Известны аэродинамические весы, обеспечивающие дистаационную передачу измеряемых механических величин, со струнными датчиками и электронным блоком, которые используются в качестве преобразователей механической величины в электрическую.
Предлагаемые аэродинамические весы отличаются от известных тем, что обеспечивают повышенную точность измерений и получение результатов измерений непосредственно в единицах из:меряемой величины. Это преимущество Предлагаемых весов достигн то тем, что в них использована силопреобразующая система, геОМетрически подобная системе, воспринимающей усилие, и связанная € ней посредством электродвигателя с центробежным механизмом, который преобразует электрические сигналы в динамическое усилие.
Для переноса начала координат выбранной для отсчета системы в соответствии с заданной .схемой действующих сил, преобразующая система снабжена телескопическим узлом и передвижной кареткой.
Предлатаемые аэродинамические весы могут быть использованы для снятия аэродинамических характеристик моделей летательных аппаратов в аэродинамических трубах и газодинамических установках.
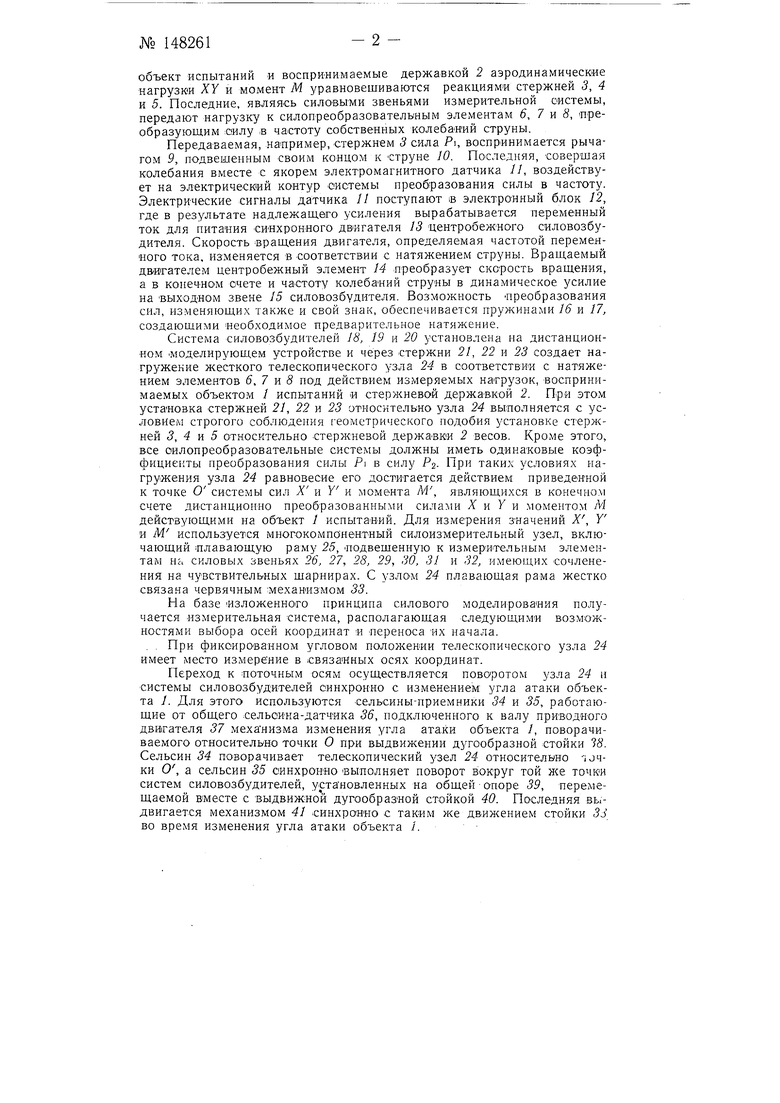
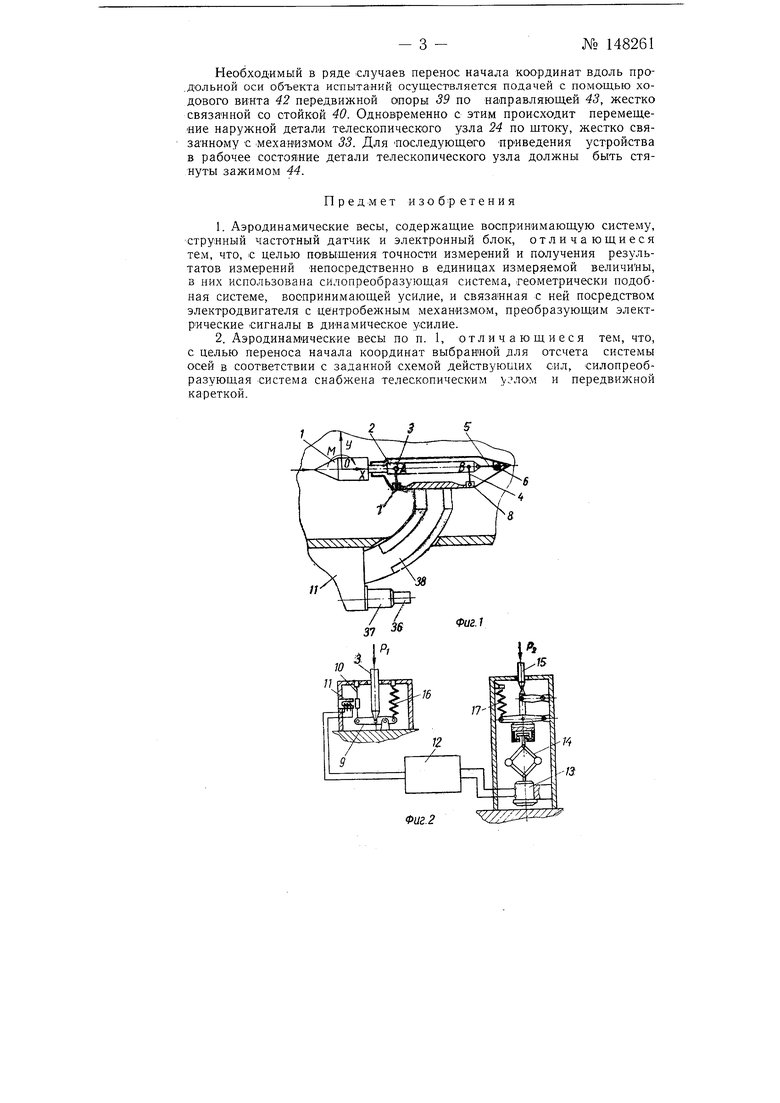
На фиг. 1 показана схема установки испытуемого объекта в аэродинамической трубе; на фиг. 2-система дистанционного силопреобразова1ния; на фиг. 3-система силовозбудителей.
В основу устройства предлагаемых весов положено применение дистанционной силовой моделирующей системы с использованием струнного преобразователя силы в частоту в комбинации с обратным преобразователем частоты в силу, позволяющим воспроизвести в нужном масштабе и с высокой точностью систему основных сил, действующих на объект испытаний и жесткую державку.
Обдуваемый потоком аэродинамической трубы о-бъект 1 испытаний жестко закрепляют на стержневой державке 2. Действующие на
№ 148261- 2 объект испытаний и воспринимаемые державкой 2 аэродинамические нагрузки XY и момент М уравновешиваются реакциями стержней 3, 4 и 5. Последние, являясь силовыми звеньями измерительной системы, передают нагрузку к силопреобразователыным элементам 6, 7 и 8, преобразующим силу iB частоту собственных колебаний струны.
