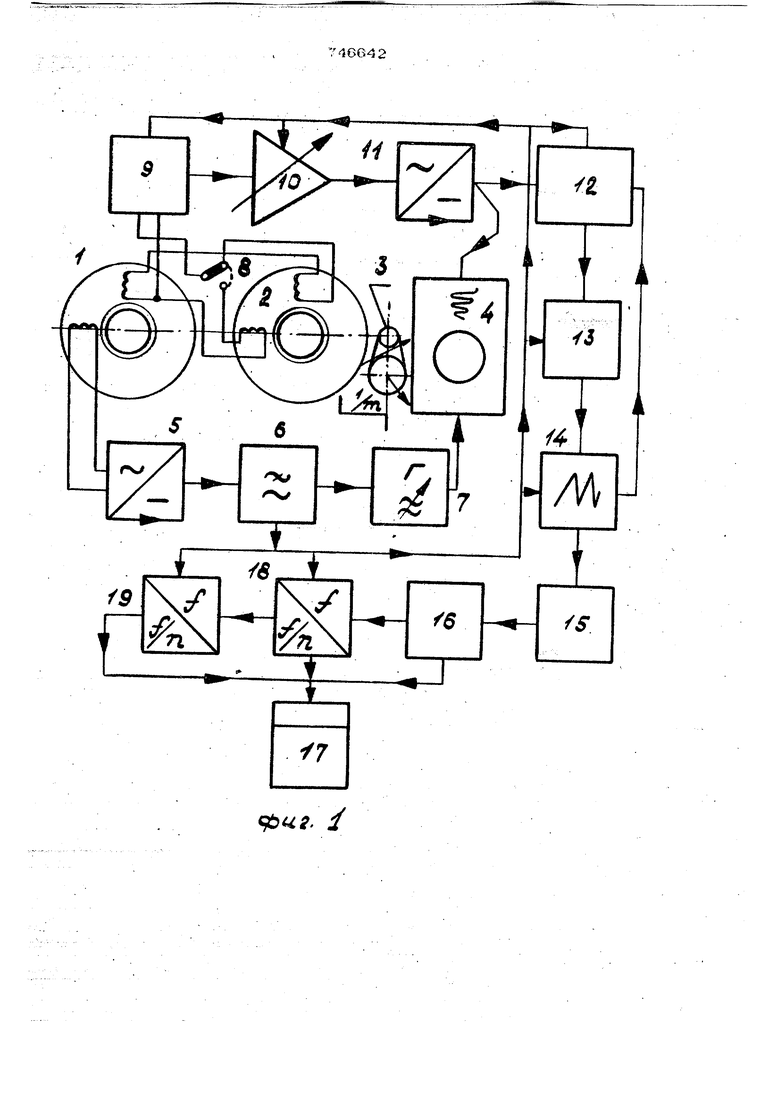
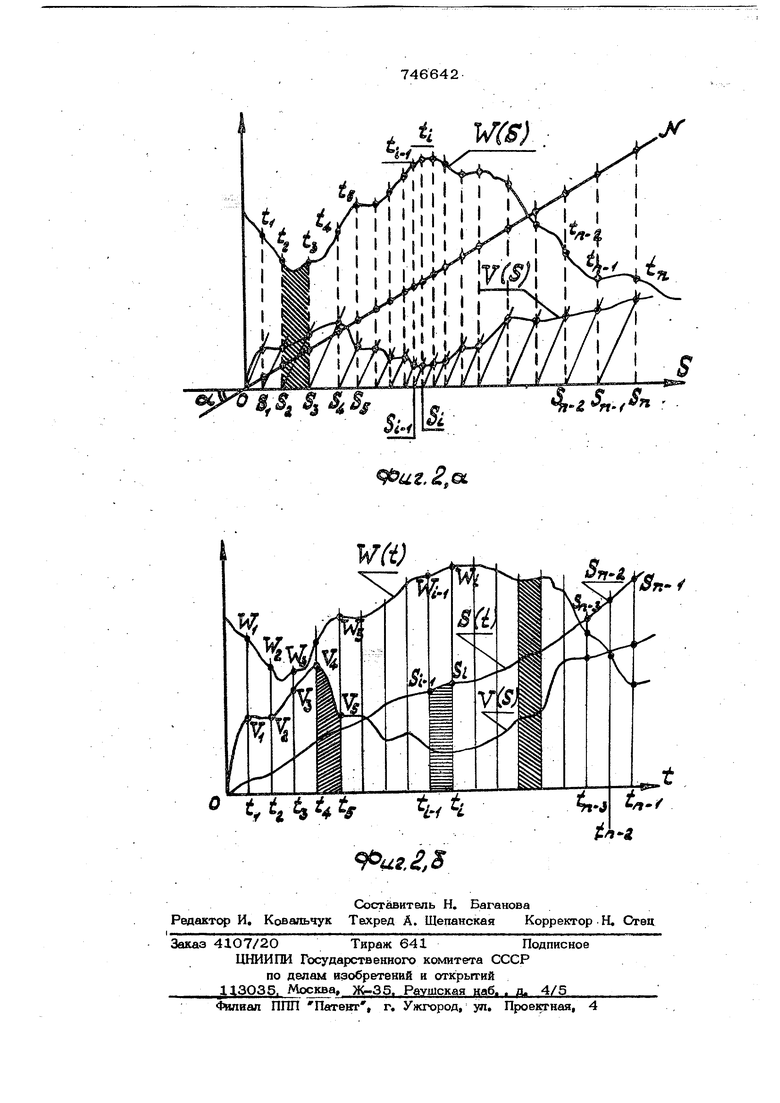
Изобретение относится к испытанию и контрсшю эффективности 1рансиортных средств, а более конкретно к автомгггнЗ1фованным следящим системам шш исследования рабочих нагрузочных характеристик транспортных средств с колесной и гусеничной ходовой частью. Известно устройство для ксжтроля эффективности использования и производительности трансйортш 1х средств, содержащее датчики, подключенные к усилителю, соединенному с транспортным повяхфителем генератор импульсов, детектор и счетчик 3. Недооатком его является невысокая на№жнос ь и тонность работы. Наиболее близким техническим решением является устройство для контроля и регистрации тоннокш1ометра«а транспортных средств, содержащее двухобмоточный тахо метрический датчик, одна из обмоток KOTO рого подключена к детектору последовательно соединеннся у с филыгром, эммнтерный повторитель, преобразователь перемен ного напряжения в постоянное, выход которого подключен к сдаем у на входов блока отрабсггки, выкоры копгорого непрсредс твевно и через регулятор тока соединены с одним из аходов релаксационного из выходов подключен к третьему входу блсжа отработки, а другой выход через дифференцирующий элемент подключен ко входу переключателя, выходы которого непосредственно и через делитель частоты соединены со счетчиком 1X1 Недостатком его является узкая фуш циовальная возможность за счет того, что устройство обеспечивает лишь дискретный характер регистрации, причем только витегральным итоге и только одного сводного параметра транспортных средств. Цель изо етешш - расширение функн диональных возможностей устройства. Это достигается тем, что в устройство введены кинематически соединенные sfPoptA тахс етрический датчик, редуктор и лео тояный самописец, дополнительный перек лючатбль, генератор меток, эмиттервый по fittjpHtenb и усилитель MIWHUOCTH, причем, /ругая обкгб й первого ахьмет рического датчика и синфазная ей первая обмотка второго тахометрического датчика включу iSi встречно и через дополнительный переключатель соединены с первым fsaoaoM эмйттернбгЬ повтйрителй, Шкод ifdroplSf о подключен к одному иэ входов усилителя мощности, выход которого через преобра зовбргель переменного напряжения в псюто янное соединен с оращ из вкоДОв йёитсЯногр caMceiHcua, Щ)угой вход которого под ключен к генератору меток, а выход фильтра соединен со вторыми входами амвгттерного повтори еяя,. с другими входами усилителя мощности, блока отработки, регулятора тока, релаксацисяшого узла и со входами делителей частоты, третий восОД эмиттерного повторителя соединен с концами второй обмотки первого тахометрй. ческсяо датчика и второй обмдт1аг Твтгарбгб тахометрического даггчика, другой конец которой подключен к дополнительному переключателю.- 1 На фиг. 1 изображена функциовальная блок-схема устройства на фиг. 2а приведены функционал ЬЕ1ые зависимости, регистр рируемые описываемым устройством, которые содержат инфс мацию о взаимосвязи tt lpftbf пЖраМётрбв xajpaKTqpHcTHK kojTD-. ролируемого транспортн ях объекта; на фиг. 26 показан принцип графического построения и перехода 6т одного|вйда харак теристик к другому. Устройство состоит из двух тахометри- ческнх датчиков (тахогенераторов племен кого тока) 1 и 2, роторы которых, разнесенные на некоторое расстоажие вдоль общей оси вращения, насажены на привопнсиК вал, связывающий двигйтедь исследуемой транспортной-единицы с ее ходовой частью Роторы тахометрических датчиков 1 и 2 при ненагруженном состоянии приводного вала устанавливаются и фиксируются в строго синфазном положении. Входная ось преобразователя 3.