1
i Изобретение относится к испытательной технике и может применяться для испытаний конструкционных элементов и узлов механических систем,
Цель изобретения - повышение точности за счет приближения условий испытания к реальным условиям эксплуатации.
На чертеже представлена схема предлагаемого устройства.
Устройство содержит блок 1 питания, датчики усилия 2 и деформации 3 задатчик 4 деформации, блоки 5-8 сравнения, усилители 9-14, детекторы 15- 18, сумматоры 19-22, задатчик 23 усилия, трехпозиционный переключател 24, схемы 25 и 26 разноса порогов срабатывания, блоков сравнения, двухканальный самописец 27 с пере- ключателем 28 вида регистрации, пороговый блок 29 с переключателем 30, блок 31 сигнализации, магнитную систему 32 регистрации и считывания информации, индикатор 33 с переклю- чателем 34 и исполнительные узлы 35 и 36 с переключателем 37, Выход датчика 2 усилия через усилитель 9 и детектор 15 соединен с первым входом сумматора 19, второй вход которого соединен с первым выходом блока 1 питания, а выход - с переключателем 28 самописца 26 и с первыми входами блоков 5 и 6 сравнения, выход датчика 3 деформации через уси- литель 10 и детектор 16 соединен с первым входом сумматора 20, второй вход которого соединен с вторым выходом блока 1 питания, а выход - с переключателем 28 самописца 27 и пер-
винными входами блоков 7 и 8 сравнения, выходы усилителей 9 и 10 соединены с переключателем 34 индикатора 33 и, соответственно, с входами усилителей 11 и 12 выходы которых соединены с соответствующими входами магнитной системы 32 и через усилитель 13 и детектор 17 - с первым входом сумматора 2L. и через усилитель 14 и детектор 18 с первым входом сумматора 22 соответственно, вторые входы сумматоров 21 и 22 соединены, соответственно, с третьими и четвертыми выходами блока 1 питания, вторы входы блоков 5 и 6 сравнения соединены с соответствующими выходами схемы 25 разноса порогов срабатывания и через переключатель 24 - с выходом зацатчика 23 усилителя и выходом сумматора 21, вторые входы блоков 7 и 8 сравнения соединены с соответствующими выходами схемы 26 разноса порогов срабатывания и через переключатель 24 - с выходом задатчика 4 деформации и выходом сумматора 22, выходы блоков 5 и 7 сравнения дополнительно соединены с переключателем
28самописца, через пороговый блок
29- с блоком сигнализации и через переключатель 37 с исполнительным узлом 35, а выходы блоков 6 и 8 сравнения с исполнительным узлом 36,
Устройство работает следующим образом.
Предварительно производят испытание эталонного образца изделия, для чего образец устанавливается в захватах испытательной установки (не показана) и задатчиком 4 выставляют
значение деформации, которое должно поддерживаться в процессе испытания постоянным.
С помощью схемы 26 устанавливаются пороги срабатывания блоков 7 и 8 сравнения. Подключая поочередно индикатор 33 через переключатель 34 к выходам усилителей 9 и 10, выводят рабочие точки датчиков 2 и 3 на линейный участок их характеристик. Подключая индикатор 33 к выходам сумматоров 19 и 20 и изменяя напряжение, поступающее на их вторые входы с выходов блока I питания, добиваются нулевой компенсации выходных напряжений.
Затем электродвигатель привода испытательной установки начинает вращаться в направлении, отвечающем на- ращиванию растягивающей нагрузки на испытуемый образец. Это сопровождается появлением возрастающего напряжения на выходе сумматора 20, которое поступает на первые входы блоков 7 и 8 сравнения. При достижении деформации образца заданного значения блок 7 сравнения формирует сигнал, по которому исполнительный узел 35 останавливает электродвигатель.
При превышении деформации образца заданного значения блок 8 сравнения формирует сигнал, по которому исполнительный, узел 36 включает электродвигатель на реверс и возвращает деформацию к заданной величине.
Сигнал с выхода датчика 2 усилия через усилитель 11 поступает на вход магнитной системы 32 регистрации и считывания и записывается на одной из дорожек магнитной ленты.
Одновременно с этим на самописец 27 через переключатель 28 с выхода сумматора 19 поступает напряжение, соответствующее прилагаемому к образцу усилию, которое графически регистрируется на ленте в виде релаксационной кривой.
