Изобретение относится к области экспериментальной аэродинамики летательных аппаратов.
Важность определения статических и нестационарных аэродинамических производных летательных аппаратов в широком диапазоне углов атаки и скольжения обусловлена, прежде всего, необходимостью обеспечения безопасности эксплуатации самолета, в частности предотвращением возникновения сваливания самолета и попадания его в штопор. По мировой статистике, более половины аварий и катастроф происходит именно по этой причине (Авиация общего назначения. Рекомендации для конструкторов. Под ред. д.т.н. проф. В.Г. Микеладзе, М., ЦАГИ, 2001, с.213).
Из существующего уровня техники известен способ определения статических и нестационарных аэродинамических производных моделей летательных аппаратов в аэродинамической трубе методом вынужденных колебаний, при котором модель посредством тензовесов и державки устанавливают в подвижное поддерживающее устройство, модель колеблют с фиксированной частотой и малой амплитудой поочередно относительно связанных осей Ox, Oy и Oz, измеряют во времени действующие на модель аэродинамические нагрузки и ее угловое положение (Г.С. Бюшгенс, Р.В. Студнев, Аэродинамика самолета. Динамика продольного и бокового движения. М., Машиностроение, 1979, с.32-34). Недостатком данного способа является невозможность определения продольных статических и нестационарных аэродинамических производных моделей летательных аппаратов и характеристик рыскания при углах скольжения, не равных нулю, в случае, если угол атаки модели не равен нулю, а также характеристик крена при углах скольжения, не равных нулю, во всем диапазоне углов атаки модели.
Наиболее близким к заявленному техническому решению является способ определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, при котором испытания проводят как в потоке, так и без потока в аэродинамической трубе, модель посредством тензовесов и державки устанавливают в подвижное поддерживающее устройство, модель колеблют с фиксированной частотой и малой амплитудой поочередно относительно осей Ox, Oy и Oz, измеряют во времени действующие на модель нагрузки и ее угловое положение, производят вычитание инерционных и весовых нагрузок, а затем производят вычисления статических и комплексов нестационарных и вращательных аэродинамических производных (Экспериментальные исследования и математическое моделирование нестационарных аэродинамических характеристик моделей самолетов. Труды ЦАГИ - сборник статей. М., 2010 г., выпуск 2689, с.5-6). Недостатком указанного способа является то, что он также не позволяет определить статические и нестационарные аэродинамические производные моделей летательных аппаратов при углах скольжения, отличных от нуля.
Из существующего уровня техники также известно устройство для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, содержащее поворотный круг в рабочей части аэродинамической трубы, стойку на поворотном круге, державку модели с тензовесами, смонтированную в подшипниковом узле стойки, привод, связанный тягой с державкой, датчик угла поворота державки (Г.С. Бюшгенс, Р.В. Студнев, Аэродинамика самолета. Динамика продольного и бокового движения. М., Машиностроение, 1979, с.32-34). Недостатком описанного устройства является невозможность проведения испытаний при колебаниях модели в продольном канале и по рысканию при углах скольжения, не равных нулю, в случае, если угол атаки модели не равен нулю, а также отсутствие возможности проведения испытаний при углах скольжения, не равных нулю, во всем диапазоне углов атаки модели при ее колебаниях по крену.
Наиболее близким к заявленному техническому решению является устройство для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, содержащее поворотный круг в рабочей части аэродинамической трубы, стойку на поворотном круге, подвижную Г-образную раму, державку модели с тензовесами, смонтированную в подшипниковом узле рамы, привод, связанный тягами с рамой и державкой, датчики угла поворота рамы и державки (Экспериментальные исследования и математическое моделирование нестационарных аэродинамических характеристик моделей самолетов. Труды ЦАГИ - сборник статей. М., 2010 г., выпуск 2689, с.5-6). Недостатком этого устройства является то, что оно также не позволяет проводить испытания по определению статических и нестационарных аэродинамических производных моделей летательных аппаратов при углах скольжения, отличных от нуля.
Задачей и техническим результатом изобретения является создание способа и устройства для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов при наличии угла скольжения во всем диапазоне углов атаки, что увеличивает безопасность эксплуатации самолета, в частности, позволяет предотвратить возникновение сваливания самолета и попадание его в штопор.
Решение поставленной задачи и технический результат достигаются тем, что в способе определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, заключающемся в том, что испытания проводят как в потоке, так и без потока в аэродинамической трубе, модель посредством тензовесов и державки устанавливают в подвижное поддерживающее устройство, модель колеблют с фиксированной частотой и малой амплитудой поочередно относительно осей Ox, Oy и Oz, измеряют во времени действующие на модель нагрузки и ее угловое положение, производят вычитание инерционных и весовых нагрузок, в процессе испытаний модель вместе с державкой и тензовесами поворачивают на фиксированные углы крена, результаты эксперимента при колебаниях относительно осей Oy и Oz обрабатывают совместно, при этом значения статических и нестационарных аэродинамических производных определяют по формулам




