Јь 1
00 СО
J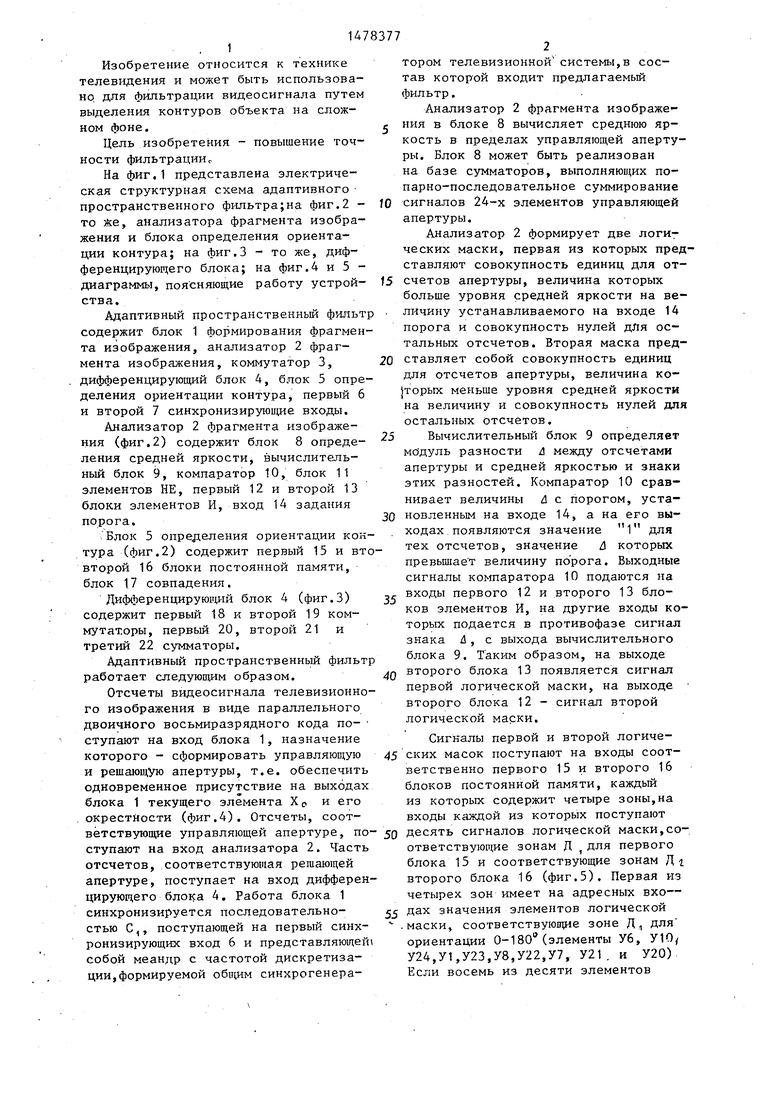
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство кодирования сигнала цветных графических изображений | 1987 |
|
SU1555917A1 |
| Электронно-копировальный прибор | 1980 |
|
SU898376A1 |
| УСТРОЙСТВО ОБРАБОТКИ ЦВЕТНЫХ ИЗОБРАЖЕНИЙ | 1999 |
|
RU2159958C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ НЕБОЛЬШИХ ИЛИ ТОНКИХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ (ВАРИАНТЫ) | 2013 |
|
RU2546600C2 |
| АДАПТИВНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 1999 |
|
RU2155981C1 |
| Кинотелевизионная камера | 1987 |
|
SU1559429A1 |
| Электронно-копировальный прибор | 1983 |
|
SU1125594A1 |
| СПОСОБ И УСТРОЙСТВО АДАПТИВНОГО РАСТРИРОВАНИЯ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЙ | 1993 |
|
RU2126598C1 |
| Электронно-копировальный прибор | 1980 |
|
SU924654A1 |
| АДАПТИВНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 1999 |
|
RU2149516C1 |


Изобретение относится к технике телевидения и может быть использовано для фильтрации видеосигнала путем выделения контуров объекта на сложном фоне. Цель изобретения - повышение точности фильтрации. Адаптивный пространственный фильтр содержит блок 1 формирования фрагмента изображения, анализатор 2 