числа оборотов (редуктора) совпадает с общей осью тахометрических датчиков 1 и 2, а выходная ось. редуктора 3 совмещена с осью привода ленточного самописца 4 (на фиг. не показан). Первая обмотка TaxiaMeipH ecKoro дач чика 11 соединена с детектором 5 и филь ром 6, ОДИН из йьгхЬдов которого соединен со входом генератора 7 меток. Втсфая из обмоток тпахометрического датчика и синфазная с ней обмотка тахометрического датчика 2 (обе на фиг. 1 асположены вертикально) соединены вст ечно друг по отношению к другу и по лючены к одной из двух входных клемм дополнительного переключателя 8, общая выходная клемма которого соединена с дним из входов эмиттерного повторителя 9, другой вход i Toporo связан с обей точкой соединения концов второй (вертикальной) обмотки тахометркческого датчика 1 и первой (горизонтальной) обмотки датчика 2, другой конец которой подключен ко второй входнсЛ клемме до полнительного переключателя 8. Выход эмиттерного повторителя 9 соединен с первым входом усилителя 1О мощности. К выходу узла 10 подключён вход преобразователя 11 переменного напряжения в постоянное, выход которого параллельно связан как с одним из входов ленточного Самописца 4, так и с первым входом блока 12 отработки, к выходу которого последоввгега.Но подключены своими первыми аходами регулятор 13 тока и релаксационный узел 14. Выход релаксационного узла 14 соединен со вторым входом блока отработки 12, в то время как второй выход релаксационного узла подключен к последовательно связанным дифференцирующему звену 15 и переключателю 16, который соединен со счетчиком 17 непосредственно, а также через выход каждого из/двух последовательно включенных делителей 18 и 19 частотьи Выход генератсра 7 меток соединен с вертикальным входом ленточного самописца 4, а второй из выходов фильтра 6 параллельно связан со вторыми входами эмиттерного пойторителя 9, усилителя 10 мощности, регулятора 13 тока, релаксационного узла 14, со вторыми входами двух делителей частоты 18 и 19, а также с третьим входом узла отработки 12. Устройство работает следующим образом. При отсутствии движения контролируемой транспортной единицы все четыре сзбмотки тахометрических датчиков 1 и 2 лишены электродвижущей Силы, детектор 5 и питаемые через фильтры 6 остальные узлы контрольного устройства обесточены. Система находится в ждущем состоянии... Роторы датчиков 1 и 2 сфазированы так, что если после запуска двигатель контролируемой транспортной единицы работает вхолостую, т. е. если приводной uaji не нагружен (сцегигоиио отжато), то в обоих вертикальных и в обоих горизонтальных обмотках тахометрическах датчиков 1 и 2 наводятся строго синфазные друг другу (попарно) электродвижущие сильи В результате этого при указанных условиях со встречно-последовательно соединенных вертикальных обмоток датчиков 1 и 2 на симметричный вход эмиттерного повторителя 9 через переключатель 8 в его верхнем положении не будет поступат сигнал (вследствие взаимной компенсации строго синфазных напряжений, наводимых во встречно включенных вертикальных обмотках тахометрических датчиков), И несмотря на то, что выпрямительный узел 5 через фильтр 6 будет питать постоянным током все остальные узлы устройства, он будет бездействовать. С началом движения контролируемого транспортного объекта одновременно с подачей Напряжения питания с выходов фильтра 6 на потребляющие входы узлов 7, 9, 10, 12, 13, 14, 18, . 