1
Изобретение относится к горной промышленности и может быть использовано для строительства водонепроницаемых завес различного назначения.
Цель изобретения - расширение эксплуатационных возможностей за
счет обеспечения увеличения глубины траншей.
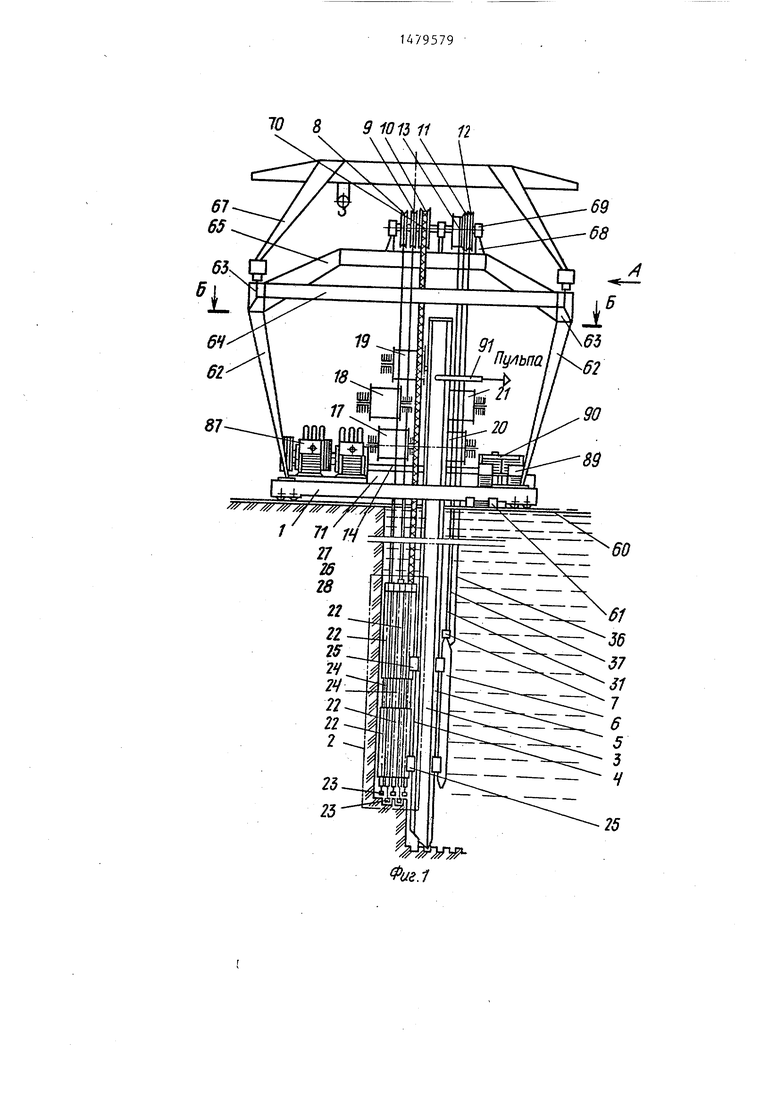
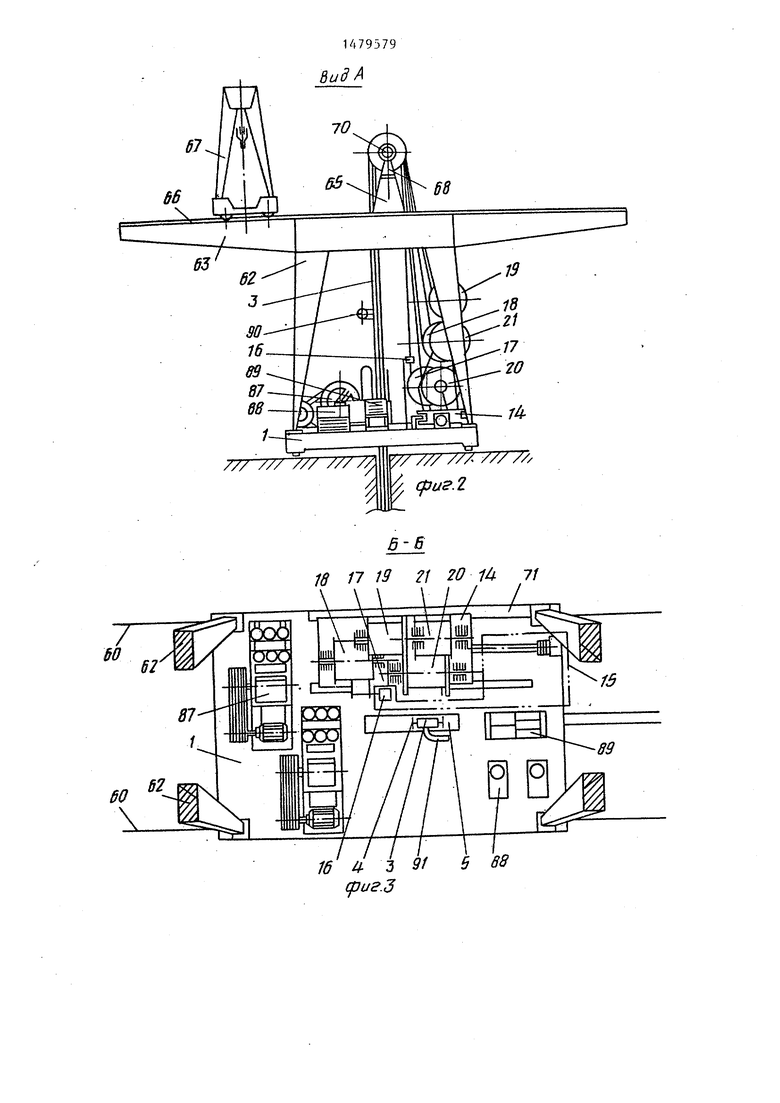
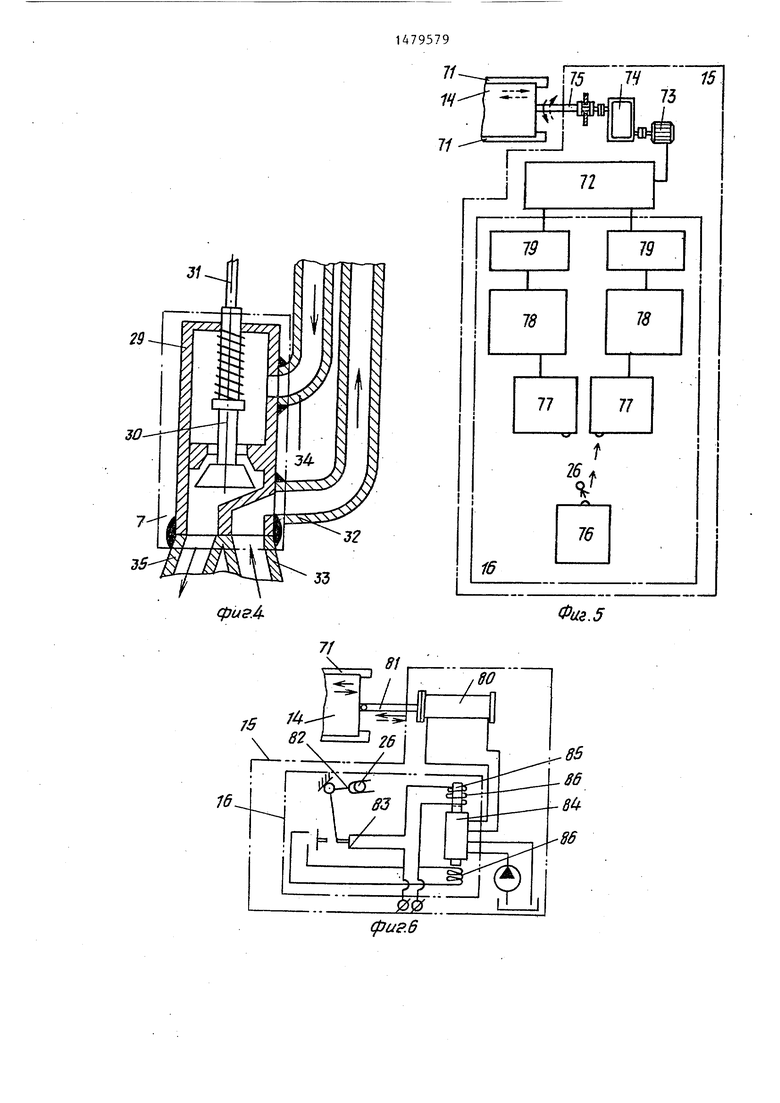
На фиг.1 изображен общий вид устройства; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Н на фиг.1; на фиг.4 - синхронизатор положения рабочего органа, продольный разрез; на фиг.5 - схема фотоэлектрического следящего привода; на фиг.6 - схема механо-электро-гидравлического следящего привода; на фиг.7 - распорный механизм; на фиг.8 - вид В на фиг.7; на фиг.9 - распорный механизм (вариант); на фиг.10 - вид Г на фиг.9.
