Группа изобретений относится к авиационной технике и предназначена для измерения аэродинамических сил и моментов, действующих на купол планирующего парашюта (ПП) в потоке аэродинамической трубы (АДТ) при различных углах атаки и скольжения, а также для определения формы купола ПП.
Известен стенд (Nicolaides, J., "Parafoil Wind Tunnel Tests," AFFDL-TR-70-146. U.S. Air Force Flight Dynamics Lab., Wright-Patterson Air Force Base, Ohio, рисунок 8, 23) для измерения аэродинамических сил и моментов, действующих на модель купола парашюта, основным элементом которого является державка, закрепленная на основании стенда, где установлены тензовесы и балка, несущая жесткие нервюры парашюта, на которых натянуты полотнища купола парашюта.
Перемещение парашюта осуществляется только по углу атаки путем вращения установки вокруг вертикальной оси (перемещение по углу скольжения не предусмотрено). Недостатком этого устройства является то, что оно не позволяет исследовать парашют в его естественном состоянии, когда форма парашюта определяется взаимодействием нагрузок от потока аэродинамической трубы и деформаций тканей купола. Кроме того, использование жестких нервюр в модели ПП искажает реальные форму и деформации ткани ПП по хорде и размаху, что приводит к погрешностям в определении аэродинамических характеристик (АХ) парашюта.
Также известно «Устройство для испытаний планирующего парашюта в аэродинамической трубе» (Устройство для испытаний планирующего парашюта в аэродинамической трубе, а.с. СССР 699772, Башкина Л.В., Носков Г.П., Чижик В.Д.).
Устройство содержит горизонтальную продольную балку с двумя вертикальными стойками, жестко закрепленными на ней перпендикулярно ее продольной оси. На одной из стоек установлены замки крепления основных и управляющих строп планирующего парашюта. На другой стойке закреплены растяжки, с помощью которых парашют размещен параллельно горизонтальной продольной балке. Продольная горизонтальная балка с парашютом устанавливается на аэродинамических весах. При проведении испытаний устройство вместе с конструкцией весов вращается вокруг вертикальной оси, тем самым изменяя угол атаки парашюта в потоке АДТ.
Устройство имеет следующие недостатки:
1. В положении «на боку» вес парашюта уменьшает его размах, искажает форму, что приводит к погрешностям в определении АХ.
2. Для подбора необходимой длины растяжек требуются дополнительные пуски АДТ, что увеличивает время эксперимента.
3. В эксперименте изменяется только угол атаки ПП. Изменение угла скольжения не предусмотрено, то есть определяются только продольные АХ ПП.
4. Фиксация ПП растяжками большой длины при малом их количестве недостаточна - парашют смещается к балансировочному углу атаки и реальный угол атаки ПП не соответствует задаваемому поворотом весов, что также приводит к погрешностям в определении АХ.
5. В устройстве отсутствуют привода подтяга строп управления, а подтяг указанных строп вручную увеличит время эксперимента.
Также известен стенд для испытаний ПП в АДТ (Стенд для испытаний ПП в АДТ, а.с. СССР 333063, Сойнов А.И., Курышев В.В.).
Стенд содержит тензовесы, парашютную балку, привод угла атаки, пилон, фиксаторы.
К верхнему концу парашютной балки шарнирно прикреплена телескопическая продольная балка, концы которой скреплены с поперечными балками. На поперечных балках установлены фиксаторы в виде подвижных по вертикали стержней, верхние концы которых скрепляются до эксперимента с тканью нижней оболочки ПП в промежутках между стропами. Парашютная балка шарнирно крепится к тензовесам, угол атаки изменяется с помощью электропривода, изменяющего длину подкоса между парашютной балкой и тензовесами. Стенд устанавливается на верхнее строение весов АДТ. Требуемый угол скольжения ПП в потоке обеспечивается вращением конструкции весов АДТ вокруг вертикальной оси.