Затем заменяют ранее испытанный эталонный образец изделия на один из подлежащих контролю серийных образцов, и производят нарушение аналогично. ч При этом сигнал с выхода сумматора 19 поступает на первые входы бло- ков 5 и 6 сравнения, на вторые
10
15
20
25
30
35
40
45
50
на магнитной ленте системы 32 в про цессе испытания эталонного образца.
На ленте самописца 27 при этом графически регистрируется релаксационная кривая испытуемого серийног изделия, которая непосредственно на кладывается на ранее записанную соответствующую кривую эталонного образца.
На второй вход самописца 27 с вы хода узла 5 сравнения подается разностный сигнал, который графически воспроизводит непосредственно разность ординат релаксационных кривых серийного изделия и соответствующег эталонного образца.
Снятие кривых изменения деформации при постоянном усилии происходит аналогично. Требуемый уровень нагрузки при этом задается задатчи- ком 23, пороги срабатывания блоков 5 и 6 - схемой 25, а сигналы управления исполнительными узлами 35 и 36 формируются на выходах блоков 5 и 6 сравнения. При этом на вторую до рожку магнитной ленты системы 32 регистрации и считывания записывается сигнал с выхода датчика 3 деформации а на ленте самописца 27 регистрирует ся диаграмма зависимости величины де формации образца от времени.
После завершения цикла испытаний эталонного образца осуществляется контроль партии серийных изделий соответствующего типа.
Снимаемое с выхода сумматора 20 напряжение, соответствующее текущему значению деформации, поступает на первый вход самописца 27 и на первые входы блоков 7 и 8 сравнения, на вторые входы которых через переключатель 24 с выхода сумматора 22 поступает сигнал, пропорциональный деформации эталонного образца. При это с выхода блока 7 сравнения на второй вход самописца 27 подается разностный сигнал.
Устройством обеспечиваются также возможности воспроизведения в процес се испытания изделий реальных режимо их функционирования в условиях эксплуатации.
Для этого на соответствующие дорожки магнитной ленты системы 32 завходы которых через переключатель 24 писываются усилие и деформация изде0
5
0
5
0
5
0
5
0
на магнитной ленте системы 32 в процессе испытания эталонного образца.
На ленте самописца 27 при этом графически регистрируется релаксационная кривая испытуемого серийного изделия, которая непосредственно накладывается на ранее записанную соответствующую кривую эталонного образца.
На второй вход самописца 27 с выхода узла 5 сравнения подается разностный сигнал, который графически воспроизводит непосредственно разность ординат релаксационных кривых серийного изделия и соответствующего эталонного образца.
Снятие кривых изменения деформации при постоянном усилии происходит аналогично. Требуемый уровень нагрузки при этом задается задатчи- ком 23, пороги срабатывания блоков 5 и 6 - схемой 25, а сигналы управления исполнительными узлами 35 и 36 формируются на выходах блоков 5 и 6 сравнения. При этом на вторую дорожку магнитной ленты системы 32 регистрации и считывания записывается сигнал с выхода датчика 3 деформации, а на ленте самописца 27 регистрируется диаграмма зависимости величины деформации образца от времени.
После завершения цикла испытаний эталонного образца осуществляется контроль партии серийных изделий соответствующего типа.
Снимаемое с выхода сумматора 20 напряжение, соответствующее текущему значению деформации, поступает на первый вход самописца 27 и на первые входы блоков 7 и 8 сравнения, на вторые входы которых через переключатель 24 с выхода сумматора 22 поступает сигнал, пропорциональный деформации эталонного образца. При этом с выхода блока 7 сравнения на второй вход самописца 27 подается разностный сигнал.
Устройством обеспечиваются также возможности воспроизведения в процессе испытания изделий реальных режимов их функционирования в условиях эксплуатации.
Для этого на соответствующие дорожки магнитной ленты системы 32 за
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2434291C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ И КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2099787C1 |
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| Устройство контроля параметров движения транспортного средства (чёрный ящик) | 2022 |
|
RU2787806C1 |
| Устройство для контроля и регистрации нагрузочных характеристик транспортных средств | 1976 |
|
SU746642A1 |
| Устройство для проведения психологических исследований | 1985 |
|
SU1302297A1 |
| Автоматическое устройство для регистрации температурных зависимостей модуля упругости и внутреннего трения образца исследуемого материала | 1982 |
|
SU1037169A1 |
| Устройство для воспроизведения сигналов о быстроменяющихся случайных процессах с носителя магнитной записи | 1981 |
|
SU980135A1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2308766C2 |
| СПОСОБ РЕГИСТРАЦИИ И ВОСПРОИЗВЕДЕНИЯ ХАРАКТЕРА ПЕРЕМЕЩЕНИЯ ФРОНТА ВЗАИМОДЕЙСТВИЯ НОЖА РОТОРНОГО КОПРА С ИССЛЕДУЕМЫМ ОБЪЕКТОМ (СРЕДОЙ) И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1999 |
|
RU2173844C2 |
Изобретение относится к испытательной технике и может применяться для испытаний конструкционных элементов и узлов механических систем. Цель изобретения - повышение точности за счет приближения испытания к реальным условиям эксплуатации. На соответствующие дорожки магнитной ленты системы 32 записываются усилие и деформация изделия при натуральных условиях его эксплуатации. Далее управление процессом осуществляется по закону изменения во времени одного из параметров. Считываемый сигнал деформации и сигнал от датчика 3 деформации поступают на соответствующие входы блоков 7 и 8 сравнения, а считываемый сигнал усилия и сигнал от датчика 2 усилия - на соответствующие входы блоков 5 и 6 сравнения. Управляющий сигнал от блоков 5 и 6 или 7 и 8 поступает на входы исполнительных узлов, а разностный сигнал с блоков 7 и 8 или 5 и 6 соответственно - на вход самописца 27. 1 ил.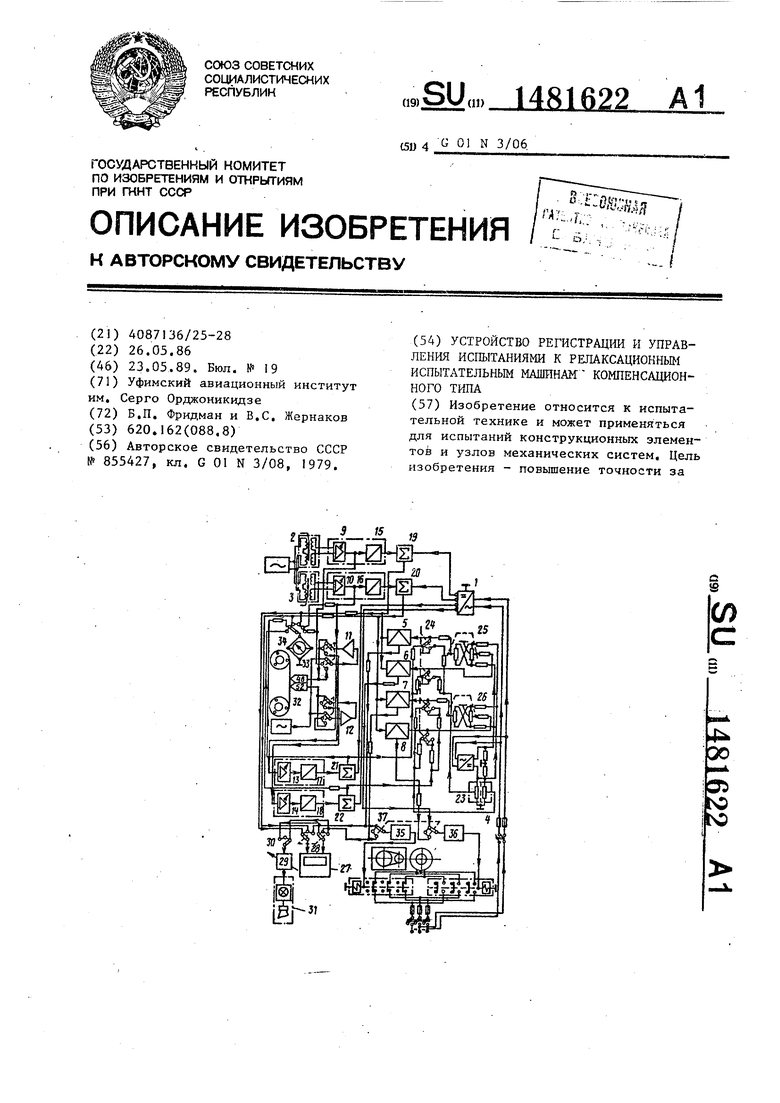
с выхода сумматора 21 поступает сигнал усилия, воздействовавшего ранее на эталонный образец и записанного
лия в натуральных условиях его эксплуатации. Далее автоматическое управление процессом осуществляется
по закону изменения во времени только одного из двух параметров усилия или деформации.Изменение другого параметра является производным. Считываемый сигнал усилия с выхода системы 32 через усилитель 13, детектор 17 и сумматор 21 поступает на вторые входы блоков 5 и 6 сравнения, на первые входы которых при этом поступает сигнал от датчика 2 усилия. Считываемый сигнал деформации через усилитель 14, детектор 18 и сумматор 22 поступает на вторые входы блоков 7 и 8 сравне20
ния, на первые входы которых при этом 15 блока питания, а выход - с переклю- поступает сигнал от датчика 3 деформации. Сигналы управления с блоков 5 и 6 (управление по заданной деформации через переключатель 37 поступают на входы исполнительных узлов 35 и 36, которые управляют электродвигателем, воспроизводя заданную нагрузку. При этом разностные сигналы с блоков 7 и 8 или 5 и 6 соответственно поступают на вход самописца 27. Пороговый узел 29 и блок 31 обеспечивают автоматическую сигнализацию о превышениях контролируемыми прочностными характеристиками испытуемых изделий установленных максимальных допусков на отклонение их регистрируемых параметров от нормы, определенной для соответствующего эталонного образца изделия,
Ф о р м у л
30
40
изобретения 35
Устройство регистрации и управления испытаниями к релаксационным испытательным машинам компенсационного типа, содержащее блок питания, датчики усилия и деформации, задат- чик деформации и блок сравнения, предназначенный для соединения с нагружающей испытательной машиной, отличающееся тем, что, с целью повышения точности за счет приближения условий испытания к условиям эксплуатации, оно снабжено тремя блоками сравнения, шестью усилителями, четырьмя детекторами, чеРедактор Н. Бобкова
50
Составитель М. Азиев Техред М.Дидык
чателем самописца и с первыми входам первого и второго блоков сравнения, выход датчика деформации через второ усилитель и второй детектор сое- динен с первым входом второго сумматора, второй вход которого соединен с вторым выходом блока питания, а выход - с переключателем самописца и первыми входами третьего 25 и четвертого блоков сравнения, выходы первого и второго усилителей сое- дине ны соответственно с входами третьего и четвертого усилителей, выходы которых соединены с соответствующими входами магнитной системы и через пятый усилитель и третий детектор - с первым входом третьего сумматора, а через шестой усилитель и четвертый детектор - с первым входом четвертого сумматора соответственно, вторые входы третьего и четвертого сумматоров соединены соответственно с третьим и четвертым выходами блока питания,вторые входы первого и второго блоков сравнения соединены с соответствующими выходам первой схемы разноса порогов срабаты вания и через трехпозиционный переключатель - с выходами задатчика деформации и четвертого сумматора,. выходы первого и третьего блоков сравнения дополнительно соединены с переключателем вида регистрации само писца и через пороговый блок - с бло ком сигнализации.
45
Корректор Н. Гунько
Заказ 2679/43
Тираж 790
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
тырьмя сумматорами, эадатчиком усилия, трехпозиционным переключателем, двумя схемами разноса порогов срабатывания блоков сравнения, двухканаль- ным самописцем с переключателем вида регистрации, пороговым блоком с переключателем, блоком сигнализации и магнитной системой регистрации и считывания информации, выход датчика усилия через первый усилитель и первый детектор соединен с первым входом первого сумматора, второй вход которого соединен с первым выходом
блока питания, а выход - с переклю-
чателем самописца и с первыми входами первого и второго блоков сравнения, выход датчика деформации через второй усилитель и второй детектор сое- динен с первым входом второго сумматора, второй вход которого соединен с вторым выходом блока питания, а выход - с переключателем самописца и первыми входами третьего и четвертого блоков сравнения, выходы первого и второго усилителей сое- дине ны соответственно с входами тре . тьего и четвертого усилителей, выходы которых соединены с соответствующими входами магнитной системы и через пятый усилитель и третий детектор - с первым входом третьего сумматора, а через шестой усилитель и четвертый детектор - с первым входом четвертого сумматора соответственно, вторые входы третьего и четвертого сумматоров соединены соответственно с третьим и четвертым выходами блока питания,вторые входы первого и второго блоков сравнения соединены с соответствующими выходами первой схемы разноса порогов срабатывания и через трехпозиционный переключатель - с выходами задатчика деформации и четвертого сумматора,. выходы первого и третьего блоков сравнения дополнительно соединены с переключателем вида регистрации самописца и через пороговый блок - с блоком сигнализации.
Корректор Н. Гунько
Подписное
| Устройство для испытания образцов материалов на растяжение | 1979 |
|
SU855427A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