Устройство для проходки траншей (фиг.1-3) включает передвижную базовую машину 1 с ходовой частью, по- родоразрушающий рабочий орган 2, эр- лифтную трубу 3 с направляющими 4 и 5, распорный механизм 6 с приводом его перемещения (не обозначен) и с синхронизатором 7 положения рабочего органа, направляющие блоки (ролики) 8-12, барабан 13 и каретку 14 со следящим приводом 15, датчик девиации 16 и барабаны лебедок 17-21.
Рабочий орган 2 включает электробуры 22 с шарошечными долотами 23, утяжелителями 24 и салазками 25, размещенными на направляющей 4. С барабанами лебедок 17-19 рабочий орган 2 связан через направляющие блоки 8-10 подъемным канатом 26, кабелем электропитания 27 и промывочным рукавом 28. I
Синхронизатор 7 (фиг.4) включает
корпус 29 с размещенным в нем подпружиненным переключателем (золотником) 30 привода перемещения распорного механизма, который связан с канатом 31, навитым на барабан 13. Синхронизатор 7 размещен в верхней части распорного механизма и имеет сливные патрубки 32 и 33 и напорные подводящие патрубки 34 и 35. Патрубки 32 и 33 соединены со сливным рукавом 36, а патрубки 33 и 34 - с напорным рукавом 37. Рукава 36 и 37 перекинуты через ролики 11 и 12 и соединены с барабанами лебедок 20 и 21. Посредством рукавов 36 и 37 синхронизатор гидравлически сообщен с энергоносителем (гидромагистралью) расположенным дистанционно (на поверхности) .
Распорный механизм 6 (фиг.7 и 8) может быть выполнен гусеничным и включает две гусеницы 38, размещенные на роликах 39, расположенных на рамках 40, связанных между собой посредством выдвижных штоков 41 гидроцилиндров распора 42. Внутри рам 40 на пальцах 43 размещены ходовые цилиндры 44, подпружиненные (пружины
,
10
20
25
479579
не показаны) штоки 45 которых контактируют с гусеницами 38. Гидроцилиндры 42 связаны между собой ребром 46, которое крепится к салазкам 47, размещенным на направляющих 5 эрлифт- ной трубы 3. В верхней части ребра 46 установлен синхронизатор 7, гидравлически связанный через гидрораспределитель (не показано) с гидроцилиндрами 42 и 44.
Распорный механизм 6 может быть выполнен шагающим (фиг.9 и 10). Он включает две пары льне - верхних 48 15 и нижних 49, две пары гидроцилиндров - верхних 50 и нижних 51 с выдвижными штоками соответственно 52 и 53. Пара верхних гидроцилиндров 50 объединена ребром 54, к которому крепятся салазки 55. Гидроцилиндры 51 объединены ребром 56, к которому прикреплены салазки 57. Верхнее 54 и нижнее 56 ребра посредством выдвижных штоков 58 соединены гидроцилиндром 59. К верхней части ребра 54 крепится синхронизатор 7, гидравлически связанный через гидрораспределитель (не показан) с гидроцилиндрами распора 50 и 51 и гидроцилиндром перемещения 59. Салазки 55 и 57 размещены на направляющей 5 эрлифтной трубы 3.