фрагмента изображения, коммутатор 3, первый 6 и второй 7 синхронизирующие входы. Для достижения цели введены дифференцирующий блок 4, содержащий два коммутатора и три сумматора, а также блок 5 определения ориентации контура, содержащий два блока постоянной памяти и блок совпадения. На выходе фильтра могут иметь место или сигнал средней яркости, что соответствует режиму низкочастотной фильтрации, следовательно, происходит сглаживание импульсных помех на гладких участках изображения, или сигнал, равный сумме текущего элемента XO и второй производной, вычисленной по окрестности 3.3 элемента, соответствующей решающей апертуре, если контур обнаружен и его ориентация достоверно определена блоком 5. 3 з.п. ф-лы, 5 ил.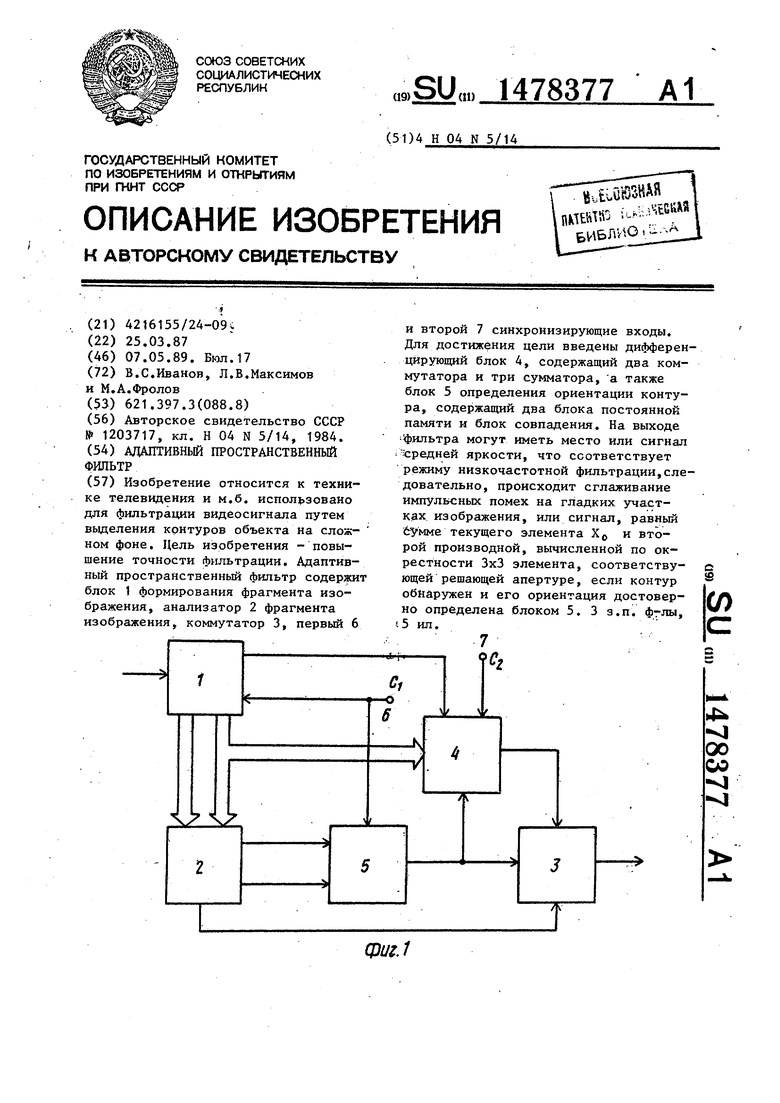
фиг.1
Изобретение относится к технике телевидения и может быть использовано для фильтрации видеосигнала путем выделения контуров объекта на сложном фоне.
Цель изобретения - повышение точности фильтрации..
На фиг.1 представлена электрическая структурная схема адаптивного пространственного фильтра;на фиг.2 - то Же, анализатора фрагмента изображения и блока определения ориентации контура; на фиг.З - то же, дифференцирующего блока; на фиг.4 и 5 - диаграммы, поясняющие работу устройства.