Передаваемая, например, стержнем 3 сила Pi, воспринимается рычагом 9, подвешенным своим концом к струне 10. Последняя, совершая колебания вместе с якорем электромагнитного датчика 11, воздействует на электрический контур системы преобразования силы в частоту. Электри-ческие сигналы датчика // поступают IB электродный блок 12, где в результате надлежащего усиления вырабатывается переменный ток для питания синхронного дв игателя 13 центробежного силовозбудителя. Скорость вращения двигателя, определяемая частотой переменного тока, изменяется в соответствии с натяжением струны. Вращаемый двигателем центробежный элемент 14 .преобразует скорость вращения, а в коиеч-нОМ счете и частоту колебаний струны в динамическое усилие на ВЫХОДНОМ звене 15 силовозбудителя. Возможность преобразования сил, изменяющих также и свой знак, обеспечивается пружинами 16 и 17, создающими необходимое предварительное натяжение.
Система силовозбудителей 18, 19 и 20 установлена иа дистанционном моделирующем устройстве и через стержни 21, 22 и 23 создает нагружение жесткого телескопического узла 24 в соответствии с натяжением элементов 6, 7 и 8 под действием измеряемых натрузок, воспринимаемых объектом / испытаний и стержневой державкой 2. При этом установка стержней 21, 22 и 23 относительно узла 24 выполняется с условием строгого соблюдения геометрического подобия установке стержней 3, 4 к 5 относительно стержневой державки 2 весов. Кроме этого, все оилопреобразовательные системы должны иметь одинаковые коэффициенты преобразования силы .Pi в силу Pj. При таких условиях нагружения узла 24 равновесие его достигается действием приведенной к точке О системы сил X и У и момента Л1, являющихся в конечном счете дистанционно преобразованными силами . и У и моментом М действующими на объект / испытаний. Для измерения значений X, У и JW используется многокомпонентный силоизмерительный узел, включающий плавающую раму 25, подвещенную к измерительным элементам На силовых звеньях 26, 27, 28, 29, 30, 31 и 32, имеющих сочленения на чувствительных шарнирах. С узлом 24 плавающая рама жестко связана червячным механизмом 55.
На базе изложенно го принципа силового моделирования получается измерительная система, располагающая следующими возможностями выбора осей координат и переноса их начала. . . При фикоирскванном угловом положении телеско-пического узла 24 имеет место измерение в связаНных осях координат.
Переход к поточным осям осуществляется поворотом узла 24 и системы силовозбудителей синхронно с изменением угла атаки объекта /. Для этого используются сельсины-приемники 34 и 55, работающие от общего сельсина-датчика 36, подключенного к валу приводного двигателя 57 механизма изменения угла атаки объекта /, поворачиваемого относительно точки О при выдвижении дугообразной стойки 18. Сельсин 34 поворачивает телескопический узел 24 относительно -iочки О , а сельсин 55 синхронно выполняет поворот вокруг той же точки систем силовозбудителей, установленных на общей опоре 39, перемещаемой вместе с выдвижной дугообразной стойкой 40. Последняя выдвигается механизмом 41 синхронно с таким же движением стойки 5j во время изменения угла атаки объекта /.
Необходимый в ряде случаев перенос начала координат вдоль про,дольной оси объекта испытаний осуществляется подачей с помощью ходового виита 42 передвижной опоры 39 по направляющей 43, жестко связяниой со стойкой 40. Одновременно с этим происходит перемещение наружной детали телескопического узла 24 по штоку, жестко связанному с .механизмом 33. Для последующего приведения устройства в рабочее состояние детали телескопического узла должны быть стянуты зажимом 44.
Предмет изобретения
1.Аэродинамические весы, содержащие воспринимающую систему, струнный частотный датчик и электронный блок, отличающиеся тем, что, с целью повышения точности измерений и получения результатов измерений непосредственно в единицах измеряемой величины, в них использована силопреобразующая система, геометрически подобная системе, воспринимающей усилие, и связанная с ней посредством электродвигателя с центробежным механизмом, преобразующим электрические сигналы в динамическое усилие.
2.Аэродинамические весы по п. 1, отличающиеся тем, что, с целью переноса начала координат выбранной лля отсчета системы осей в соответствии с заданной схемой действующих сил, силопреобразующая система снабжена телескопическим у:лом и передвижной кареткой.
Фиг.2
3
ФигЗ
22