в
11479725
Изобретение относится к гидропневмоавтоматике и может быть.использовано в гидропневмо системах с управлением от оператора.,
Цель изобретения - повышение надежности путем создания тактильного эффекта.
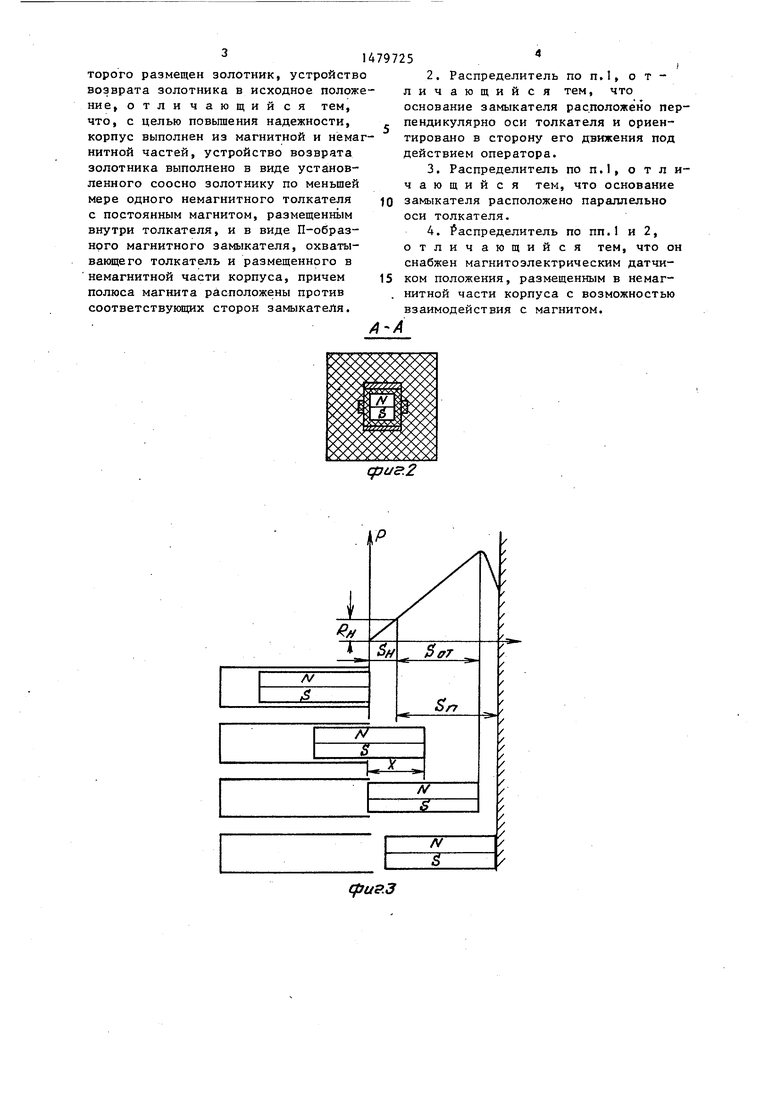
На фиг.1 изображена конструктивная схема (двухпозиционного) распре- ю делителя; на фиг.2 - сечение А-А на фиг.1; на фиг.З - зависимость усилия, создаваемого постоянным магнитом, от величины его перемещения вдоль замы2
ьым замыкателем 10 с силой РН . При подаче сигнала управления (приложение к золотнику 5 оператором толкающего усилия) золотник 5 перемещается вправо, вместе с ним перемещается вправо и толкатель 8, выталкивая магнит из П-обраэного замыкателя 10. По ходу золотника 5 возрастает усилие управления Р (фиг.З), так как увеличивается магнитная сила взаимодействия между магнитом 9 и замыкателем 10. После прохождения расстояния S(rr ,
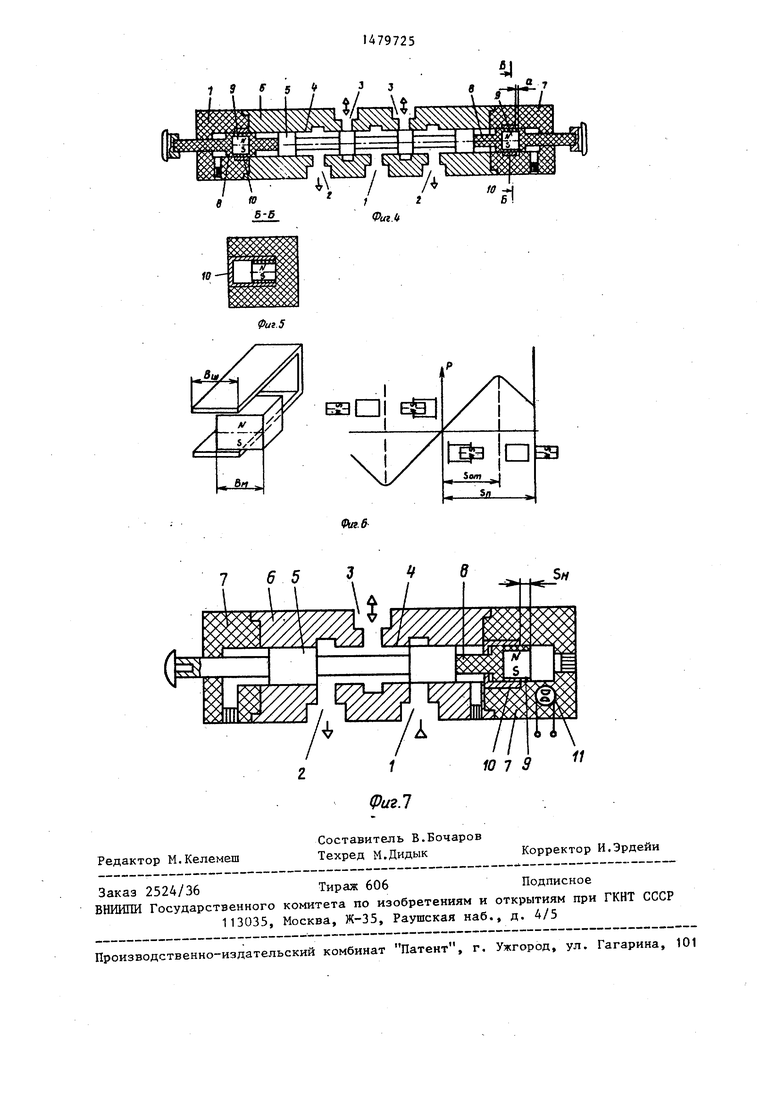
равного 0,7-0,85 полного хода эолоткателя; на фиг.4 изображена конструк-15 ника 5„, магнит 9 выходит из области тивная схема (трехпозиционного) распределителя; на фиг.5 - сечение Б-Б на фиг.4; на фиг.6 - зависимость усилия, создаваемого постоянным магнитом, от величины его перемещения для 20 трехпоэиционного распределителя; на фиг.7 - конструктивная схема распределителя с установленным датчиком положения золотника.
п
замыкателя 10, и начинается уменьшение силы взаимодействия магнита 9 и замыкателя 10. Оператор ощущает резкое уменьшение силы сопротивления смещению золотника 5 вправо (так на- зываемый провал усилия управления) перед тем, как золотник станет на упор.
