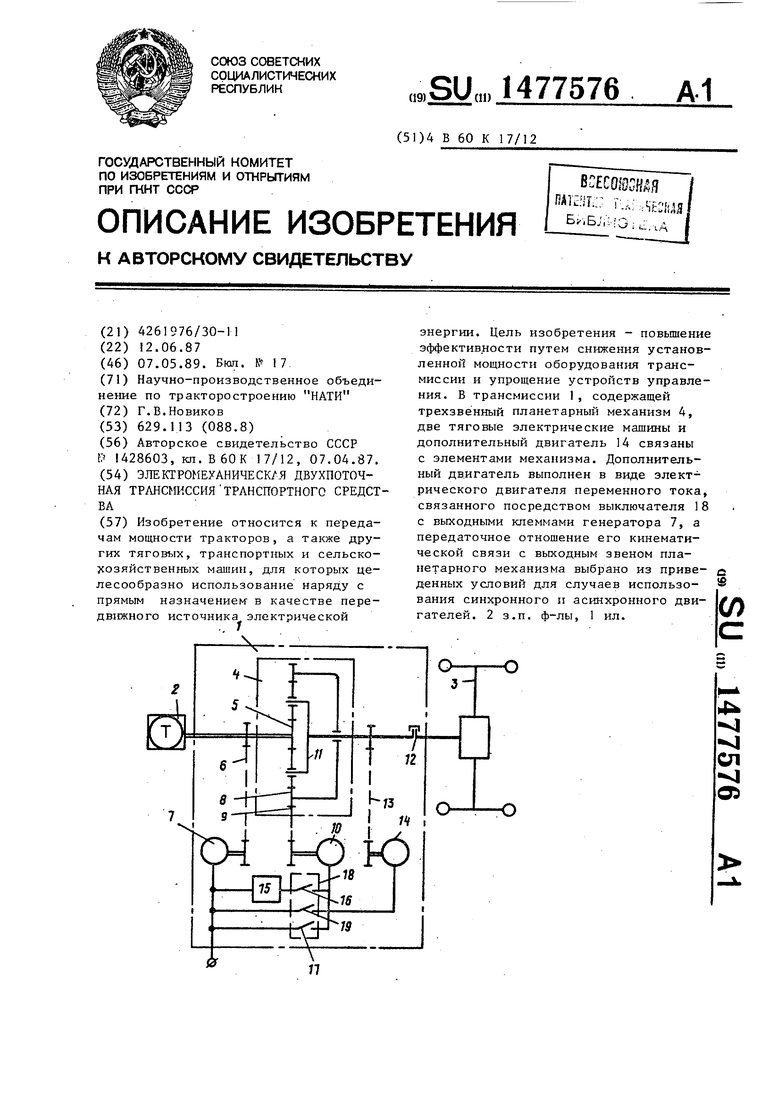
ференциальный механизм 4, входное звено 5 которого связано с тепловым двигателем 2 и посредством кинематической связи 6 с тяговым синхронным генератором 7, промежуточное звено 8 посредством кинематической связи 9 - с тяговым асинхронным двигателем 10, а выходное звено 11 посредством муфты 12 сцепления - с движителями 3 и посредством кинематической связи 13 с дополнительным электрическим двигателем 14 переменного тока.
Синхронный генератор 7 связан электрически посредством преобразователя 15 частоты и размыкающих контак- тов 16 с тяговым асинхронным двигателем 10. Последний также связан с генератором и посредством замыкающих контактов 17 переключателя 18. Дополнительный двигатель 14 связан с генератором замыкающими контактами 19 того же переключателя 18. Дополнительным двигателем может быть любой электрический двигатель переменного тока (синхронный).
Трансмиссия работает следующим образом.
В режиме тяги мощности теплового двигателя 2 передаются на движители 3 по механическому каналу - через планетарный механизм 4 и включенную муфту 12 сцепления, и по электрическому каналу - от двигателя 2 через генератор 7 и преобразователь 15 частоты, замкнутые контакты 16 переклю- чателя 18 на электрический асинхронный двигатель 10 и далее через плане- тарный механизм 4 и муфту 12 сцепления. Оба потока мощности суммируются
ная
который отсоединен контактами 16 от преобразователя 15 и присоединен контактами 17 к выходным клеммам генератора 7.
Таким образом, обе электрические машины 7 и 10 трансмиссии 1 соединены электрически параллельно и могут работать как два генератора, причем асинхронная машина 10 получает энергию возбуждения от синхронной, а активную мощность, получаемую ими от двигателя 2, обе они отдают во внешнюю нагрузку.
Этот режим параллельной работы двух генераторов возможен лишь при согласованном вращении машин 7 и 10, когда частоты вращения их таковы, что частота вращения машины 10, рав
Ш1
(О
. - частота вращения теплового
двигателя 2,
ная частота его вращения,
Рс.г Рс.г c.r-- -ги)„
q-s
г.Л с.г
(2)
или,
где wc.r- частота вращения синхронного генератора 7, находятся в соотношении
ли,
де S а.
+ sa.,),
(3)
а - электрическое скольжение асинхронного двигателя 10 в качестве генератора, что то же самое, в соотношении
.
., u)c, Ч + baj).