Однако стенд обладает следующими недостатками:
- вес фиксаторов увеличивает фактическую толщину профиля парашюта-крыла, искажая исходную форму оболочки ПП, что приводит к погрешностям при измерениях;
- тензовесы измеряют, кроме искомых аэродинамических нагрузок от ПП, значительные силы веса парашютной балки и других элементов конструкции, а также моменты от этих сил. Кроме того, весы также измеряют аэродинамические нагрузки на эти элементы стенда, находящиеся в потоке АДТ, что снижает точность измерений;
- для правильного выбора координат точек крепления фиксаторов, длины продольной балки, положения шарнира, кривизны поперечных балок нужны конструктивные доработки и дополнительные пуски АДТ, что увеличивает время подготовки, усложняет и удорожает эксперимент;
- отсутствуют приводы для строп управления;
- конструкция не универсальна: использовать данный стенд для экспериментов с ПП различной площади и арочности купола невозможно.
Указанные недостатки частично устранены в устройстве для измерения боковых аэродинамических характеристик планирующего парашюта в аэродинамической трубе (Устройство для измерения боковых аэродинамических характеристик планирующего парашюта в аэродинамической трубе. Патент Российской Федерации RU 2072947 С1, Шилов А.А., Носков Г.П., Лацоев К.Ф., Колин И.В.), выбранном в качестве прототипа, схема которого приведена в Приложении 1 (фиг. П1).
Устройство содержит две наклонные опорные балки, к верхней части которых прикреплены продольные балки, на концах которых размещаются тензовесы (двое на каждой продольной балке), поддерживающие траверсы. К траверсам с помощью коротких строп-завязок крепится нижний край концевых нервюр купола планирующего парашюта, стропы которого закреплены на нижней части наклонных опорных балок.
Устройство работает следующим образом. Стропы ПП крепят к нижней части наклонных опорных балок, с помощью вспомогательных удерживающих растяжек (на фиг. П1 не показаны) парашют вводят в поток и после выхода его на балансировочный угол атаки вспомогательные удерживающие растяжки ослабляются, а наклонные опорные балки перемещают неоговоренным способом так, чтобы траверсы были возможно ближе к нижнему краю концевых нервюр парашюта. Крепление парашюта к траверсам позволяет зафиксировать парашют в балансировочном положении и, перемещая наклонные опорные балки, изменять углы атаки и скольжения купола парашюта; силы и моменты, измеряемые тензовесами при отклонении углов атаки и скольжения от балансировочных значений, суммируются с учетом их ориентации.
Устройство имеет следующие недостатки:
1. Подбор длины коротких строп-завязок производится методом проб: длина строп-завязок должна быть минимальной и не искажать естественную форму купола. Крепление купола к траверсам в балансировочном положении, а значит - в потоке АДТ с помощью предлагаемых коротких строп-завязок, исключается по правилам техники безопасности, а после остановки АДТ парашют теряет наполненную форму. Достижение симметричного относительно оси потока крепления купола к траверсам требует нескольких (3-5) дополнительных пусков АДТ, что увеличивает время подготовки и удорожает эксперимент.
2. Устройство не универсально: из-за неизменной геометрии наклонных опорных и продольных балок и траверс на нем можно испытывать лишь ПП одного типа (близкие по размаху, хорде и длине строп).
3. Отсутствует возможность изменять длину строп управления, не прерывая эксперимент.
4. За счет деформации купола ПП при отклонении его от балансировочного положения реальные углы атаки и скольжения ПП в потоке отличаются от задаваемых конструкцией устройства, что приводит к ошибкам при определении АХ, так как реальные углы атаки и скольжения купола ПП неизвестны.
В качестве модели парашюта в испытаниях обычно используется либо реальный парашют в масштабе 1:1 (В.В. Лялин, В.И. Морозов, А.Т. Пономарев. / Парашютные системы. Проблемы и методы их решения / - М.: Физматлит, 2009 г., 575 с.; Носарев И.М. Аэродинамические исследования парашютов при различных углах атаки // Труды ЦАГИ. - 1976, - Вып. 1735. - 40 с.), либо его масштабная модель, выполненная из тех же текстильных материалов, что натурный ПП (Лебедев Н.В. Экспериментальное исследование с моделями парашютов. Труды ЦАГИ, вып. 100, 1931). В последнем случае имеют место отличия обтекания модели от обтекания реального парашюта, что приводит к погрешностям определения АХ. Однако применение традиционных моделей планирующих парашютов не позволяет определить форму и ориентацию парашюта в потоке АДТ, что приводит к ошибкам в определении АХ.