Базовая машина 1 размещена на рельсах 60 и снабжена механизмом ее 35 перемещения 61. По углам базовой машины 1 установлены стойки 62, попарно объединенные ригелями 63. По концам ригели 63 связаны балками 64, а посредине - порталом 65. На ригелях 63 уложены пути 66, на которых размещен монтажный портальный кран 67. На портале. 65, на стойках 68, крепятся подшипники 69, в которых размещен вал 70. На валу 70 жестко закреплены направляющий ролик 9 подъемного канала 26 рабочего органа 2, ролик 8 кабеля 27, ролик 10 промывочного рукава 28, барабан 13 каната 31 синхронизатора 7, ролик 11 напорного рукава 37 и ролик 12 сливного рукава 36. Базовая машина 1 снабжена расположенными в продольном направлении направляющими 71, в кото- рых размещена каретка 14, на которой установлены барабан лебедки 17 для навивки каната 26 подъема рабочего органа 2, барабан лебедки 18 кабеля электропитания 27, барабан лебедки 19 промывочного рукава 28, барабан
30
40
45
50
55
лебедки 20 напорного рукава 37 и барабан лебедки 21 сливного рукава 36. Для перемещения каретки 14 в продольном направлении базовая машина 1 снабжена следящим приводом 15с датчиком девиации 16, контактирующим с канатом 26 подъема рабочего органа 2.
Следящий привод 15 может быть фотоэлектрическим (фиг.5) и включает реверсивный контактор 72, реверсивный электродвигатель 73, редуктор 74 и ходовой винт 75, контактирующий с гайкой (не показана), связанный с кареткой 14, и датчик девиации 16, контактирующий с канатом 26. Датчик девиации 16 включает источник света 76, два светоприемника 77, две логические ячейки НЕ 78 и два усилителя 79, управляющие контактором 72.
Следящий привод 15 механо-электро гидравлический (фиг.6) включает гидроцилиндр 80 со штоком 81, связанным с кареткой 14, и датчик девиации 16, связанный с канатом 26 подъема рабочего органа 2. Датчик девиации
16включает поворотную вилку 82, две пары контактов 83 и гидрораспределитель 84 с якорем 85 и двумя электромагнитами 86.
Подачу в электробуры жидкости обеспечивает насос 87. Энергоноситель для работы механизма 6 выполнен в виде маслостанции 88, расположен- ной на поверхности.
Компрессор 89 подает сжатый воздух для работы эрлифта, а пульпа выходит из эрлифтной трубы наружу по ее патрубку 90.
Устройство для проходки траншей работает следующим образом.
После подвески рабочего органа 2 посредством каната 26 и направляющего блока 9 (эрлифтную тр.убу 3 и распорный механизм 6 при проходке первой заходки не монтируют, салазки 25 на рабочий орган 2 не устанавливают) включают электробуры 22, приводящие во вращение шарошечные долота 23. К электробурам посредством насосов 87 по рукаву 28 подают глинистый раствор, заполняющий в процессе проходки траншею для обеспечения ее устойчивости. Посредством барабана лебедки
17постепенно отпускают канат 26, и рабочий орган 2 начинает проходку. Первая заходка проходится с прямой
.промывкой. По окончании первой про-
47957е 6
ходки рабочий орган 2 поднимают наверх, базовую машину 1 посредством механизма перемещения 61 сдвигают на величину заходки, а в пройденном первом участке щели посредством крана 67 монтируют эрлифтную трубу 3. Посредством салазок 25 на направляющей 4 устанавливают рабочий орган 10 2, на направляющей 5 устанавливают распорный механизм 6. Затем включаются электробуры 22, насосы 87, масло- станцию 88, копрессор 89, подающий сжатый воздух в эрлифтную трубу 3. 15 По мере проходки рабочий орган 2 погружается, при этом вращение посредством каната 26 направляющего ролика 9 вызывает ослабление навитого на барабан 13 каната 31. При ослаб- 20 лении каната 31 пружина перемещает вниз золотник 30, открывая подачу напорного масла к распорному механизму 6, вызывая его перемещение вниз. При этом, канат 31 опять на- 25 тягивается, золотник 30 закрывается и перемещение распорного механизма
6прекращается. Пульпа в процессе проходки удаляется через эрлифтную