где C=Cy, Cx, mx, my или mz, Cα - статическая производная аэродинамического коэффициента от угла атаки, Cβ - статическая производная аэродинамического коэффициента от угла скольжения, 





Решение поставленной задачи и технический результат достигаются также тем, что в устройство для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, содержащее поворотный круг в рабочей части аэродинамической трубы, стойку на поворотном круге, подвижную Г-образную раму, державку модели с тензовесами, смонтированную в подшипниковом узле рамы, привод, связанный тягами с рамой и державкой, датчики угла поворота рамы и державки, введен механизм дистанционной установки державки, состоящий из корпуса, установленного на подшипниковом узле рамы посредством подшипников, электрического мотор-редуктора и выходного вала с упругим диском-шестерней, установленных соосно державке и соединенных с ее свободным концом, пневмотормоза диска, установленного в корпусе и охватывающего упругий диск-шестерню, дополнительного датчика угла установки державки по крену, который вынесен от оси державки и связан с диском-шестерней, рычага-зажима, установленного на наружной поверхности корпуса механизма с возможностью фиксации корпуса относительно рамы и соединения тягой с приводом.
Сущность предложенных способа и устройства для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов поясняется на фиг.1-6, на которых представлены:
на фиг.1 - схема проведения испытаний для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов при колебаниях относительно различных связанных осей;
на фиг.2 - схема заявляемого устройства для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов;
на фиг.3 - схема механизма для дистанционной установки державки под заданным углом крена;
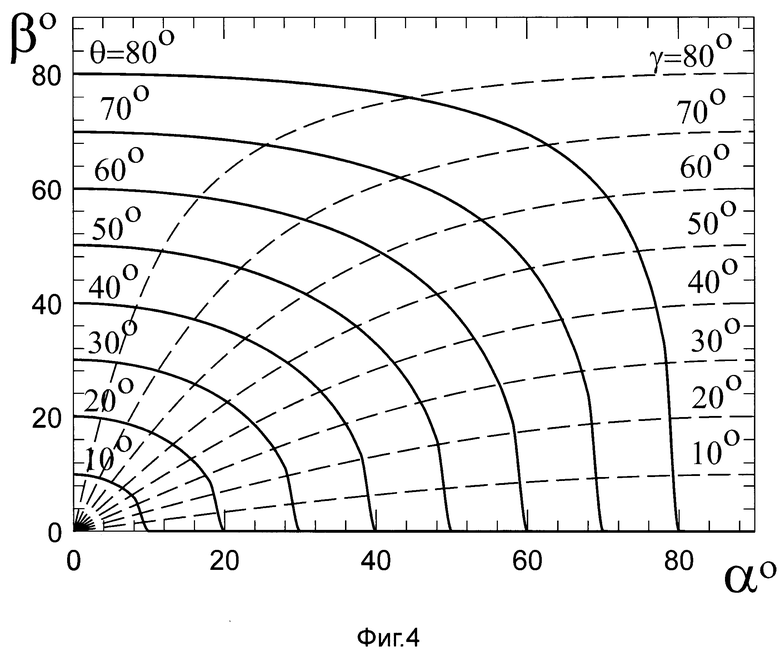
на фиг.4 - график зависимостей углов атаки α и скольжения β от угла поворота круга в рабочей части аэродинамической трубы θ и угла крена державки γ;
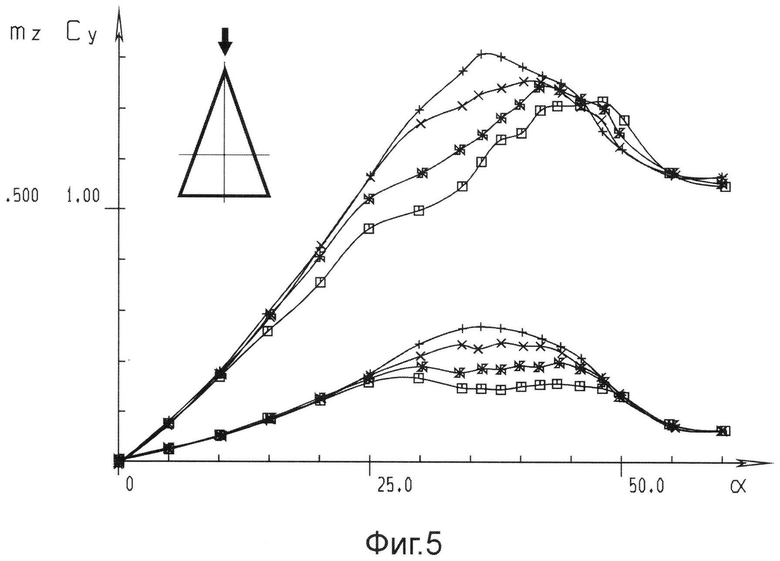
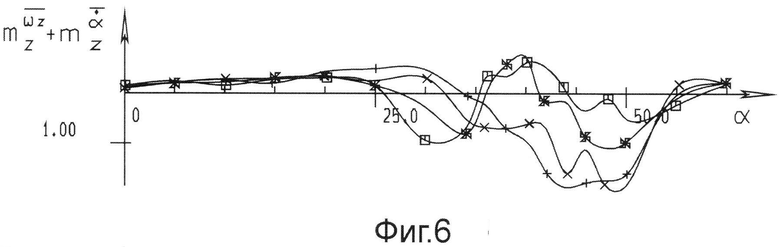