Известен способ измерения аэродинамических характеристик планирующего парашюта, заключающийся в том, что парашют (или модель) фиксируют с помощью того или иного устройства в потоке, измеряют аэродинамические нагрузки, изменяют положение в потоке и проводят повторные измерения (И.М. Носарев. Аэродинамические исследования парашютов при различных углах атаки. Труды ЦАГИ, вып. 1735, Изд. Отдел ЦАГИ, М., 1976 г.; Динамика и управление планирующих парашютов. Сборник статей. Труды ЦАГИ, вып. 2557. Изд. Отдел ЦАГИ, М., 1994 год, Патент Российской Федерации RU 2072947 С1, Шилов А.А., Носков Г.П., Лацоев К.Ф., Колин И.В.).
Однако выполнение только этих операций не обеспечивает определения формы купола и истинных углов атаки и скольжения планирующего парашюта в потоке АДТ, необходимых для правильной трактовки результатов исследований аэродинамических характеристик.
Для определения реального положения купола ПП относительно потока АДТ (углов атаки и скольжения) в экспериментах (The FAST Wing project: Wind Tunnel Tests, Realization and Results. 18-th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar AIAA 2005-1641, фиг. 3) используется следующий способ:
положение ПП в потоке измеряют с помощью двух угловых датчиков, установленных на жесткой платформе в центре нижней поверхности купола ПП, и шести инфракрасных светодиодов, закрепленных на двух антеннах, в комбинации с оптической системой измерения. Контролируют модель ПП во время испытаний с помощью видеокамер, установленных в рабочей части АДТ.
Однако в данном способе определяются положение и ориентация указанной жесткой платформы, а не купола ПП в целом, что недостаточно для правильной интерпретации результатов испытаний нежесткого ПП: из-за деформации купола его различные сечения по размаху обтекаются под разными углами атаки, отличными от угла атаки в центральном сечении. Кроме того, вес платформы искажает форму и АХ парашюта.
Основными техническими результатами настоящего изобретения являются:
1. Сокращение времени подготовки и проведения эксперимента за счет применения дистанционно управляемых механизмов фиксации ПП в балансировочном положении.
2. Снижение погрешностей в определении АХ парашюта за счет повышения точности определения углов атаки и скольжения ПП и его формы в потоке АДТ.
3. Обеспечение возможности проведения испытаний ПП различных размеров по размаху, хорде, длине строп, арочности, а также при различном положении строп управления, изменяя его в ходе эксперимента без остановки АДТ.
Технический результат изобретения достигается тем, что в устройстве для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, содержащем наклонные опорные балки, соединенные с ними продольные балки, узлы крепления строп, тензовесы и траверсы, между траверсами и продольными балками которого установлено не менее четырех тензовесов, соединение наклонных опорных балок и продольных балок выполнено шарнирным, наклонные опорные балки выполнены телескопическими с устройствами выдвижения - уборки и с шарнирами углов развала, атаки и скольжения, и устройство содержит дистанционно управляемый привод изменения угла развала наклонных опорных балок, а в узлах крепления строп размещены устройства подтяга строп управления. Шарнирное соединение наклонных опорных балок и продольных балок выполнено в виде шарниров рысканья, тангажа и крена, причем шарниры крена снабжены дистанционно управляемыми приводами. На траверсах установлены механизмы фиксации строп парашюта, выполненные в виде расположенных вдоль траверс параллельных между собой или V-образных пар стержней, при этом в каждой паре один из стержней закреплен на траверсе неподвижно, а второй выполнен подвижным, и все подвижные стержни связаны общим дистанционно управляемым приводным механизмом.
Либо на траверсах установлены мехенизмы фиксации концевых нервюр парашюта в виде параллелограмных механизмов, выполненные в виде прижимов фиксирующих лент парашюта. Механизмы фиксации содержат дистанционно управляемые приводы.
Технический результат также достигается использованием совместно с предлагаемым устройством модели планирующего парашюта для испытаний в АДТ, на поверхностях которой нанесены контрастные или светоотражающие маркеры для наблюдения методом видеограмметрии, а к концевым нервюрам присоединены фиксирующие ленты.