19 на вхо де эмиттерного повторителя 9, подключен ном через дополнительный переключатель 8 (в его верхнем положении) ко встречно-последоватепьно соединенным вертикальным обмоткам тахометрических датчиков 1 и 2, возникает переменное напряжение, обусловленное нарушением противофазности электродвижущих сил, наводимых во встречно включенных вертикальных обмотках датчиков 1 и 2 при введенном сцеплении двигателя с ходовой частью транспортной единицы и приложении к приводному валу, на который насажены роторы датчиков 1 и 2, крутящего момента. С выхода эмиттервото повторителя 9 предварительно усиленный разностный сигнал встречно включенных вертикальных обмоток датчиков 1 и 2 поступает на вход усилителя 10 мощности , а затем - на вход преобразователя 11 переменного напряжения в постоянное, который осуществляет амплитудное детектирование и фильтрацию результирующего разностного снг нала датчиков 1 и 2,/ Продетектированный узлом однополярный пульсирующий сигнал, пропорциональный положению переключателя 8 как мгновенной скорости вращения приводного ва- ла, так и углу его скручивания или вращающему моменту, воздействующему на вал, одновременно поступает на регистрационный вход ленточного самописца 4, и на один из входов блока 12 отработки. Одновременно с поступлением выходного сигнала преобразовательного узла 11 на первый аход ленточного самописца 4, на другой аход этого самописца будет поступать импуЛьсный сигнал с выхода г&наратора 7 меток, а ось внешнего механического приводи ленточного саьлописца 4 (на фиг. не показана) получит вращение с выхода преобразователя 3 числа оборотов (редуктора), входная ось которого связана с общей осью тахометрических датчиков 1, 2, и, соответственно с приводным валом ходовой части контролируемого транспортного объекта. Таким образом, ленточный самописец 4 параллельно получает на свои вхоДы три вида информации, которые подлежат совмещенному визуальному воспроизведению на общем графике. Поскольку роторы насаженных на общий приводной вал (с определенным разносом вдоль оси этого вала) тахометрических датчиков 1 и 2 сфазированы так, что. при исходном ненагруженном состоянии вала на вертикальных обмотках датчиков 1 и 2 наводятся строго синфазные напряжения, копгорьте при холостом вращении вала и верхнем положении дополнительного переключателя 8 взаимно компенсируются, то очевидно, что на симметричный вход эмиттерного повторителя 9 переменный сигнал с выходов датчиков 1 и 2 не будет поступать если приводной вал неподвижен и ни в одной из обмоток тахометрических датчиков 1 и 2 не наводится эЛектродвижущая сила, (что справедливо для верхнего и нижнего положений переключателя 8 рода контроля 1ФИ неподвижном валу) и если приводной вал вращается без нагрузки (вхолостую, при отсутствии скручивающего момента), когда синфазно наводимые в вертикальных обмотках датчиков 1 и 2 нап- ряжения полностью компенсируют друг друга (что справедливо при верхнем положении переключателя 8). С начвпом перемещения контролируемого транспортного объекта, вследствие де- формад ИИ скручивания приводного вала под действием вращающего момента нарушает ся синфазность наводимых а вертикальных обмотках датчиков 1 и 2 электродвижущих сил, каждая на которых по амплитуде строго пропоршюнальна скорости вращения привсаного вала двигателя. Возникающая при движе1ти транспорт ного объекта разность напряжений, обусовленная сдвигом фаз ЭДС, наводимых в ертикальных обмютках датчиков 1 и 2, noctT naef через дополнительный переключатель 8 в его верхнем положении на вхо; эмиттерногч повторителя 9, а nocyie усиления и детектирования узлами 10 и 11 на вход самописца 4., этом уровень переменного сигнала н симметричном в.