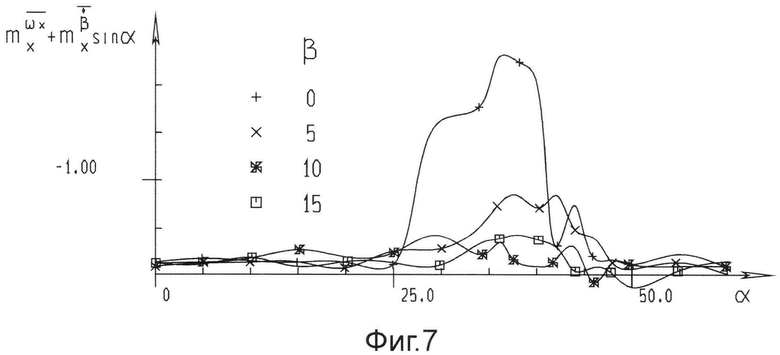
на фиг.5, 6, 7 - графики зависимостей статических и нестационарных аэродинамических производных модели треугольного крыла от угла атаки для различных значений угла скольжения.
Перечень используемых позиций в описании изобретения.
1. Поворотный круг в рабочей части аэродинамической трубы.
2. Подвижная Г-образная рама.
3. Стойка.
4. Тяга.
5. Привод.
6. Державка.
7. Тензовесы.
8. Механизм дистанционной установки державки.
9. Модель летательного аппарата.
10. Датчик угла поворота рамы.
11. Подшипниковый узел рамы.
12. Выходной вал.
13. Электрический мотор-редуктор.
14. Упругий диск-шестерня.
15. Датчик угла установки державки по крену.
16. Корпус.
17. Пневмотормоз диска.
18. Подшипник.
19. Рычаг-зажим.
20. Датчик угла поворота державки.
Способ определения статических и нестационарных аэродинамических производных моделей летательных аппаратов заключается в том, что испытания проводят как в потоке, так и без потока в аэродинамической трубе, модель посредством тензовесов и державки устанавливают в подвижное поддерживающее устройство, модель колеблют с фиксированной частотой и малой амплитудой поочередно относительно осей Ox, Oy и Oz, измеряют во времени действующие на модель нагрузки и ее угловое положение, производят вычитание инерционных и весовых нагрузок. Для этого устройство последовательно собирают в конфигурации для проведения исследований производных модели при ее колебаниях относительно одной из связанных осей (фиг.1). Модель летательного аппарата 9 устанавливают в подвижное поддерживающее устройство - державку 8 с тензовесами 7 (фиг.2). При помощи механизма дистанционной установки державки 8 модель поворачивают на фиксированный угол крена γi, при помощи поворотного круга в рабочей части аэродинамической трубы 1 модель 9 устанавливают под углом θi к оси потока аэродинамической трубы (фиг.2). Привод 5 настраивают на нужные величины амплитуды А и круговой частоты ω и колеблют подвижную Г-образную раму 2 по гармоническому закону