Технический результат также достигается применением способа измерения аэродинамических характеристик планирующего парашюта в АДТ с использованием предлагаемых устройства и модели ПП, включающего фиксацию модели парашюта на предлагаемом устройстве, мониторинг и измерение аэродинамических нагрузок в различных положениях парашюта в потоке, отличающийся тем, что мониторинг осуществляется видеограмметрическим методом, включающим видеосъемку испытаний модели парашюта, при этом видеокамеры устанавливаются так, чтобы каждый маркер, нанесенный на поверхность модели, был виден не менее чем с двух видеокамер.
Изобретение поясняется следующими чертежами.
На фиг. 1 приведена схема устройства (вид по потоку АДТ).
На фиг. 2 - схема устройства (вид сбоку).
На фиг. 3 - механизм фиксации концевых нервюр ПП (вариант 1).
На фиг. 4 - механизм фиксации концевых нервюр ПП (вариант 2).
На фиг. П1 Приложения 1 представлено устройство для измерения боковых аэродинамических характеристик планирующего парашюта в аэродинамической трубе, принятое в качестве прототипа.
Заявляемое устройство содержит основание 9, две наклонные опорные балки 18 с продольными балками 5, верхними тензовесами 4 и траверсами 3 (фиг. 1, 2). Наклонные опорные балки 18 выполнены телескопическими и снабжены механизмами выдвижения-уборки 10. Продольные балки 5 присоединены к наклонным опорным балкам 18 посредством шарниров: рыскания 17, тангажа 16 и крена 13. К верхней части каждой наклонной опорной балки 18 присоединен дистанционно управляемый привод 14 шарнира крена, соединенный с продольной балкой 5. Наклонные опорные балки 18 через шарнир угла атаки 19 соединены с силовой стойкой 20, к которой через нижние тензовесы 21 крепится платформа 23 с узлами 22 крепления основных строп 27 купола 1 ПП и с дистанционно управляемыми устройствами 8 подтяга строп управления 26. Наклонные опорные балки 18 устанавливаются под различными углами атаки и скольжения с помощью приводов 25 и 24 соответственно. Наклонные опорные балки 18 соединены шарнирно подкосами 7 с дистанционно управляемым приводом 6 изменения угла развала наклонных опорных балок, установленным в верхней части силовой стойки 20. На каждой траверсе 3 размещен механизм фиксации 2 концевой нервюры 15 купола 1, левой или правой.
Механизм фиксации 2 концевой нервюры 15 купола 1 может быть выполнен в двух вариантах:
1) в виде расположенных вдоль каждой траверсы 3 стержней 28, параллельных или V-образных, расположенных под углом друг к другу, неподвижных и подвижных, соединенных с дистанционно управляемым приводным механизмом 12 фиксации концевых нервюр 15, закрепленным на траверсе 3 (фиг. 3). Для изменения ориентации стержней 28 по углу крена одновременно с верхними тензовесами 4 служат дистанционно управляемые приводы 14 шарниров крена, закрепленные в верхней части наклонных опорных балок 18;
2) в виде параллелограммного механизма, состоящего из прижима 30, соединенного с траверсой 3 шарнирно прикрепленными к ней накладками 31 (фиг. 4). Прижимы 30 соединены шарнирно с дистанционно управляемыми приводными механизмами 12 фиксации концевых нервюр 15, установленными на траверсах 3. Через щели между траверсами 3 и прижимами 30 пропущены фиксирующие ленты 29, каждая из которых закреплена одним концом на концевой нервюре 15 купола 1, а их вторые концы пропущены через блоки (кольца) 33, установленные на наклонных опорных балках 18, и закреплены со слабиной концевыми зажимами 32 в нижней части наклонных опорных балок 18. В качестве блоков 33 могут использоваться кольца (фиг. 4).
Для использования совместно с вышеописанным устройством модель ПП для испытаний в АДТ, которая представляет собой уменьшенную копию реального парашюта, выполненную из того же материала, что и реальный парашют (или реальный парашют, если размеры рабочей части трубы допускают его размещение без чрезмерного загромождения потока), снабжена маркерами, например, из контрастной или светоотражающей ткани для определения формы и ориентации купола ПП в потоке АДТ на его поверхностях (нижней, верхней, боковой) в характерных точках. К концевым нервюрам 15 прикрепляются (во втором варианте исполнения механизма фиксации 2) фиксирующие ленты 29 (фиг. 4), количество которых выбирается достаточным для крепления ПП.
