1
Изобретение относится к трикотажному машиностроению и может быть использовано при изготовлении плоских перчаточных автоматов и плосковязальных машин и автоматов.
Цель изобретения - повышение надежности работы привода.
На фиг. 1 представлена кинематическая схема привода плосковязальной машины; на фиг. 2 - демпфирующее устройство привода; фиг. 3 - схема перехода промежуточной каретки с прямолинейного участка на криволинейный.
Привод (фиг. 1) состоит из электродвигателя 1, на валу которого закреплен шкив 2 клиноременной передачи, редуктора 3 с клиноременной передачей 4, цепной передачи, включающей ведущую 5 и ведомую 6 звездочки и цепь 7. К цепи крепится палец 8, со единяющий цепь с промежуточной кареткой 9, установленной на направляющей 10. Промежуточная каретка соединена. с вязальной кареткой 11, установленной на направляющих 12. В направляющей 10 расположен упругий элемент 13 с серьгой 14, завинченной в стержень 15, имеющий выступающий за пределы направляющей штифт 16. Такой же штифт крепится к левому концу упругого элемента. Оба штифта служат упорам для ограничения, движения промежуточной кареткиа
ОО
ЬтадЬ.
314
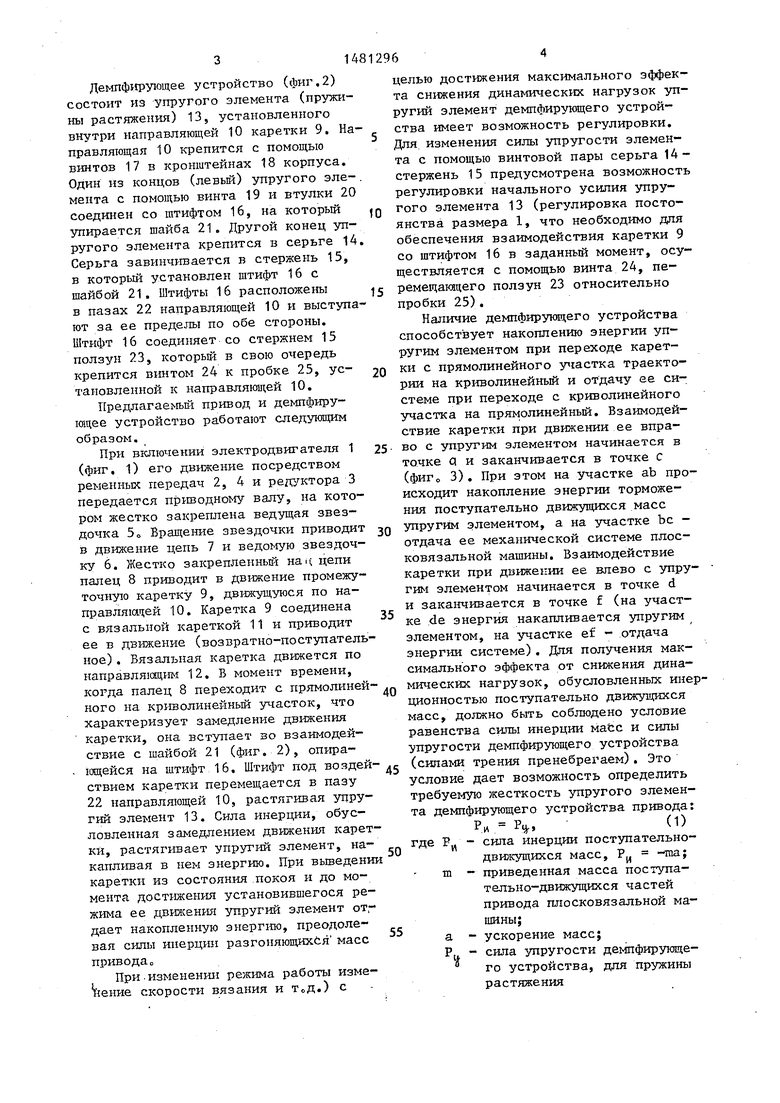
Демпфирующее устройство (фиг,2) состоит из упругого элемента (пружины растяжения) 13, установленного внутри направляющей 10 каретки 9. Направляющая 10 крепится с помощью винтов 17 в кронштейнах 18 корпуса. Один из концов (левьй) упругого элемента с помощью винта 19 и втулки 20 соединен со штифтом 16, на который упирается шайба 21. Другой конец упругого элемента крепится в серьге 14 Серьга завинчивается в стержень 15, в который установлен штифт 16 с шайбой 21. Штифты 16 расположены в пазах 22 направляющей 10 и выступают за ее пределы по обе стороны. Штифт 16 соединяет со стержнем 15 ползун 23, который в свою очередь крепится винтом 24 к пробке 25, ус- таповленной к направляющей 10.