(1 +
(4)
Поскольку условия (3), (4) подбором отношений ia.g и i-сг выполнить часто бывает затруднительно, для выполнения его используют дополнительный двигатель 14 переменного тока, связанный с валом звена 1I передачей 13 и подключенный контактами 19 переключателя 18 к клеммам генератора 7.
После включения возбуждения гене- ратора 7 напряжение его подается на оба двигателя 10 и 14. Последний проходит во вращение с частотой
,-f-C--,(5)
если это синхронный двигатель, и если асинхронный, то с частотой
Per
ша wc.r -- О - Sq),
9
Р
(6)
где Р - число пар полисов двигателя 14;
S . - электрическое скольжение двигателя 14.
Частота эта сообщается выходному звену 11 механизма 4 и складывается в нем с частотой вращения- двигателя 2, что приводит к изменению частоты вращения двигателя 10, в результате чего последняя оказывается соответствующей соотношениям (3), (4). При этом машина 10 оказывается имеющей генераторное скольжение, т.е. начинает работать генератором параллельно с генератором 7.
Таким образом, наличие в трансмиссии 1 синхронного генератора 7, а главное, то обстоятельство, что в режиме работы трансмиссии электростанцией, он работает с постоянными значениями частоты и напряжения, позволяет использовать для согласования режимов работы тяговых электрических машин 7 и 10 трансмиссии в качестве дополнительного двигателя 14 машину переменного тока с подключением ее не к какому-либо особому источнику питания, а к общим токосборным шинам машин 7 и 10.
При этом в трансмиссии достигается снижение установленной мощности оборудования за счет отсутствия необходимого в других случаях источника энергии для питания дополнительного двигателя и устройства управления им.
Одновременно с этим еще большее снижение установленной мощности и упрощение устройств управления может быть достигнуто путем обеспечения ре
775
JQ
20
25 30
76
жима саморегулирования этой трехма- шинной системы.
В общем случае для работы такой системы необходим регулятор частоты вращения машины 14, который следует включить между генератором 7 и машиной 14 при произвольной величине передаточных отношений кинематических связей 9 и 13. Но подбором величин -этих отношений удается систему с автоматическим регулированием преобразовать в систему с саморегулированием, отказавшись от применения как силовых регуляторов, так и устройств управления ими.
Для этого передаточное отношение от вала дополнительного двигателя 14 к валу выходного звена 11 планетарного механизма 4 должно быть выбрано из следующих соотношений.
Частота вращения ын выходного звена 11 механизма 4 при вращающихся с частотой w, выходном звене 5 и с частотой ы2 промежуточном звене 8 равна
WH -jr+y- (w, -o)4 К). (7)
Частоты вращения связанных со звеньями 5, 8 и 11 механизма 4 синхронного генератора 7, асинхронного двигателя 10 и двигателя 14 переменного тока соответственно равны
шс.г ч.гшт;
и«-Ъ i-niu i 5 i,,
(8) (9) (Ю)
д
5
откуда, подставляя (8), (9) и (10) в (7), получают выражение для частоты вращения двигателя 14 при известных значениях частот вращения машин 7 и Ю:
Ј 1 г „ic.ri ,11Ч
w«-.i;r-RH-Lw«-w-iKi (ll)
С учетом условие согласованности параллельной работы машин 7 и 10 учитывая (2) и (3), для передаточных отношений передач 6, 9 и 13 получают соотношение
ic.r «Jc.r 1 Г, ic.rPc.r
0
М
U).
K+l
1
(1 +
12)
5
+ SM)K.
Если двигатель асинхронный, то
iЈ.r P jI1 ,
Ч Pc K+l T-S/ (13)
является условием режима саморегулирования в трансмиссии 1 в релптме ее работы1электростанцией.
Если в качестве электрического двигателя переменного тока применен синхронный двигатель, то с учетом (5) из (2) получают соотношение (12), если асинхронный, то с учетом (6) получают соотношение (13),откуда видно, что указанные соотношения передаточных отношений передач 6, 9 и 13 трансмиссии 1 обеспечивают работу трактора в режиме электростанции при параллельной работе машин 7 и 10 в качестве генераторов в отсутствие дополнительных регуляторов частоты вращения двигателя 14.
Двигатель переменного тока 14 может иметь незначительную мощность, так как величина добавочной частоты вращения для согласования скоростей машин 7 и 10 обычно невелика.
Формула изобретения
775766
ключателя с выходными клеммами тягового синхронного генератора.
10
15
И
8,.,Ж,
где 1
с-г
20 р
г- ст - И-
гс.г- к 1 L -«.дЖп з
передаточное отношение кинематической связи синхронного генератора с входным звеном планетарного механизма;
с.г
- q.gi
где
Р - - числа пар полюсов синхронного генератора, асинхронного двигателя и дополнительного двигателя; К - кинематический параметр планетарного1 механизма;
i Oi - - передаточное отношение кинематической связи асинхронного двигателя с проме- ЖУТОЧНЫМ звеном;
S и.}- электрическое скольжение
тягового асинхронного двигателя.
ic.r Р 1 1
17 РГгкТТ ,
5 rc.r j-ь - электрическое полнительного двигателя.
9
| Электромеханическая двухпоточная трансмиссия | 1987 |
|
SU1428603A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