Измерения АХ планирующего парашюта в аэродинамической трубе с использованием вышеупомянутого устройства и модели ПП выполняются следующим образом:
в рабочей части АДТ размещают видеокамеры, их количество и месторасположение выбирают из условия, чтобы каждый маркер на ПП был виден как минимум с двух видеокамер (условие для применения метода видеограмметрии). Проводят калибровку видеокамер с помощью видеосъемки калибровочного полотна, располагаемого в области предполагаемого расположения ПП в АДТ во время испытаний. Затем калибровочное полотно снимают.
Основные стропы 27 ПП подсоединяются к узлам крепления 22, а стропы управления 26 - к дистанционно управляемым устройствам 8 их подтяга, наклонные опорные балки 18 разводятся на максимальное расстояние дистанционно управляемым приводом 6 изменения угла развала, АДТ запускается, с помощью удерживающих вспомогательных растяжек (не показаны) купол 1 ПП вводится в поток.
После наполнения купола 1 и выхода ПП на его балансировочный угол атаки осуществляется его видеосъемка синхронно всеми видеокамерами. Последующая обработка данных видеосъемки дает: размах и хорду купола 1 в потоке АДТ, положение купола 1 (в том числе - концевых нервюр 15) относительно узлов крепления 22 основных строп 27. По этим данным после остановки АДТ регулируется геометрия устройства: длина (механизмами выдвижения-уборки 10) и развал (дистанционно управляемым приводом 6 изменения угла развала) наклонных опорных балок 18, положение траверс 3. Траверсы 3 должны быть параллельны хордам концевых нервюр 15 парашюта в его балансировочном положении.
С помощью дистанционно управляемого привода 14 шарнира крена обеспечивают перпендикулярность плоскости стержней 28 (в 1-м варианте фиксации) и плоскости, образуемой основными стропами 27 концевых нервюр 15 купола 1.
Для 2-го варианта фиксации ориентация прижима 30 фиксирующих лент 29 на каждой продольной балке 5 выбирается такой, чтобы плоскости накладок 31 были перпендикулярны фиксирующим лентам 29 в их натянутом состоянии, для этого используется дистанционно управляемый привод 14 шарнира крена (фиг. 4).
В 1-м варианте фиксации с помощью дистанционно управляемого привода 6 изменения угла развала наклонных опорных балок 18 подводят траверсы 3 с раздвинутыми стержнями 28 к нижнему краю концевых нервюр 15 парашюта так, чтобы основные стропы 27 концевых нервюр 15 купола 1 вблизи их крепления к концевым нервюрам 15 вошли в промежутки между подвижными и неподвижными стержнями 28 механизмов фиксации (фиг. 3). С помощью дистанционно управляемых приводных механизмов 12 фиксации стержни 28 зажимают основные стропы 27 вблизи концевых нервюр 15 парашюта, находящегося в балансировочном положении. Проверяется корректность фиксации парашюта по отсутствию дополнительных нагрузок на верхних тензовесах 4 и моментов тангажа, крена и рыскания на нижних тензовесах 21. Далее с помощью приводов 24 и 25 изменяют соответственно угол скольжения и угол атаки купола 1 ПП, а с помощью дистанционно управляемых устройств 8 подтяга строп управления - длину строп управления 26 в соответствии с программой испытаний, измеряя нагрузки тензовесами 4 и 21. Одновременно в процессе испытаний проводится видеосъемка купола 1 парашюта синхронно всеми видеокамерами, установленными в рабочей части АДТ.
