Фиг.1
Изобретение относится к гидропневмоавтоматике и может быть использовано в гидропневмосистемах с управлением от оператора.
Цель изобретения - повышение надежности и улучшение эксплуатационных качеств.
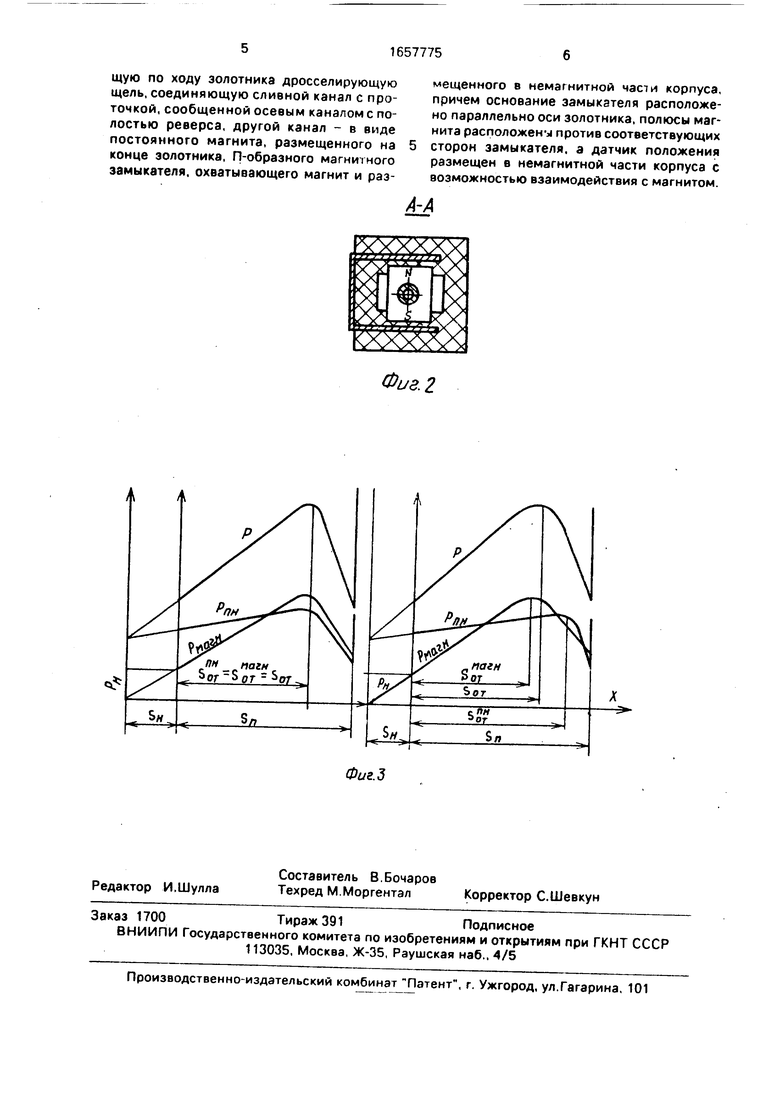
На фиг.1 изображена конструктивная схема распределителя; на фиг.2 - сечение А-А на фиг.1; на фиг.З - зависимость усилия, создаваемого постоянным магнитом от величины его перемещения вдоль замыкателя, и зависимость пневматической силы от хода золотника.
Двухпозиционный распределитель содержит корпус 1 с немагнитной частью 2, напорным 3, сливным 4, реверсирующим 5 и рабочим 6 каналами, в цилиндрической расточке 7 которого размещен двухпояско- вый золотник 8 с образованием полости 9 реверса. Распределитель снабжен двухка- нальным устройством реверса, один канал которого выполнен в виде регулируемого дросселя 10, установленного в реверсирующем канале 5, осевого канала 11 золотника 8, проточки 12 в одном из поясков золотника 8, образующей возрастающую по ходу золотника дросселирующую щель 13, соединяющую сливной канал 4 с проточкой 12, сообщенной осевым каналом 11 с полостью 9 реверса, другой канал выполнен в виде постоянного магнита 14, размещенного на конце золотника, П-образного магнитного замыкателя 15, охватывающего магнит 14 и размещенного в немагнитной части 2 корпуса, причем основание замыкателя 15 расположено параллельно оси золотника 8, а полюсы магнита 14 - против соответствующих сторон замыкателя. Распределитель снабжен магнитоэлектрическим датчиком 16 положения, размещенным в немагнитной части корпуса 2 с возможностью взаимодействия с магнитом 14.
Распределитель работает следующим образом.
В исходном - крайнем левом положении (фиг.1) золотник 8 удерживается за счет давления в полости 9 реверса, перекрытой дросселирующей щели 13, а также за счет того, что осевое смещение SH постоянного магнита 14 создает начальную магнитную силу Рн, достаточную для удержания золотника 8 в исходном положении. При этом рабочий канал 6 сообщен со сливным каналом 4 и разобщен с напорным каналом 3. При подаче сигнала управления (приложение оператом к золотнику 8 толкающего усилия) золотник 8 начинает перемещаться вправо, выталкивая магнит 14 из П-образного замыкателя 15. По ходу золотника 8 возрастает усилие управления Р (фиг.З), так как увеличивается сила, препятствующая смещению золотника 8. После смещения золотника 8 на величину SOT, равную 0,7-0,85
полного хода 5П золотника, начинается уменьшение давления в полости 9 реверса из-за открытия дросселирующей щели 13, а также магнит 14 выходит из области замыкателя 15 и начинается уменьшение силы
0 взаимодействия магнита 14 и замыкателя 15. Оператор ощущает уменьшение силы сопротивления смещению золотника 8 вправо, так называемый провал усилия управления перед тем, как золотник станет
5 на упор. По завершении полного хода золотника 8 формируется сигнал магнитоэлектрическим датчиком 16 положения.
Полученный таким образом тактильный эффект свидетельствует о том, золотник 8
0 занял правое крайнее положение, при котором датчик 16 положения оказался в зоне действия магнитного поля магнита 14 и подал электрический сигнал о том, что золотник 8 находится в правом крайнем поло5 жении. Оба пневматический и магнитный канала двухканального устройства реверса дублируют один другой. Для обеспечения возврата золотника 8 в исходное положение необходимо в случае выхода из строя пнев0 матического канала реверса, чтобы усилие, развиваемое магнитом 14 при достижении золотника 5 правого крайнего положения, было в 2,0-3,5 раза больше силы трения золотника, а удержание золотника 8 в исход5 ном положении обеспечивается суммой усилия, развиваемого магнитом 14 за счет начального смещения SH золотника 8 относительно замыкателя 15, и усилия от силы трения золотника 8. В случае выхода
0 из строя магнитного канала реверса возврат золотника 8 в исходное положение осуществляется за счет остаточного давления под торцом золотника в полости 9 реверса при смещении положения золотника 8.
5 Формула изобретения
Двухпозиционный распределитель, содержащий корпус с напорным, сливным, реверсирующим и рабочим каналами, в цилиндрической расточке которого разме0 щен двухпоясковый золотник с образованием полости реверса, отличающийся тем, что, с целью повышения надежности и улучшения эксплуатационных качеств, он снабжен магнитоэлектрическим датчиком
5 положения и двухканальным устройством реверса, один канал которого выполнен в виде регулируемого дросселя, установленного в реверсирующем канале, осевого канала золотника, проточки в одном из поясков золотника, образующей возрастающую по ходу золотника дросселирующую щель, соединяющую сливной канал с проточкой, сообщенной осевым каналом с полостью реверса, другой канал - в виде постоянного магнита, размещенного на конце золотника, П-образного магнитного замыкателя, охватывающего магнит и размещенного в немагнитной части корпуса, причем основание замыкателя расположено параллельно оси золотника, полюсы магнита расположена против соответствующих сторон замыкателя, а датчик положения размещен в немагнитной части корпуса с возможностью взаимодействия с магнитом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпозиционный распределитель | 1987 |
|
SU1657774A1 |
| Распределитель | 1987 |
|
SU1479725A1 |
| Гидропанель управления реверсом привода ползуна и приводом подач | 1974 |
|
SU566976A1 |
| Распределитель | 1987 |
|
SU1479723A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| Гидропанель управления реверсом привода ползуна | 1977 |
|
SU742630A1 |
| КЛАПАН ПЕРЕПУСКНОЙ С МАГНИТНОЙ ФИКСАЦИЕЙ И АВАРИЙНЫМ СБРОСОМ | 2006 |
|
RU2329427C1 |
| Гидравлическая система комбайна | 1989 |
|
SU1667692A2 |
| Устройство для управления проходческим щитом | 1989 |
|
SU1698447A1 |
Изобретение относится к гидроавтоматике, в частности к гидросистемам с управлением от оператора, и позволяет повысить надежность путем создания тактильного эффекта. Распределитель снабжен двухка- нальным устройством реверса, один канал которого выполнен в виде регулируемого дросселя 10, осевого канала 11 и проточки 12 золотника 8, а другой канал в виде посто1 8 /Z 7J 77 Ч янного магнита (ПМ) 14, размещенного на конце золотника 8, П-обрэзного магнитного замыкателя 15, охватывающего ПМ 14, причем основание замыкателя 15 расположено параллельно оси золотника 8, а полюсы ПМ 14 расположены против соответственных сторон замыкателя 15. При подаче сигнала управления золотник 8 начинает перемещаться, выталкивая ПМ 14 из замыкателя 15. По ходу золотника 8 возрастает усилие управления. После смещения золотника 8 на определенную величину начинается, во- первых, уменьшение давления в полости 9 реверса, во-вторых, ПМ 14 выходит из области замыкателя 15 и начинается уменьшение силы взаимодействия ПМ 14 и замыкателя 15. Оператор ощущает уменьшение силы сопротивления смещения золотника 8 вправо, так называемый провал усилия управления перед тем, как золотник 8 станет на упор. 3 ил. 7 л 2.I5/J1 3 Щ//7 / И. /. А. 1ъ /V X /Ж/ J W с о ел VI VJ VI СП 16
$
л
TJ$
пи наги „ bor-bpf ьог.
S/,
Фиг. 2
SQT
гПН ЬОГ
Ч
5Я
| Bosch - Pneumatlk Informatlonen | |||
| Grundlagen und Geratefunk-Uousbeschreibung | |||
| Проспект фирмы Bosch, Stuttgart, 09.11, c | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