Полученный таким образом тактильный эффект свидетельствует о том, что золотник 5 занял правое крайнее положение, при котором датчик 11 положения оказался в зоне действия магнитного поля магнита 9 и подает электрический сигнал о том, что золотник 5 находится в правом крайнем положении. Для обеспечения возврата золотника 5 в исходное положение необходимо, чтобы усилие, развиваемое магнитом 9 при достижении золотника 5 правого крайнего положения, было в 2-3,5 раза больше силы трения золотника. В исходном положении золотниРаспределитель содержит корпус с напорным 1, сливным 2 и рабочим 3 каналами, в цилиндрической расточке 4 которого размещен золотник 5. Корпус выполнен из магнитной 6 и немагнитной 7 частей. Распределитель содержит также устройство возврата золотника 5 в исходное положение, выполненное в виде установленного со- осно золотнику 5 по меньшей мере одного немагнитного толкателя 8 с постоянным магнитом 9, размещенным внутри толкателя 8, и в виде П-образного магнитного замыкателя 10, охватываю30
35
Полученный таким образом тактильный эффект свидетельствует о том, что золотник 5 занял правое крайнее положение, при котором датчик 11 положения оказался в зоне действия магнитного поля магнита 9 и подает электрический сигнал о том, что золотник 5 находится в правом крайнем положении. Для обеспечения возврата золотника 5 в исходное положение необходимо, чтобы усилие, развиваемое магнитом 9 при достижении золотника 5 правого крайнего положения, было в 2-3,5 раза больше силы трения золотника. В исходном положении золотника 5 усилие, развиваемое магнитом 9 щего толкатель 8 и размещенного в не-4Q За счет начального смещения SH отно- магнитной части корпуса 7, причем полюса магнита 9 расположены против соответствующих сторон замыкателя 10, а основание замыкателя расположено
45
перпендикулярно оси толкателя 8 и ориентировано в сторону движения под действием оператора (фиг.1) или параллельно оси толкателя 8 (фиг.4).
Распределитель снабжен магнитоэлектрическим датчиком положения 11, размещенным в немагнитной части 7 корпуса с возможностью взаимодействия с магнитом 9.
Распределитель работает следующим образом.
В исходном положении (фиг.1) постоянный магнит 9 за счет осевого смещения S4 притягивается размещенным в немагнитной части 7 корпуса П-обраэсительно замыкателя 10, и усилие от силы трения золотника 5 должны надежно удерживать золотник 5 в исходном положении.
50
55
Работа трехпозиционного распределителя происходит аналогично, за исключением того, что ширина Вм магнитов 9 (фиг.6) должна быть больше ширины Вы замыкателей 10 для исключения инерционного проскока золотником 5 нейтрального положения при снятии усилия управления.
Формула изобретения
1. Распределитель, содержащий корпус с напорным, сливным и рабочим каналами, в цилиндрической расточке ко2
ьым замыкателем 10 с силой РН . При подаче сигнала управления (приложение к золотнику 5 оператором толкающего усилия) золотник 5 перемещается вправо, вместе с ним перемещается вправо и толкатель 8, выталкивая магнит из П-обраэного замыкателя 10. По ходу золотника 5 возрастает усилие управления Р (фиг.З), так как увеличивается магнитная сила взаимодействия между магнитом 9 и замыкателем 10. После прохождения расстояния S(rr ,
равного 0,7-0,85 полного хода эолотника 5„, магнит 9 выходит из области
п
замыкателя 10, и начинается уменьшение силы взаимодействия магнита 9 и замыкателя 10. Оператор ощущает резкое уменьшение силы сопротивления смещению золотника 5 вправо (так на- зываемый провал усилия управления) перед тем, как золотник станет на упор.
Полученный таким образом тактильный эффект свидетельствует о том, что золотник 5 занял правое крайнее положение, при котором датчик 11 положения оказался в зоне действия магнитного поля магнита 9 и подает электрический сигнал о том, что золотник 5 находится в правом крайнем положении. Для обеспечения возврата золотника 5 в исходное положение необходимо, чтобы усилие, развиваемое магнитом 9 при достижении золотника 5 правого крайнего положения, было в 2-3,5 раза больше силы трения золотника. В исходном положении золотника 5 усилие, развиваемое магнитом 9 За счет начального смещения SH отно-
сительно замыкателя 10, и усилие от силы трения золотника 5 должны надежно удерживать золотник 5 в исходном положении.
Работа трехпозиционного распределителя происходит аналогично, за исключением того, что ширина Вм магнитов 9 (фиг.6) должна быть больше ширины Вы замыкателей 10 для исключения инерционного проскока золотником 5 нейтрального положения при снятии усилия управления.
Формула изобретения
1. Распределитель, содержащий корпус с напорным, сливным и рабочим каналами, в цилиндрической расточке коJ
торого размещен золотник, устройств возврата золотника в исходное положние, отличающийся тем, что, с целью повышения надежности, корпус выполнен из магнитной и неманитной частей, устройство возврата золотника выполнено в виде установленного соосно золотнику по меньшей мере одного немагнитного толкателя с постоянным магнитом, размещенным внутри толкателя, и в виде П-образ- ного магнитного замыкателя, охватывающего толкатель и размещенного в немагнитной части корпуса, причем полюса магнита расположены против соответствующих сторон замыкателя.
2.Распределитель по п.1, отличающийся тем, что основание замыкателя расположёно перпендикулярно оси толкателя и ориентировано в сторону его движения под действием оператора.
3.Распределитель по п.1, о т л и- чающийся тем, что основание замыкателя расположено параллельно оси толкателя.
4.Распределитель по пп.1 и 2, отличающийся тем, что он снабжен магнитоэлектрическим датчиком положения, размещенным в немагнитной части корпуса с возможностью взаимодействия с магнитом.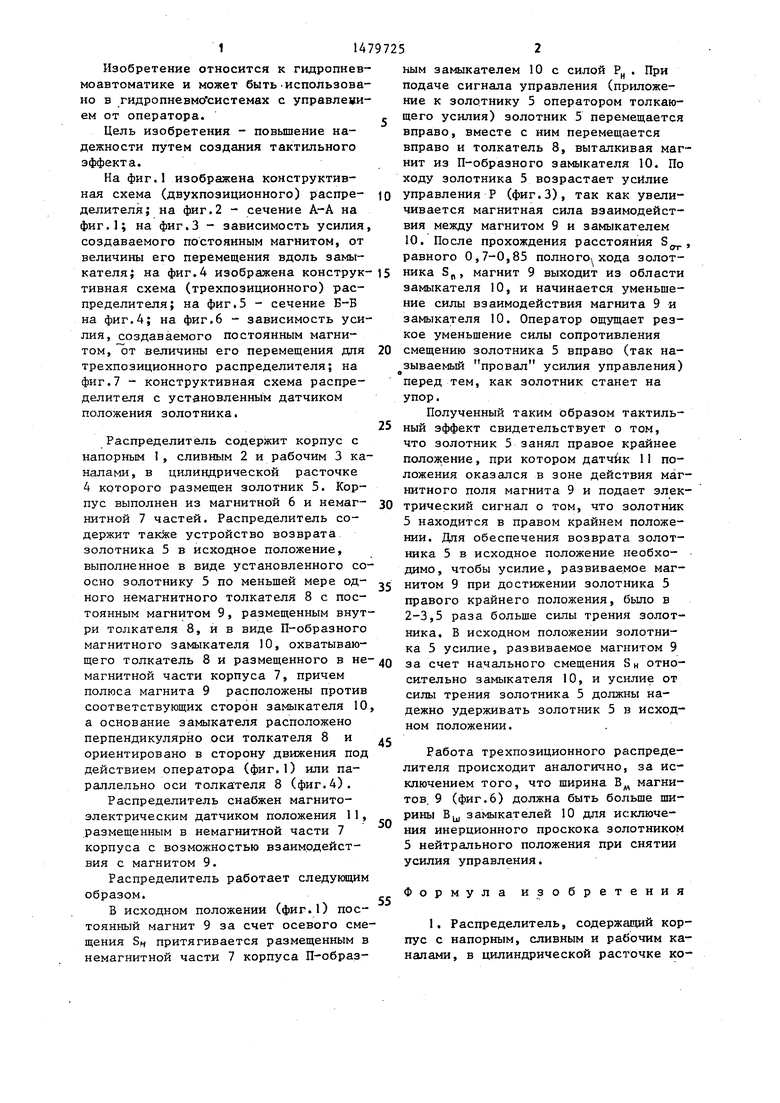
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпозиционный распределитель | 1987 |
|
SU1657775A1 |
| Двухпозиционный распределитель | 1987 |
|
SU1479724A1 |
| Двухкаскадный многосекционный гидравлический распределитель с электрическим управлением | 1988 |
|
SU1576743A1 |
| Распределитель | 1987 |
|
SU1479723A1 |
| Двухпозиционный распределитель | 1987 |
|
SU1657774A1 |
| Двухпозиционный распределитель | 1987 |
|
SU1483118A1 |
| Гидросистема бурильной установки | 1980 |
|
SU907234A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2199013C2 |
| Сенсорный клапан Овандера В.Б. | 1989 |
|
SU1721364A1 |
| ПРОПОРЦИОНАЛЬНЫЙ КЛАПАН УПРАВЛЕНИЯ ФРИКЦИОНАМИ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ | 2016 |