Во 2-м варианте фиксации (фиг. 4) перед экспериментом фиксирующие ленты 29, соединенные предварительно с концевыми нервюрами 15 купола 1 парашюта, пропускаются в раскрытые щели между траверсами 3 и прижимами 30, далее они пропускаются через блоки (или кольца) 33 на наклонных опорных балках 18 и закрепляются концевыми зажимами 32. Основные стропы 27 парашюта закрепляют в узлах 22. Далее запускается АДТ, аналогично вышеописанному парашют вводится в поток и устанавливается в балансировочном положении. Наклонные опорные балки 18 сдвигаются с помощью дистанционно управляемого привода изменения угла развала 6, при этом слабина фиксирующих лент 29 выбирается оператором так, чтобы не было ни провисания фиксирующих лент 29, ни деформации ими концевых нервюр 15 купола 1 в точках закрепления фиксирующих лент 29. Траверсы 3 с прижимами 30 подводятся на минимальное расстояние к концевым нервюрам 15 парашюта. С помощью дистанционно управляемых приводных механизмов 12 фиксации щели между прижимами 30 и траверсами 3 ликвидируются, при этом фиксирующие ленты 29 закрепляются прижимами 30 на траверсах 3. Концы фиксирующих лент 29 зажимают концевыми зажимами 32 так, чтобы имелась слабина фиксирующих лент 29. Купол 1 парашюта фиксируется на устройстве в балансировочном положении в потоке АДТ.
Аналогично вышеописанному по показаниям верхних 4 и нижних 21 тензовесов проверяется корректность фиксации купола 1 парашюта.
По завершении программы испытаний с помощью специального программного обеспечения выполняется обработка видеоматериалов, результат которой - реальная форма и ориентация парашюта в потоке АДТ в процессе экспериментов, что позволяет корректно соотнести полученные измерения аэродинамических нагрузок на парашют условиям его реального обтекания потоком.
Предложены новый способ аэродинамических исследований планирующих парашютов в АДТ, объединяющий весовой эксперимент и видеограмметрический метод, и обеспечивающий его реализацию инструментарий - совокупность технических и программных средств для проведения испытаний и обработки результатов.
Разработана методика определения формы и положения парашюта в потоке АДТ путем измерения трехмерных координат маркеров на нижней и верхней поверхности купола с помощью многоканального видеоизображения (методом видеограмметрии).

Приложение 1
На фиг. П1 представлена схема выбранного в качестве прототипа устройства для измерения боковых аэродинамических характеристик планирующего парашюта в аэродинамической трубе.
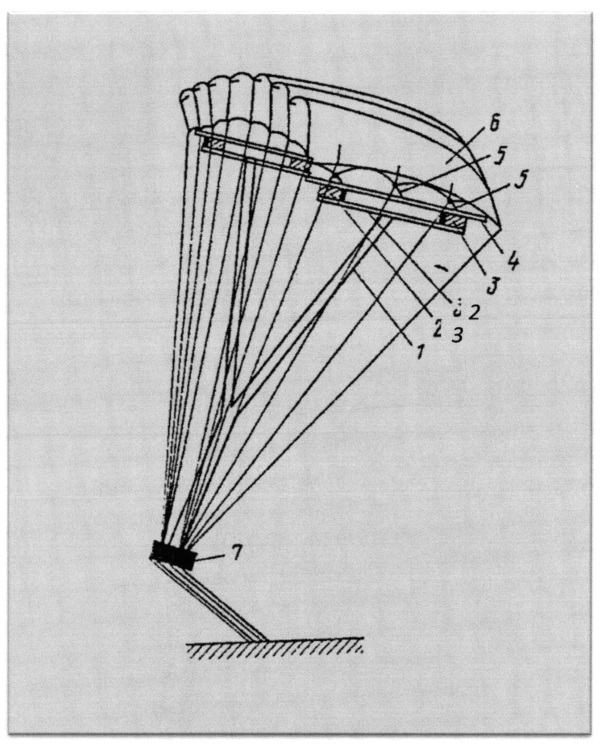
Фиг. П1. Устройство для измерения боковых аэродинамических характеристик планирующего парашюта в аэродинамической трубе [4]:
1 - наклонная опорная балка; 2 - продольная балка; 3 – тензовесы; 4 – траверса; 5 - стропы-завязки; 6 – парашют; 7 - устройство крепления строп парашюта
Устройство содержит две наклонные опорные балки 1, на верхней части которых закреплены продольные балки 2, на концах которых размещаются тензовесы 3 (не менее двух на каждой балке), поддерживающие траверсы 4. К траверсам 4 с помощью коротких строп-завязок 5 крепится нижний край концевых нервюр купола планирующего парашюта 6, силовые стропы которого укреплены на нижней части опорных балок 1 с помощью устройства 7.