Адаптивный пространственный фильт содержит блок 1 формирования фрагмента изображения, анализатор 2 фрагмента изображения, коммутатор 3, дифференцирующий блок 4, блок 5 определения ориентации контура, первый 6 и второй 7 синхронизирующие входы.
Анализатор 2 фрагмента изображения (фиг.2) содержит блок 8 определения средней яркости, вычислитепь- ный блок 9, компаратор 10, блок 11 элементов НЕ, первый 12 и второй 13 блоки элементов И, вход 14 задания порога.
Блок 5 определения ориентации контура (фиг.2) содержит первый 15 и вт второй 16 блоки постоянной памяти, блок 17 совпадения.
Дифференцирующий блок 4 (фиг.З) содержит первый 18 к второй 19 коммутаторы, первый 20, второй 21 и третий 22 сумматоры.
Адаптивный пространственный фильт работает следующим образом.
Отсчеты видеосигнала телевизионного изображения в виде параллельного двоичного восьмиразрядного кода поступают на вход блока 1, назначение которого - сформировать управляющую и решающую апертуры, т.е. обеспечить одновременное присутствие на выходах блока 1 текущего элемента X Р и его окрестности (фиг.4). Отсчеты, соответствующие управляющей апертуре, по- 50 десять сигналов логической маски,соступают на вход анализатора 2. Часть ответствующие зонам Д 1 для первого
блока 15 и соответствующие зонам Л i второго блока 16 (фиг.5). Первая из четырех зон имеет на адресных вхо- 55 дах значения элементов логической маски, соответствующие зоне Л., для ориентации 0-180(элементы У6, У10 У24,У1,У23,У8,У22,У7, У21. и У20) Если восемь из десяти элементов
отсчетов, соответствующая решающей апертуре, поступает на вход дифференцирующего блока 4. Работа блока 1 синхронизируется последовательностью С,, поступающей на первый синхронизирующих вход 6 и представляющей собой меандр с частотой дискретизации, формируемой общим синхрогенератором телевизионной системы,в состав которой входит предлагаемый фильтр.
Анализатор 2 фрагмента изображения в блоке 8 вычисляет среднюю яркость в пределах управляющей апертуры. Блок 8 может быть реализован на базе сумматоров, выполняющих попарно-последовательное суммирование
0 сигналов 24-х элементов управляющей апертуры.
Анализатор 2 формирует две логических маски, первая из которых представляют совокупность единиц для от5 счетов апертуры, величина которых больше уровня средней яркости на величину устанавливаемого на входе 14 порога и совокупность нулей для остальных отсчетов. Вторая маска пред0 ставляет собой совокупность единиц для отсчетов апертуры, величина ко- )торых меньше уровня средней яркости на величину и совокупность нулей для остальных отсчетов.
5 Вычислительный блок 9 определяет модуль разности и между отсчетами апертуры и средней яркостью и знаки этих разностей. Компаратор 10 сравнивает величины и с порогом, уста0 позленным на входе 14, а на его выходах появляются значение 1 для тех отсчетов, значение и которых превышает величину порога. Выходные сигналы компаратора 10 подаются на
входы первого 12 и второго 13 блоков элементов И, на другие входы которых подается в противофазе сигнал знака и, с выхода вычислительного блока 9. Таким образом, на выходе второго блока 13 появляется сигнал первой логической маски, на выходе второго блока 12 - сигнал второй логической маски.
Сигналы первой и второй логиче- 5 ских масок поступают на входы соответственно первого 15 и второго 16 блоков постоянной памяти, каждый из которых содержит четыре зоны,на входы каждой из которых поступают
0
этой зоны имеют значение 1, то на выходе первой зоны будет значение О..Если условие 8 из 10 не выполняется, то на выходе зоны будет 1 . Вторая зона имеет на адресных входах значения элементов логической маски, соответствующие зоне Д, но с ориентацией 45-225°,третья - 90-180° и т.д. Таким образом, в зависимости от ориентации контура на выходе первого блока 15 будет комбинация в виде четырехразрядного кода, причем ориентации 0-180° соответствует комбинация 0001, ориентации 45-225° 0010, ориентации 90-270° - 0100 ориентации 135-315 - 1000. Работа второго блока 16 аналогична работе первого блока 15,но для зон Д2. Условие 8-из 10 выбрано по результатам эксперимента по выделению контуров малоконтрастных изображений. Если условие не менее чем 8 из 10 ни в одной зоне не выполняется или блок 17 совпадения получает разные сигналы на входах, то принимается решение об отсутствии контура в данной апертуре, что отражается комбинацией 1111 на выходе блока 17. Его выход является управляющим для первого 18 и второго 19 коммутаторов дифференцирующего блока 4. На блок 17 совпадения подается сигнал синхронизации С,, который разрешает выдачу сигнала управления только во время второй половины интервала .дискретизации, т.е. после окончания переходных процессов в анализаторе 2 и блоке 5.
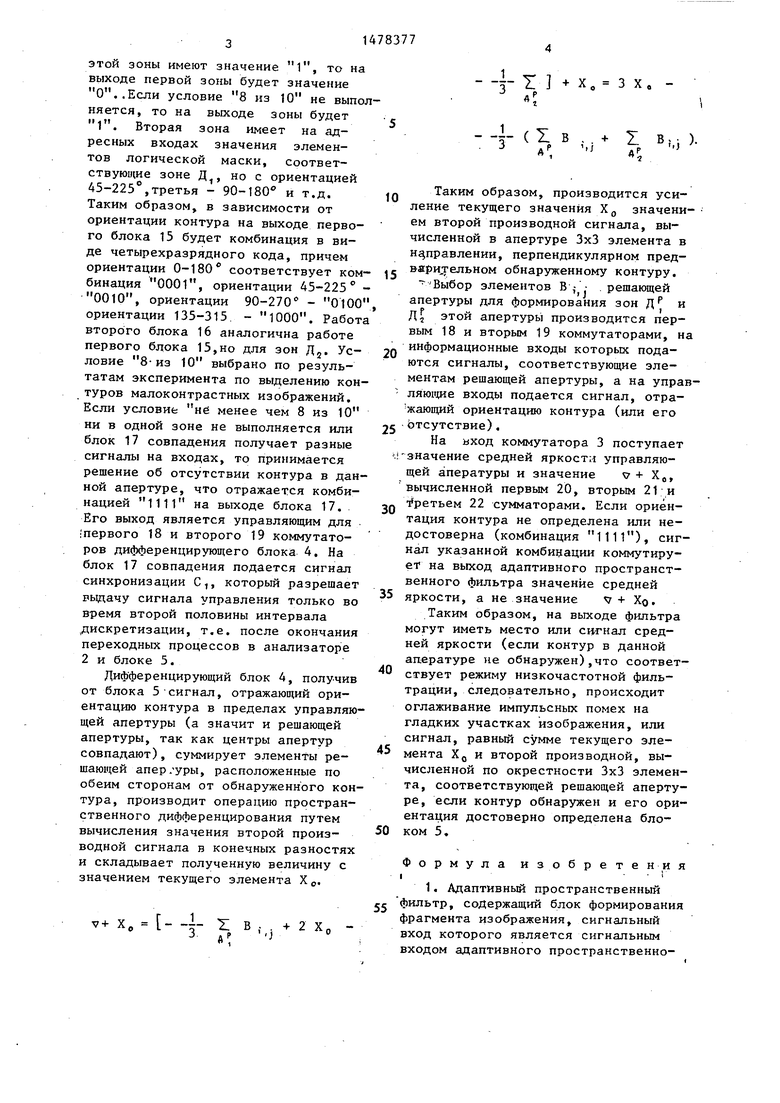
Дифференцирующий блок 4, получив от блока 5 сигнал, отражающий ориентацию контура в пределах управляющей апертуры (а значит и решающей апертуры, так как центры апертур совпадают), суммирует элементы решающей апер. уры, расположенные по обеим сторонам от обнаруженного контура, производит операцию пространственного дифференцирования путем вычисления значения второй производной сигнала в конечных разностях и складывает полученную величину с значением текущего элемента Х0.
v+ X,
:
+ 2 X,
- 4- Т + х0 з х
--f Ј,,, Г в,,).