хрде блока 9, йЖн уровень однополярного пульсирующего по величине C нала на выходе преобразователя 11 оНновр менно является линейной функцией двух ар гументс :, мгновенного значения скорости вращения приводного вала (число оборотов и угла скручивания этрго вала или воздействующего на вал крутящего момента т.е (t))M(.cu(t).M(t} К lJt{RP K vp т ,л . )(t);w(t)--K., где uj(t) - мгновенное значение угловой скорости приводного вала; M(t) - текущее зваЧение вовздействуйЩегЬкЙ1йап скуривающего кюмента; - число оборотов роторов датчиков 1 и 2 в сёкувоу R - эквивалентный радиус (пле%о) првложе я скручивающей приведшей вал силы вращения Р V- эквивалентная линейная скорость перемещения указанной силы (Р)| К и К - коэффициенты пропорциональ.««...;.....-...:«-.НОСТИ} , .. - .- . и. - амплитудное значение переме& ного сигнала на входе эмиттерного повторителя 9 при верхнем положении переключателя 8 рода контроля} и (i) - мгновенное значение пульсирующего сигнала на выходе преобразователя 11 при веркнем положении дополнвтельно го переключателя 8, При указанных условиях на вертикальны (регистрирующий) вход самописца 4 с вь хода узла 11 поступает сигнал U(t) у мгновенный уровень которого строго пропорционален мощности, развиваемой в данный момент времени двигателем и ходовой частью обследуемой транспортной ё ийицЫу т.е. U(t),.vp-KoWCt) где W (t) - мгновенное звачение мощности на приводном валу контролируемого объекта. Таким, образом, в процессе преодоления исследуемой транспортной единицей Контрольного маршрута на вход самописца 4 с выхода преобразователя 11 подается сигнал, пропорциональный мгновенному значению мощности А/ , затрачиваемой транспортным объектом на различных участках сложно-Пересеченной трассы, в то время как перемещение ленты самописца, осуществляемое через редуктор 3 от приводного вала исследуемой транспортной единицы, происходит синхронно с пространственным перемещением всего контролируёмогб объекта вдоль его марщрута., Поступаюише на регистрационный вхрд самописца 4 импульсы с выхода генератора 7 меток, образуют на вычерчиваемой диаграмме WP () марки времени t - t (S- пройденный контролируемым объектом путь). Диаграмма (з) (фиг. 2а) характеризует распределение мрщности в отдельньк трш;сы, а также характер распр деления работы, соверщаемой двигателем и ходовой частью транспортной единицы при преодолений ею различных участке исп| ггатвльнсб трассьи Плсяцадь каждой фигуры, ограниченной осью абсцисс (ось s , фиг. 2а) кривой W (в) и смежными ординатами, про(ходв- щими через метки - t п маркерного генератора 7, соответствует работе, затраченной испытуемым объектом на прёодопёние им соответствующего участка трассы. Так, например, площадь заштрихованного участка (фиг. 2а) отвечает работе в интервале времени . 3 Р прохождении участка пути с расстоянием S - Sj Площадь всей фигуры, ограниченной кривой W (б ), 1(х;ью$и крайними ординатами этой кривой s О и S (фвг. 2а), соответствует полной работе транспортной единицы на преодоление всего контрольного марщрута. Кривая V (s) регистрируемая самописцем 4 при перевесе дополнительного переключатеъля 8 в нижнее псяожение, иллюстрирует характер изменения скррости контролируемого объекта в зависимости от проходимых участков пути (s) и на протяжении рпредвленньсх временных интервалов ( п ) В рассмотренных режимах работы уст ррйства лента самописца 4, приводимая в движение от редуктора 