трубу и патрубок 90. i 30 Гусеничный распорный механизм 6
работает следующим образом (фиг.7 и 8). При подаче напорного масла через синхронизатор 7 к распределителю (не показан), оно подается в цент35 ральную полость гидроцилиндров 42, вызывает выдвижение штоков 41 и прижатие роликов 39, а следовательно, и гусениц 38 к стенкам траншеи. Затем масло поступает в нижние полости
40 цилиндров 44. Штоки 45, выдвигаясь, отталкиваются от гусениц 38, перемещают рамы 40 и, следовательно, весь механизм вниз. После выдвижения штоков 45 на полную длину, подача масла
45 переключается в верхние полости цилиндров 44. Штоки 45 возвращаются в исходное положение и перемещение механизма 6 продолжается до тех пор, пока натяжение каната 31 не прекра50 тит подачу масла от синхронизатора
7к механизму 6. При выключении маслостанции 88 пружины, размещенные в гидроцилиндрах 42 (не показаны), вдвигают штоки 41 внутрь цилиндров
55 42, и механизм 6 может быть легко извлечен из траншеи с помощью каната 31 .
Шагающий распорный механизм 6 работает следующим образом При подаче напорного масла через синхронизатор 7 к распределителю (не показан) оно поступает в средние полости цилиндров 50, вызывая выдвижение што- ков 52 и распирание верхних лыж 48 в стенки траншеи. После этого масло поступает в среднюю полость гидроцилиндра 59. Штоки 58 выдвигаются и перемещают находящиеся в сложен- ном положении нижние лыжи 49 вниз. Затем масло поступает в средние полости цилиндров 51, штоки 53 выдвигаются и распирают лыжи 49 в стенки траншеи. После этого масло подают в крайние полости цилиндров 50 и штоки 52, вдвигаясь, складывают лыжи 48. Далее масло подается в крайние полости цилиндра 59, штоки 58 вдвигаются и перемещают лыжи 48 вниз. После это- го цикл повторяется до тех пор, пока натяжение каната 31 не перекроет подачу масла к механизму 6. При выключении маслостанции 88 пружины, находящиеся в цилиндрах 50 и 51 (не показаны) вдвигают штоки 52 и 53, лыжи 48 и 49 складываются и механизм 6 посредством каната 31 может быть извлечен из траншеи,,
По мере опускания рабочего органа 2 в траншею происходит сматывание каната 26 с барабана лебедки 17, возникает и увеличивается девиация каната 26. В результате этого срабатывает датчик девиации 16 и следящий привод 15 начинает перемещать карет- ку 14 в направляющих 71 в сторину, движение в которую уменьшает девиацию каната 26. По достижении значения девиации близкого к нулю - перемещение каретки 14 прекращается.
Фото-электрический (фиг.5) следящий i ривод 15 работает следующим образок.
При смещении (девиации) каната 26 например, влево (относительно датчика 16), он перекрывает световой поток от источника света 76 к левому светоприемнику 77. Срабатывает левая логическая ячейка НЕ 78, сигнал уси- ливается левым усилителем 79 и поступает к контактору 72, который включает вращение двигателя 73 в сторону обеспечивающую перемещение каретки 14 вправо до тех пор, пока оба свето приемника 77 не окажутся освещенными После этого контактор 72 отключается двигатель 73 перестает вращаться и перемещение каретки 14 прекращается.
5 g -
0
Аналогично, при отклонении каната 26 вправо, датчик 16 обеспечивает перемещение каретки 14 влево.
Механо-электро-гидравлический следящий привод 15 работает следующим образом.
Смещение (девиация) каната 26 вызывает угловое перемещение поворотной вилки 82, которая замыкает контакты 83, срабатывает один из электромагнитов 86, вызывающий пе- ремещение якоря 85, связанного с гидрораспределителем 84. Напорное масло поступает в ту из полостей гидроцилиндра 80, которая обеспечивает перемещение штока 81 и связанной с ним каретки 14 в направлении, уменьшающем девиацию каната 26. По достижении девиацией значения, близкого к нулю, контакта 83 размыкаются, гидрораспределитель 84 отключается, подача масла в гидроцилиндр 80 прекращается и каретка 14 останавливается.