0
5
0
5
0
5
0
5
0
5
Таким образом, производится усиление текущего значения Х0 значением второй производной сигнала, вычисленной в апертуре 3x3 элемента в направлении, перпендикулярном предварительном обнаруженному контуру. Выбор элементов В,- решающей апертуры для формирования зон Др и дЈ этой апертуры производится первым 18 и вторым 19 коммутаторами, на информационные входы которых подаются сигналы, соответствующие элементам решающей апертуры, а на управляющие входы подается сигнал, отражающий ориентацию контура (или его отсутствие).
На вход коммутатора 3 поступает -значение средней яркостл управляющей апературы и значение к + Х0, вычисленной первым 20, вторым 21 и третьем 22 сумматорами. Если ориентация контура не определена или недостоверна (комбинация 1111), сигнал указанной комбинации коммутирует на выход адаптивного пространственного фильтра значение средней яркости, а не значение v+ XQ.
Таким образом, на выходе фильтра могут иметь место или сигнал средней яркости (если контур в данной аиературе не обнаружен),что соответствует режиму низкочастотной фильтрации, следовательно, происходит сглаживание импульсных помех на гладких участках изображения, или сигнал, равный сумме текущего элемента Х0 и второй производной, вычисленной по окрестности 3x3 элемента, соответствующей решающей апертуре, если контур обнаружен и его ориентация достоверно определена блоком 5.
Формула изобретения i
фильтр, содержащий блок формирования фрагмента изображения, сигнальный вход которого является сигнальным входом адаптивного пространственного фильтра, анализатор фрагмента изображения и коммутатор, отличающийся тем, что, с целью повышения точности фильтрации, введены блок определения ориентации контура, первый и второй сигнальные входы которого соединены соответственно с первым и вторым выходами анализатора фрагмента изображения, а синхронизирующий вход объединен с синхронизирующим входом блока формирования фрагмента изображения и является первым синхронизирующим входом адаптивного пространственного фильтра, ,а также дифференцирующий блок, первый сигнальный вход которого объединен с первым входом коммутатора и соединен с выходом блока определения ориентации, второй сигнальный вход соединен с первым выходом блока формирования фрагмента изображения, третий сигнальный вход объединен с первым входом анализатора фрагмента изо- изображения и соединен с вторым выходом блока формирования фрагмента изображения, синхронизирующий вход является вторым синхронизирующим входом адаптивного пространственного фильтра, а выход соединен с вторым входом коммутатора, третий вход которого соединен с третьим выходом анализатора фрагмента изображения, а выход является выходом адаптивного пространственного фильтра, при этом второй вход анализатора фрагмента изображения соединен с третьим выходом блока формирования фрагмента изображения .
2, Устройство по п.1, отличающееся тем, что анализатор фрагмента изображения выполнен в виде последовательно соединенных блока определения средней яркости, вычислительного блока, первый и второй входы которого объединены соответственно с первым и вторым входами блока определения средней яркости и являются первым и вторым входами анализатора фрагмента изображения, элемента НЕ и первого элемента И, выход которого является первым выходом анализатора фрагмента изображе
5
0
ния, компаратора, первый вход которого соединен -с вторым выходом вычислительного блока, а второй вход является входом задания порога и второго элемента И, первый вход которого соединен с первым выходом вычислительного блока, второй вход объединен с вторым входом первого элемента И и соединен с выходом компаратора, а выход является вторым выходом анализатора фрагмента изображения, третьим выходом которого является выход блока определения средней яркости.
5 сигнальным входом дифференцирующего блока, а управляющий вход объединен с управляющим входом первого коммутатора и является первым сигнальным входом дифференцирующего блока, и третий сумматор, выход которого соединен с третьим сигнальным входом второго сумматора.
0
0
0
Фаг.з
Фиг А
А,
К
ггу
л
г Фиг.5
135
| Адаптивное устройство для выделения сигнала контура изображения | 1984 |
|
SU1203717A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