3, перемещается строго в соответствии с пространственным перемещением контролируемой транспортной единицы, в то время как поперечное отклонение пера самописца от нулевого ложения является пропорциональным мгн венно развиваемой транспортным объекто мощности W . При переводе допсшнитепьного переклю чателя 8 в нижнее положение и отключе-нии самописца от внешнего привода -- редуктора 3, когда лента под действием внутреннего автопривода самописца перемешается равномерно во времени, устройст во воспроизводит характер изменения мгно венной скорости вовремени -v(t) (фиг,2б) Площадь заштрихованной фигуры, заключенной между кривойV (t) осью t и соседними ординатами, проходяитми через временные марки, например, t« и t (фиг. 26), соответствует длине участка трассы, пройденного транспортным средством за временной:интервапЪ t . непосредственного воспроизведения самописцем 4 зависимостиV (t), эта кривая, как и зависимость текущего значения пройденного пути в функции от времени5 (t), может быть получена и производным гр ическим путем на базе кривых (фиг. 2а). Так, для указанного построения кривой V(t) по оси абсцисс графика (4яг. 26) откладьшаются равньте отрезки , -..f.; отвечсоошие -5L- -3 временным интервалам, в течение которых исследуемым объектом соответственно проходятся участки пути О - 5 . So S а в качестве ординат псмгученных абсцисснък точек t f г з берутся соответствуюпдае этим моментам времени (Ц- tn ) ординаты V« Va V , ... Елв пропорциональные им агрезки, п еносимые на график фиг. 26 с соот ветствующей кривой V (в) фиг. 2а. Для построения зависимости $ (t) (фиг. 26) через начало координат графика (фиг. 2 а) проводится прямаяQV под угломok к оси абсцисс. Тангенс этого угла опредепяеФся требуемым масштабом преобразования параметра S : tg Л «MS, Затем отсекаемые линией ON оггрезки ординат, исходящие от временных маток оси $ на графике (фиг. 2а), принимаются в качестве оралнвт абсциссных точек , t. , графика S(t) (фиг. 26). Соответственно, описываемым устройствсил обеспечивается возможность получе ния зависимостей мгновенной мощности в функции от пути W (3) ив функции от вре менной W (-fc) - как непосредственно, путе изменения режима привода ленточного с&мописца при верхнем положении nepetaao чателя 8, так и путем аналогичного вышерассмотренному преобразования одного из графиковW(б) (фиг. 2а) в другой -W(t) (фиг. 26). Располагая из получаемых графиков (фиг. 2а,б) взаимосвязью между мгнсйен- ной мощностью и мгновенной скоростью транспортной единицы, а также зная ха-. рактер изменения указанной взаимосвязи на различных участках марщрута в зависимости от рельефа местности и профиля контрольной трассы, нетрудно провести всесторонний качественный анализ поведения исследуемого объекта и оперативно опред&лить все его эксплуатационные характеристики. Площади фигур, заключенных между кривыми W (t) и V (t) с одной стороны, а также осью абсцисс t и ординатами, ограничивакяцими требуемый временной интервал контроля (фиг. 26) - с другой, определяются интегралами . ,V ( и Vi (b)G.t , которые .