Далее проходку траншеи продолжают описанным выше способом. Формула изобретения
Устройство для проходки траншей, включающее передвижную базовую машину, рабочий орган, подвешенный на подъемном канате через блок к лебед- . ке, эрлифтную трубу, закрепленную на базовой машине, и распорный механизм, подвешенный на канате к барабану, отличающееся тем, что, с целью расширения эксплуатационных возможностей за счет обеспечения увеличения глубины траншей, рабочий орган и распорный механизм установлены на эрлифтной трубе с возможностью осевого перемещения, блрд подъемного каната жестко соединен с барабаном, при этом устройство снабжено кареткой со следящим приводом ее перемещения, установленной на базовой машине, датчиком девиации подъемного каната, установленным на каретке с возможностью взаимодействия со следящим приводом, приводом перемещения распорного механизм а и синхронизатором положения рабочего органа с подпружиненным переключателем привода перемещения распорного механизма, размещенном на верхнем конце распорного механизма и скрепленном с канатом этого механизма, а лебедка подъемного каната размещена на каретке.
10 8 9 1013 11 П



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для буренияНЕглубОКиХ СКВАжиН пРяМОугОль-НОгО СЕчЕНия | 1977 |
|
SU821654A1 |
| Устройство для проходки в грунтах узких глубоких траншей | 1987 |
|
SU1535967A1 |
| Передвижная опалубка | 1988 |
|
SU1661430A1 |
| Струговая установка для образования траншей | 1984 |
|
SU1240892A1 |
| Устройство для образования траншей | 1984 |
|
SU1189953A1 |
| Устройство для проходки траншей | 1981 |
|
SU996651A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ТРАНШЕЙ | 1967 |
|
SU428060A1 |
| Устройство для погрузки породы при проходке горных выработок | 1989 |
|
SU1745973A1 |
| Бункерный ковш траншейного экскаватора | 1978 |
|
SU840243A1 |
| Устройство для проходки траншей | 1972 |
|
SU437826A1 |

Изобретение относится к горной пром-сти и может быть использовано для строительства водонепроницаемых завес различного назначения. Цель - расширение эксплуатационных возможностей за счет обеспечения увеличения глубины траншеи. Устройство включает рабочий орган (РО), эрлифтную трубу (ЭТ), закрепленную на передвижной базовой машине, распорный механизм (РМ) с приводом его перемещения и каретку, со следящим приводом ее перемещения. При этом РМ и РО размещены на ЭТ с возможностью осевого перемещения. Блок, посредством которого РО подвешен на подъемном канате, жестко соединен с барабаном, на котором посредством каната подвешен РМ. На каретке установлены лебедка подъемного каната и с возможностью взаимодействия со следящим приводом датчик девиации. Установка имеет синхронизатор положения РО с подпружиненным переключателем привода перемещения РМ, расположенным на верхнем конце РМ и скрепленным с канатом. Разрушаемая РО порода выносится на поверхность по ЭТ. При этом РО скользит по ЭТ вниз, в результате чего натяжение подъемного каната ослабляется и блок вращается совместно с барабаном. При повороте барабана натяжение его каната ослабляется и переключатель привода перемещения РМ направляет энергоноситель к РМ, вызывая его перемещение вниз. После этого канат натягивается, подача энергоносителя к РМ перекрывается и его перемещение прекращается. Так происходит шагающее погружение РО в траншею. При сматывании подъемного каната увеличивается его девиация. Следящий привод перемещает каретку в сторону уменьшения девиации этого каната. 10 ил.
25
25
ЈгпсЬ 5 t6 f ir 91
-A
T-n
IL 7l OZ U 61 LI 91
in
W
о
r1Л ON r
r
$ $ s $
N
fO 0
6 П Ьб
фивЗ
фиг. (О
| Авторское свидетельство СССР № 757651, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ТРАНШЕЙ | 1967 |
|
SU428060A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