Предлагаемый привод и демпфирующее устройство работают следующим образом.
При включении электродвигателя 1 (фиг. 1) его движение посредством
ременных передач 2, 4 и редуктора 3 передается приводному валу, на котором жестко закреплена ведущая звездочка 50 Вращение звездочки приводит в движение цепь 7 и ведомую звездочку 6. Жестко закрепленный на ч цепи палец 8 приводит в движение промежуточную каретку 9, движущуюся по направляющей Ю. Каретка 9 соединена с вязальной кареткой 11 и приводит ее в движение (возвратно-поступательное) . Вязальная каретка движется по направляющим 12, В момент времени,
0
5
0
5
целью достижения максимального эффекта снижения динамических нагрузок упругий элемент демпфирующего устройства имеет возможность регулировки. Для изменения силы упругости элемента с помощью винтовой пары серьга 14 - стержень 15 предусмотрена возможность регулировки начального усилия упругого элемента 13 (регулировка постоянства размера 1, что необходимо для обеспечения взаимодействия каретки 9 со штифтом 16 в заданный момент, осуществляется с помощью винта 24, перемещающего ползун 23 относительно пробки 25).
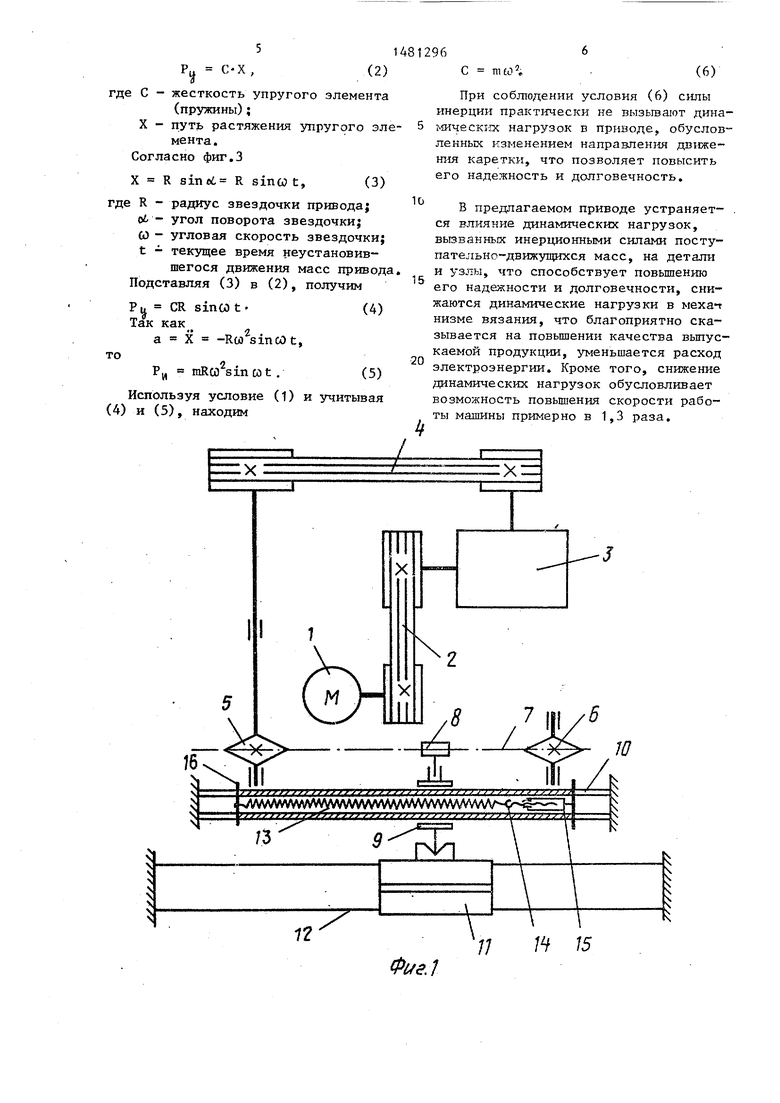
Наличие демпфирующего устройства способствует накоплению энергии упругим элементом при переходе каретки с прямолинейного участка траектории на криволинейный и отдачу ее системе при переходе с криволинейного участка на прямолинейный. Взаимодействие каретки при движении ее вправо с упругим элементом начинается в точке Q и заканчивается в точке с (фиг0 3) . При этом на участке ab происходит накопление энергии торможения поступательно движущихся масс упругим элементом, а на участке be - отдача ее механической системе плосковязальной машины. Взаимодействие каретки при движении ее влево с упругим элементом начинается в точке d и заканчивается в точке f (на участке de энергия накапливается упругим элементом, на участке ef - отдача энергии системе). Для получения максимального эффекта от снижения дина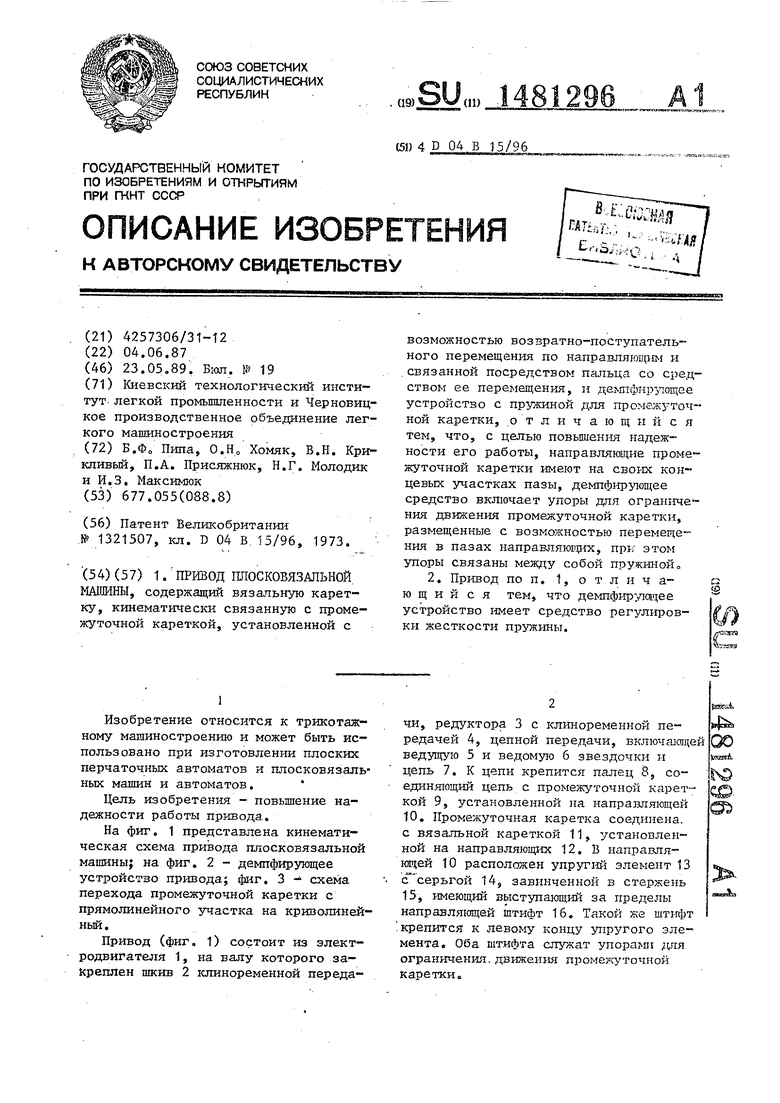
| название | год | авторы | номер документа |
|---|---|---|---|
| Плосковязальная машина | 1990 |
|
SU1730256A1 |
| Устройство для перемещения и переключения каретки плосковязального перчаточного автомата | 1986 |
|
SU1375700A1 |
| ДАТЧИК НАТЯЖЕНИЯ НИТИ С МНОГОКРАТНОЙ НАСТРОЙКОЙ, УСТРОЙСТВО ПОДАЧИ ЭЛАСТИЧНЫХ НИТЕЙ И СПОСОБ НАСТРОЙКИ ДАТЧИКА НАТЯЖЕНИЯ НИТИ | 1999 |
|
RU2154128C1 |
| ПРИВОД КАРЕТКИ ПЛОСКОВЯЗАЛЬНОЙ МАШИНЫ | 1993 |
|
RU2081220C1 |
| УСТРОЙСТВО ДЛЯ ОТТЯЖКИ ПЕТЕЛЬ НА ПЛОСКОВЯЗАЛЬНОЙ МАШИНЕ | 2005 |
|
RU2280721C1 |
| Механизм привода каретки плосковязальной машины | 1990 |
|
SU1730266A1 |
| МЕХАНИЗМ НИТЕПОДАЧИ ТРИКОТАЖНЫХ МАШИН | 2008 |
|
RU2371528C1 |
| ПЛОСКОВЯЗАЛЬНАЯ МАШИНА | 1992 |
|
RU2031997C1 |
| ПРИВОД КАРЕТКИ ПЛОСКОВЯЗАЛЬНОЙ МАШИНЫ | 2002 |
|
RU2198252C1 |
| Привод каретки плосковязальной машины | 1990 |
|
SU1805149A1 |
Изобретение относится к трикотажному машиностроению и может быть использовано при изготовлении плоских перчаточных автоматов и плосковязальных машин и автоматов. Цель изобретения - повышение надежности работы привода. Сущность: направляющие промежуточной каретки имеют на своих концевых участках пазы, демпфирующее средство включает упоры для ограничения движения промежуточной каретки, размещенные с возможностью перемещения в пазах направляющих, при этом упоры связаны между собой пружиной. Демпфирующее устройство имеет средство регулировки жесткости пружины. 1 з.п. ф-лы, 3 ил.