отвечают соответственно затраченной работе (А) и пройденному пути (S) исследуемой транспортной единицы на протяжении временного интернвала i - ti Наряду с графическим воспроизведением закономерностей изменения и взаимосвязи указанных параметров в пространства (на различньсс участках трассы) и во времени, првйпагаемое устройство обеспечивает также контроль и интегральную регистрацию указанных, параметров в дискретно-цифровой форме. Это обеспечивается тем, что одновременно с подачей продетектированного узлом 11 пульсирующего сигнала на вход ленточного самописца 4 выходной сигнал узла 11 поступает также на один из входов блока 12 отработки. На второй из входов блока 12 отработ ки подается сигнал с одного из выходов релаксационного узла 14, вход которого через регулятор тока 13 получает сигнал с выхода блока 12 отработки. Напряжение, создаваемое током релаксационного узла 14, сопоставляется в блоке 12 с продетектированным пульсирующим надряжением, которое подается на первый из аходов блока 12 отработки с выхода преобразователь ного узла 11. Выходное напряжение блока 12 отработки, соответствующее разности сопрставляемьвс на этом узле напряжений, подаваемых на входы этого узла как с выхода преобразователя 11, так и по цепи управяющей обратной связи с выхода рвлакс циошгого узла 14, воздействует с выхода блока 12 отработки через регулятор 13 тока на зарядную цепь релаксационного узла 14 (на фиг, не показана), формйру емая пилообразным сигналом частота t является пропорциональной уровню напряжения на выходе узла 11 или мгновенному значению мощности, развиваемой на приводном валу ходовой части контропируе мой транспортной единицы, т. l-KW(t)-K гдaw{t) мгновенное значение мощности на приводном валу} работа, производимая ходовой частью транспортного средс- ва;частота релаксационных колебаний, гeнepиpye Ы c узлом 14i коэффициент пропорциональности. Варьируемый по частоте пилообразный сигнал, отслеживаюишй закон изменения КОнеженной мощности на приводном валу транспортной единицы, с выхода релаксационного узла 14 поступает через диффе. ренцирующее звено 15 на переключатель 1 Если 11реоб)разованное однополярное напряжение на вькоде узла 11 является пульсирующим и повторяет характер измеяецвя мощности обслуживаемой транспортной единицы во времени при прохождении контрольной трассы, то вырабатываемое в это же время напряжение на выходе детектора 5 после прохождения через фильтр 6, содержащий стабилизируклйше злёмевггы становится фиксированным по уровню, что обеспечивает независимость питания узлов системы по постоянному току от изменени режима работы исследуемой трансаортной единицы в процессе ее испытаний. В зависимости от положения переключателя 16, дифференцированные импульсы с выхода узла 15 поступают на счетчик 17 непосредственно, либо через одну или обе делительные ступени 18, 19, изменя ющие масштаб регистрации счетчиком 17 контролируемого параметра. В соответствии с положениями дополни тельного переключателя 8 счетчик 17 осу ществляет функции интегрирования во времени мгновенной мощности iM(t) коигролиру емого транспортного объекта либо его мгновенной скоростиV(t). Так, при положении дополнит ел ного переключателя 8 счетчик 17 р|ёализует операцию интегрирования, в результате которой определяется полная работа, затрачиваемая двигателем обследуемого объекта в преодоления им конт рольной трассы с произвольно сложным арактером профиля: ,(t)c t-K5 dt. (здесь t и tij - соответственно время конца и начала отсчета контролируемого параметра, К - коэффициент пропорциональности). При переводе дополнительного переключателя 8 в нижнее положение на вход эмиттерного повторителя поступит сигнал со второй (горизонтальной на фиг. ) обмотки тахометрического датчика 2. Этот сигнал, пропорциональньй мгновенной скорости исследуемого транспортного объекта, после усиления, детектирования преобразуется узлами 12, 13 и 14 в частотно модулированный (в соответствии с изменяющейся скоростью объекта) пилообразный сигнал, который