Изобретение относится к авиационной технике и предназначено для измерения аэродинамических сил и моментов, действующих на купол планирующего парашюта (ПП) в потоке аэродинамической трубы (АДТ) при различных углах атаки и скольжения. Устройство используется следующим образом. После ввода в поток модель парашюта фиксируется в потоке АДТ в балансировочном положении с помощью предлагаемого устройства. Качество фиксации контролируется по показаниям измерений тензовесов и данным обработки видеосъемки и, при необходимости, корректируется. Перемещение модели парашюта в потоке и подтяг строп управления осуществляются с помощью дистанционно управляемых приводов. В процессе испытаний одновременно с измерением тензовесами аэродинамических нагрузок осуществляется синхронная видеосъемка модели парашюта с помощью видеокамер, расположенных в рабочей части АДТ, количество которых выбирается так, чтобы каждый маркер, нанесенный на поверхность модели, был виден не менее чем с двух видеокамер. По завершении программы испытаний измерения аэродинамических нагрузок на парашют соотносятся с реальными условиям его обтекания (углами атаки и скольжения), полученными путем обработки данных видеосъемки. Технический результат заключается в сокращении времени подготовки и проведения эксперимента, снижении погрешностей в определении аэродинамических характеристик парашюта, обеспечении возможности проведения испытаний ПП различных размеров, а также при различном положении строп управления, меняя его в ходе эксперимента без остановки АДТ. 3 н. и 5 з.п. ф-лы, 4 ил. 
1. Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, содержащее наклонные опорные балки, соединенные с ними продольные балки, узлы крепления строп, тензовесы и траверсы, отличающееся тем, что соединение наклонных опорных балок и продольных балок выполнено шарнирным, наклонные опорные балки выполнены телескопическими с устройствами выдвижения-уборки и с шарнирами углов развала, атаки и скольжения и оно снабжено дистанционно управляемым приводом изменения угла развала наклонных опорных балок.
2. Устройство по п. 1, отличающееся тем, что в узлах крепления строп размещены устройства подтяга строп управления.
3. Устройство по п. 1 или 2, отличающееся тем, что шарнирное соединение наклонных опорных балок и продольных балок выполнено в виде шарниров рыскания, тангажа и крена, причем шарниры крена снабжены дистанционно управляемыми приводами.
4. Устройство по п. 1, отличающееся тем, что на траверсах установлены механизмы фиксации строп парашюта, выполненные в виде расположенных вдоль траверс параллельных между собой или V-образных пар стержней, при этом в каждой паре один из стержней закреплен на траверсе неподвижно, а второй выполнен подвижным, и все подвижные стержни связаны общим кинематическим приводным механизмом.
5. Устройство по п. 1, отличающееся тем, что на траверсах установлены механизмы фиксации концевых нервюр парашюта в виде параллелограммных механизмов, выполненные в виде прижимов фиксирующих лент парашюта.
6. Устройство по п. 4 или 5, отличающееся тем, что механизмы фиксации содержат дистанционно управляемые приводы.
7. Модель планирующего парашюта для испытаний в аэродинамической трубе совместно с устройством по пп. 1-6, отличающаяся тем, что на ее поверхностях нанесены контрастные или светоотражающие маркеры, а к концевым нервюрам присоединены фиксирующие ленты.
8. Способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, включающий фиксацию модели парашюта по п. 7 на устройстве по пп. 1-6, мониторинг и измерение аэродинамических нагрузок в различных положениях парашюта в потоке, отличающийся тем, что мониторинг осуществляется видеограмметрическим методом, включающим видеосъемку испытаний модели парашюта, при этом видеокамеры устанавливаются так, чтобы каждый маркер, нанесенный на поверхность модели, был виден не менее чем с двух видеокамер.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОКОВЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1993 |
|
RU2072947C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА | 1993 |
|
RU2061629C1 |
| Носарев И.М | |||
| Аэродинамические исследования парашютов при различных углах атаки // Труды ЦАГИ | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| - Вып | |||
| Котел для получения парогазовой смеси | 1922 |
|
SU1735A1 |
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| The FAST Wing project: Wind Tunnel Tests, Realization and Results | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |

