Изобретение относится к области трикотажного машиностроения, в частности, к приводам каретки плосковязальных машин.
Цель изобретения - упрощение конструкции привода и повышение надежности его работы.
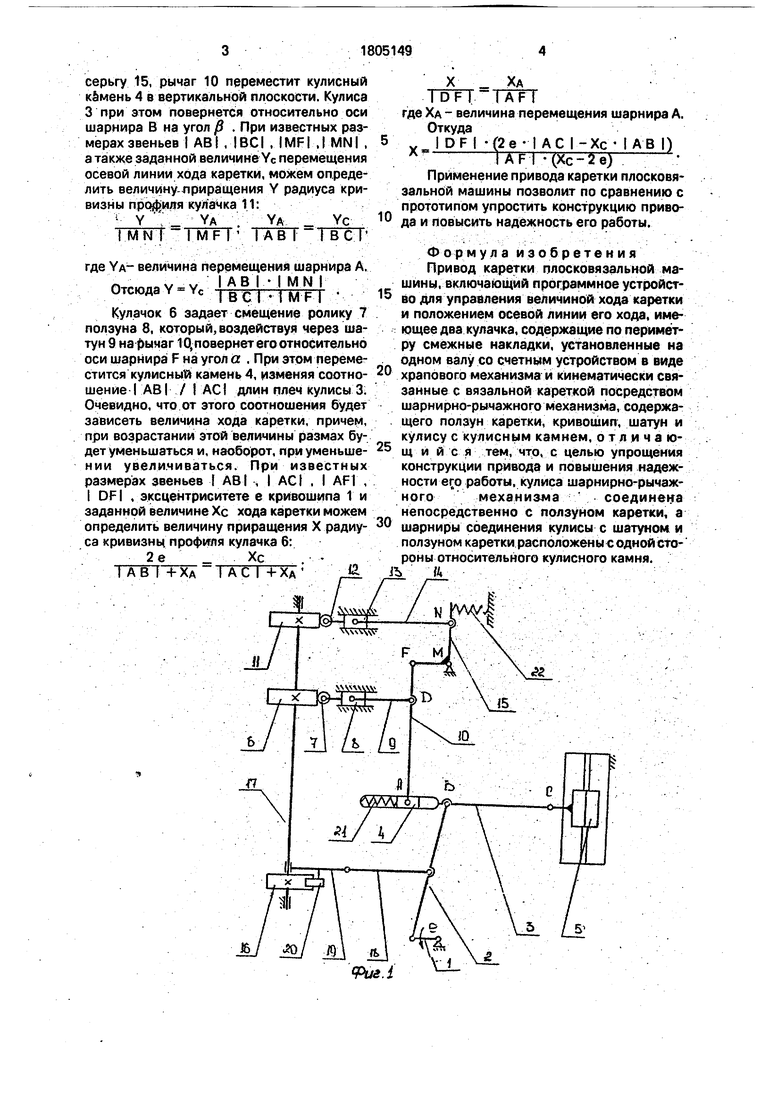
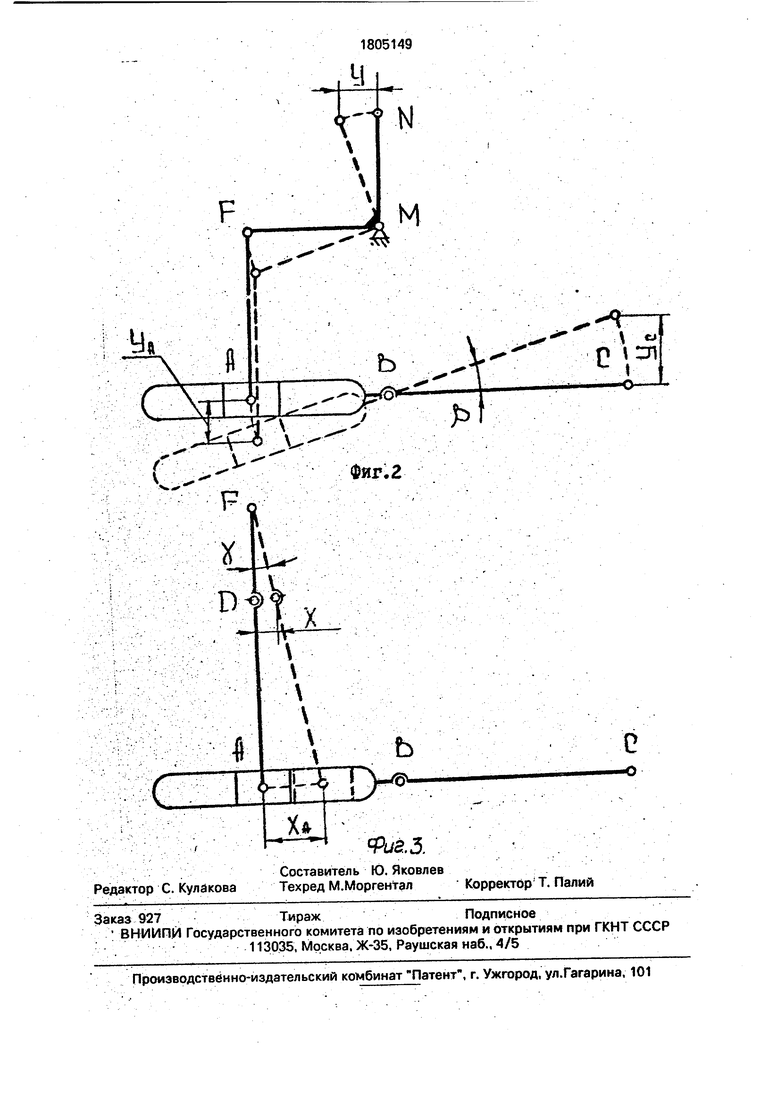
На фиг. 1 изображена кинематическая схема предлагаемого привода; на фиг. 2 - схема изменения положения звеньев привода при управлении положением осевой линии хода каретки; на фиг. 3 - схема изменения положения звеньев механизма при управлении величиной хода каретки.
Предлагаемый механизм содержит кривошип 1, шатун 2, кулису 3 с кулисным камнем 4, выполняющим роль подвижной управляемой опоры, ползун каретки 5. Управление величиной хода каретки осуществляется кулачком 6, связанным через ролик 7, ползун 8, шатун 9 с рычагом 10 и кулисным камнем 4. Управление положением осевой линии хода каретки осуществляется кулачком 11, связанным через ролик 12, ползун
13 шатун 14, серьгу 15 с рычагом 10 и кулисным камнем 4. Храповое колесо 16. установленное вместе с кулачками 6 и 11 на валу 17 и связанное с кривошипом 1 через шатун 2, рычаг 18 и маятник 19 на котором крепится собачка 20, сообщает кулачкам прерывистое вращательное движение на каждый полный оборот кривошипа. Пружины 21 и 22 обеспечивает силовое замыкание механизма.
Обозначим шарниры кулисного камня 4, кулисы 3, рычага 10 и серьги 15 соответственно через А, В, С, D, F, М, N.
Механизм работает следующим образом: кривошип 1гсовершая полный оборот, поворачивает храповое колесо 16 на один зуб. Вместе с храповым колесом поворачивается кулачок 6 управления величиной хода каретки и кулачок 11 управления положением осевой линии хода каретки. В зависимости от заданной профилем кулачка 11 программы получает смещение ролик 12 ползуна 13. Последний через шатун 14,
00
о ел
ь ю
серьгу 15, рычаг 10 переместит кулисный камень 4 в вертикальной плоскости. Кулиса 3 при этом повернется относительно оси шарнира В на угол ft . При известных размерах звеньев I АВ| , IBCI , IMF ,| MNI , а также зада иной величине Yc перемещения осевой линии хода каретки, можем определить величину приращения Y радиуса кривизны профиля кулачка 11:
Y YAYA Yc
А В
I.MN I I MF I
ВС
X ХА I DF I. I AF I
где Хд - величина перемещения шарнира А. Откуда
D F I (2 е t А С I -ХС I AB |)
I AF
() Применение привода каретки плосковязальной машины позволит по сравнению с прототипом упростить конструкцию приво- да и повысить надежность его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм привода каретки плосковязальной машины | 1990 |
|
SU1730266A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Установка для накопления кирпичей с зазором | 1985 |
|
SU1284836A1 |
| Привод прерывистого движения роторов упаковочных машин | 1976 |
|
SU590186A1 |
| Привод прерывистого движения роторов упаковочных машин | 1978 |
|
SU763198A1 |
| Кулисный рычажно-кулачковый механизм для воспроизведения заданных кривых | 1987 |
|
SU1441117A1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Привод прерывистого движения роторов упаковочных машин | 1980 |
|
SU975504A1 |
| Установка для накопления кирпичей с зазором | 1986 |
|
SU1402432A2 |
| ТКАЦКИЙ СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ КОСЫНОК | 1950 |
|
SU90620A1 |
Использование: текстильное машиностроение. Сущность изобретения: привод включает шарнирно-рычажный механизм, кинематически замыкающийся на вязальной каретке, два программных кулачка управления величиной хода каретки и положением осевой линии хода каретки. Кулачки содержат по периметрам смежные накладки, установленные с возможностью изменения профиля в зависимости от заданной программы. Кулачки приводятся в действие . храповым механизмом. Шарнирно-рычажный механизм содержит подвижную опору, управление которой осуществляется программными кулачками. 3 ил.
где YA- величина перемещения шарнира А. V v, I AB I I MNI Отсюда Y YC ТВТ-ГТМТТ
Кулачок 6 задает смещение ролику 7 ползуна 8, который, воздействуя через шатун 9 на рычаг 10, повернет его относительно оси шарнира F на угол а . При этом переместится кулисный камень 4, изменяя соотношение I ABI/ I ACI длин плеч кулисы 3. Очевидно, что от этого соотношения будет зависеть величина хода каретки, причем, при возрастании этой величины размах будет уменьшаться и, наоборот, приуменьшении увеличиваться. При известных размерах звеньев I ABI , I ACI , I AFT , I DFI , эксцентриситете е кривошипа 1 и заданной величине Хс хода каретки можем определить величину приращения X радиуса кривизны, профиля кулачка 6:
2 еХс I А В I + ХА I А С I + ХА &
5
0
5
0
Формула изобретения Привод каретки плосковязальной машины, включающий программное устройство для управления величиной хода каретки и положением осевой линии его хода, имеющее два кулачка, содержащие по периметру смежные накладки, установленные на одном валу со счетным устройством в виде храпового механизма и кинематически связанные с вязальной кареткой посредством шарнирно-рычажного механизма, содержащего ползун каретки, кривошип, шатун и кулису с кулисным камнем, отличаю- щ и и с я тем, что, с целью упрощения конструкции привода и повышения надежности его работы, кулиса шарнирно-рычажногомеханизма соединена непосредственно с ползуном каретки, а шарниры соединения кулисы с шатуном и ползуном каретки расположены с одной сто- роны относительного кулисного камня.
Jb k:
F
M
| № Ю.А.Яковлев, О.Н.Хомяк, Б.Ф.Пипа, .Максимюк и П.А.Присяжнюк Авторское свидетельство СССР 730266, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