дифференцируется звеном 15 и регистрируется счетчиком 17 в форме интегрального итога 2 Jfc , ®t . () мгновенное значение скорости, - путь, пройденный транспортHbiM объектом во временном интервале Ц - t,j; к - коэффициент пропорциональносТаким образом, графическая регистрация зависимостей мгновенного значения мощности, элементов работы и мгновенной скорости с транспортного объекта в функции от времени и в функции от текущего значения пройденного пути сочетается у описьшаемого устройства с возможностями параллельной регистрации интегральным итогом в дискретно-цифровой форме проходимого пути по пересеченной трассе сложной конфигурации, а также соверщаемой двигателем и ходовой частью транспортного средства работы на отдельных участках пути и на протяжении всего контрольного маршрута Способность предлагаемс го устройства осуществлять автоматическое .следящее воспроизведение в графической и статистической формах законов изменения параметров мгновенной моишости, скорости, характера распределения на различных участках трассы совершаемой работы в функциях от расстояния и времени, а также с учетом особенностей местности и профиля контрольной трассы, открьшает качествен но новые ВОЗМОЖНОСТИ для всестороннего исследования и анализа ходовых и рабочих характеристик испытуемых транспортных средств при расширенных оперативно-технических возможностях, высокой степени удобства и Надежности контрольной систе мы. Формула изобре т е н и я Устройство для контроля а регисяграции нагрузочных характеристик транспортных средств, содержащее двухобмоточный тахометрический датчик, одна .из обмотчж которого подключена к детектору, последо вательно соединенному с фильтром, эмвт тфный повторитель, преобразователь п&ременного напряжения в постоянное, вь1Хо которого подключен к одному из входов блока обработки, вькод которого и через регулятор тока соедннен с одним из входов релаксаиионного блока узла, одян из выходов которого оодкточен к третьему входу блока отработки, а другой выххщ через дифференцирующей элемент, подключен ко входу переключетеля, выходы которого непосредственво и через делитель частоты соединены со счетчиком, отличающ е е с я тем, что, с аелью расширения функциональных возможностей устройства, в него введены кинематически соединенные второй тахометрический датчик. редуктс и ленточкый самописец, дополнительный перек/иочатель, генератс меток, эмиттерный повторитель и усилитель мощности, причем, другая обмотка первсях) тахометрического датчика и синфаэная ей первая обмотка второго Тбосометрического датчика, включены встречно и через дополнительный переключатель соединены с первым входом эмиттерного по&торителя, выход которого подключен к одиому из входов усилителя мощности, выход которого через преобразователь переменного напряжения в постоянное соединён с одним из входов ленточного самописца, другой вход которого подключен к генератору меток, а выход фильтра соединен со вторыми входами эмиттерного повторителя, с другими входами усилителя мощности, блока обработки, регулятора тока, релаксационного узла и со входами делителей частоты, третий вход эмитт ного повтсч ителя соединен с концами второй обмотки первого тахометрического датчика и второй обмотки второго тахсялетрического датчика, аругоА конец которой подключен к дополнительному переключателю. Источники информации, 1 нятые во внимание при экспертизе 1. Авторское свидетельство СССР № 388286, кл. q 07 С 5/10,07.12.70, . 2. Авторское свидетельство СССР № 542214, кл. G О7 С 5/1О, 24. Об. 74... (прототип).
/