|
RU2624926C1 |
Изобретение относится к гидропневмоавтоматике и позволяет повысить надежность распределителей с ручным управлением путем создания тактильного эффекта. В цилиндрической расточке 4 корпуса, состоящего из магнитной части 6 и немагнитной части 7, размещен золотник 5 и толкатель 8 с магнитом 9. В немагнитной части 7 корпуса размещен П-образный замыкатель 10, охватывающий толкатель 8. При подаче сигнала управления золотник 5 и толкатель 8 перемещаются вправо. По ходу золотника возрастает усилие управления, т.к. увеличивается сила взаимодействия между магнитом 9 и замыкателем 10. После смещения золотника 5 на определенную величину усилие управления достигает максимального значения, после чего начинает уменьшаться и оператор ощущает "провал" усилия управления перед тем, как золотник станет на упор. Полученный таким образом тактиловый эффект свидетельствует о том, что золотник 5 занял правое крайнее положение. 3 з.п. ф-лы, 7 ил.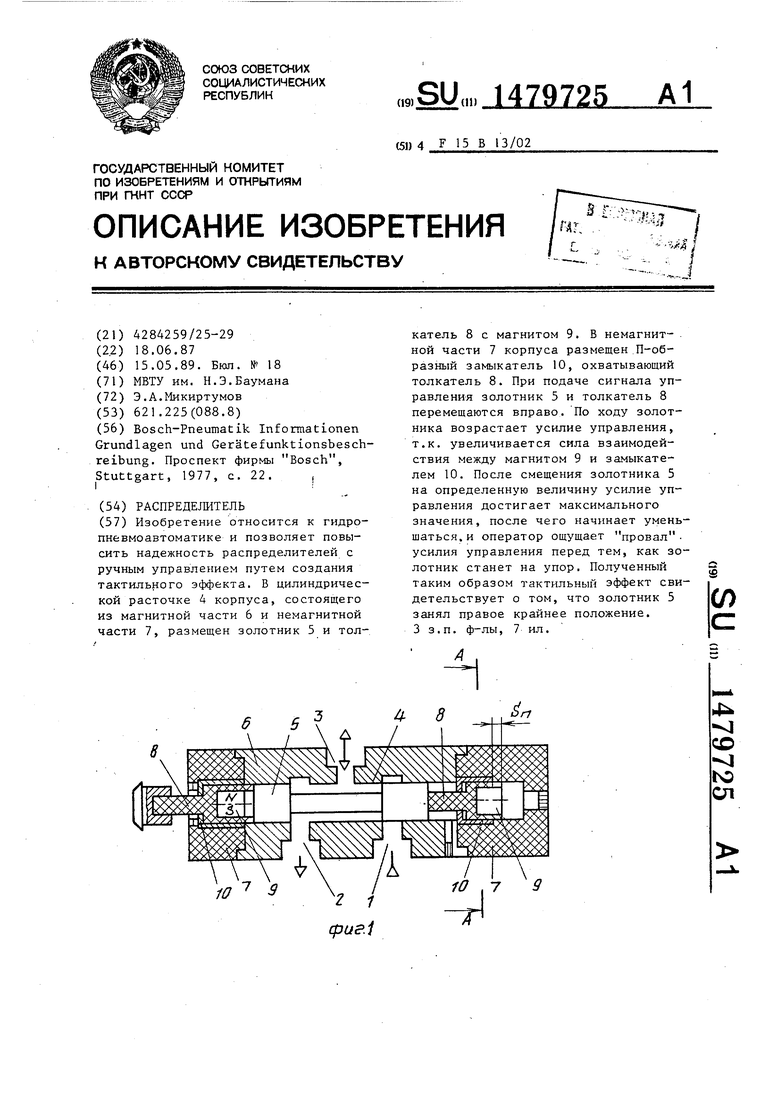
фи&З
сриг.2
б-б
Ю
10 fil
Ь
за
„ Sam
5д
s«
| Bosch-Pneumatik Informational Grundlagen und Geratefunktionsbesch- reibung | |||
| Проспект фирмы Bosch, Stuttgart, 1977, c | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| , | |||