когда палец 8 переходит с прямолиней- .„ мических нагрузок, обусловленных инерного на криволинейный участок, что характеризует замедление движения каретки, она вступает зо взаимодействие с шайбой 21 (фиг. 2), опирационностью поступательно движущихся масс, должно быть соблюдено условие равенства силы инерции масс и силы упругости демпфирующего устройства
ющейся на штифт 16. Штифт под, воздей- (силами трения пренебрегаем). Это
ствием каретки перемещается в пазу 22 направляющей 10, растягивая упругий элемент 13. Сила инерции, обусловленная замедлением движения каретки, растягивает упругий элемент, накапливая в нем энергию. При выведении каретки из состояния покоя и до момента достижения установившегося режима ее движения упругий элемент отг дает накопленную энергию, преодолевая силы инерции разгоняющихся масс привода„
При изменении режима работы изменение скорости вязания и тсд.) с
условие дает возможность определить требуемую жесткость упругого элемента демпфирующего устройства привода:
Р Р.
(1)
55
где РЙ - сила инерции поступательно- движущихся масс, РИ -та; приведенная масса поступательно-движущихся частей привода плосковязальной машины;
ускорение масс; сила упругости демпфирующего устройства, для пружины растяжения
m а Р,.
ционностью поступательно движущихся масс, должно быть соблюдено условие равенства силы инерции масс и силы упругости демпфирующего устройства
условие дает возможность определить требуемую жесткость упругого элемента демпфирующего устройства привода:
Р Р.
(1)
5
где РЙ - сила инерции поступательно- движущихся масс, РИ -та; приведенная масса поступательно-движущихся частей привода плосковязальной машины;
ускорение масс; сила упругости демпфирующего устройства, для пружины растяжения
m а Р,.
р Р
С-Х,
где С - жесткость упругого элемента
(пружины);
X - путь растяжения упругого элемента. Согласно фиг.З
X R sinct R sinco t,(3)
где R - радиус звездочки привода; оЈ - угол поворота звездочки; СО - угловая скорость звездочки; t - текущее время неустановившегося движения масс привода. Подставляя (3) в (2), получим
PU CR sinco t (4)
Так как
а X -RGO sinco t,
то
и
mRQ sin cot .
(4)
Используя условие (1) и учитывая и (5), находим
12
С пно2.(6)
При соблюдении условия (6) силы инерции практически не вызывают дина- 5 мических нагрузок в приводе, обусловленных изменением направления движения каретки, что позволяет повысить его надежность и долговечность.
.
10
15
20
В предлагаемом приводе устраняется влияние динамических нагрузок, вызванных инерционными силами посту- пательнг-движущихся масс, на детали и узлы, что способствует повышению его надежности и долговечности, снижаются динамические нагрузки в мехат низме вязания, что благоприятно сказывается на повышении качества выпускаемой продукции, уменьшается расход электроэнергии. Кроме того, снижение динамических нагрузок обусловливает возможность повышения скорости работы машины примерно в 1,3 раза.
Фиё.1
11
Щ 15
га j
/
Фиа.З
&/е.2
| Устройство для подачи полосового и ленточного материала в зону обработки | 1985 |
|
SU1321507A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