Величина амплитуды колебаний является малой и равна 2÷3°. Без потока в аэродинамической трубе в течение шестнадцати периодов колебаний производят измерение тензовесами 7 и запись пяти компонент нагрузок, действующих на модель Y, Z, Mx, My, Mz, а также показаний датчиков угла поворота державки 20 и рамы 10. Исследования проводят для нескольких значений углов θi. Определяют значение инерционных и весовых нагрузок. Затем включают поток в аэродинамической трубе и указанные операции повторяют. Из нагрузок, полученных в потоке, вычитают инерционные и весовые нагрузки. Затем получают зависимости статических и нестационарных аэродинамических производных модели с использованием алгоритма, описанного ниже.
Для проведения испытаний при заданных средних значениях угла атаки αi и скольжения βi модель необходимо устанавливать под соответствующими углами γi и θi. Связь между величинами указанных углов описывается системой уравнений

При решении этой системы уравнений получают требуемые значения углов поворота круга θi и державки γi для заданных значений углов атаки и скольжения по следующим формулам
Графически приведенные зависимости представлены на фиг.4. При проведении исследований необходимые значения углов θ и γ по заданным углам α и β рассчитывают в реальном времени на компьютере.
При повороте модели с тензовесами по крену при колебаниях по тангажу и рысканию угловая скорость вращения модели имеет проекцию одновременно на две оси связанной системы координат модели - ωz и ωy (фиг.2). В связи с этим, результаты эксперимента при колебаниях относительно осей Oy и Oz обрабатывают совместно - только одновременная обработка результатов колебаний по тангажу и рысканию с последующим решением соответствующей линейной системы уравнений позволяет получить требуемые зависимости статических и нестационарных аэродинамических производных модели.
Рассмотрим малые колебания модели по тангажу. Пусть угол поворота рамы установки изменяется по закону

Где ∈0<<1 - амплитуда колебаний, ω=2πf - частота. Тогда малые изменения углов атаки и скольжения модели относительно средних значений можно представить формулами

Компоненты угловой скорости движения модели можно выразить следующим образом:

где 
Следовательно, при наличии поворота модели по углу крена при колебаниях по тангажу в связанной системе координат возникают угловые скорости вращения модели ωy и ωz, в отличие от случая γ=0, когда ωy=0.
Выражения для производных по времени углов атаки и скольжения можно найти с помощью кинематических соотношений:

С учетом (6), можно получить

Следовательно, в линейном приближении, с учетом (5), (6) и (8), при колебаниях по тангажу аэродинамические коэффициенты можно представить в следующем виде
где C=Cy, Cz, mx, my или mz.
Таким образом, каждый канал тензовесов при малых колебаниях по тангажу воспринимает некоторое среднее значение C0 и сигналы в фазе с опорным сигналом Δθ(t) и в фазе с сигналом Ω(t)=Δθ(t). Составляющая сигнала в фазе с опорным сигналом пропорциональна

Составляющая сигнала в фазе с угловой скоростью (опережение по фазе на π/2 выражается следующим образом

Таким образом, при γ
Проанализируем теперь кинематику модели при колебаниях по рысканию. В этом случае рама установки повернута так, что бы ее колебания изменяли угол рыскания модели. При этом ее малые колебания (4) приводят к следующим изменениям мгновенных значений углов атаки и скольжения относительно средних значений, определяемых выражением (2)

Компоненты угловой скорости имеют следующий вид

Выражения для производных от углов атаки и скольжения в случае колебаний по рысканию определяются из вышеприведенных формул (12) с учетом кинематических соотношений (7):

В линейном приближении коэффициенты сил и моментов, действующих на модель при колебаниях по рысканию, с учетом (11), (12) и (13) можно представить в виде:
Таким образом, по аналогии со случаем колебаний по тангажу, при малых колебаниях по рысканию каждый канал тензовесов также воспринимает некоторое среднее значение C0 и сигналы в фазе с опорным сигналом Δθ(t) и в фазе с сигналом Ω(t)=Δθ(t):

С учетом выражений (9) и (14,) решая систему уравнений для нахождения производных Cα и Cβ, получим

где Cα - статическая производная аэродинамического коэффициента от угла атаки, Cβ - статическая производная аэродинамического коэффициента от угла скольжения, 



Аналогично, с учетом выражений (10) и (15), можно найти комплексы производных

В этом выражении 



Обрабатывая совместно результаты эксперимента при колебаниях по тангажу и рысканию, можно найти все необходимые комплексы стационарных и нестационарных производных при заданных средних значениях углов атаки и скольжения.
При колебаниях по крену для установочного угла γ≠0 отлична от нуля только одна компонента угловой скорости движения модели так же, как и в случае γ=0

Т.е. для таких колебаний начальный поворот на некоторый постоянный угол крена не приводит к дополнительным взаимосвязям между комплексами аэродинамических производных.
Выражения для производных углов атаки и скольжения имеют вид

Следовательно, в случае малых колебаний модели по крену коэффициент пропорциональности 

Поэтому исследовать зависимость демпфирования крена от угла скольжения можно, не решая дополнительных систем линейных уравнений.
Предлагаемый способ реализуется при помощи устройства для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, собираемого в одном из трех вариантов для колебаний модели относительно одной из связанных осей (фиг.1). Устройство содержит поворотный круг 1 в рабочей части аэродинамической трубы (фиг.2), стойку 3 на поворотном круге, подвижную Г-образную раму 2, державку 6 модели с тензовесами 7, смонтированную в подшипниковом узле рамы 11, привод 5, связанный тягами 4 с рамой или державкой (в зависимости от конфигурации устройства), датчики угла поворота рамы 10 и державки 6. При колебаниях модели по тангажу Г-образная рама 2 устанавливается в вертикальной плоскости (фиг.1), при колебаниях по рысканию подвижная Г-образная рама 2 переводится в горизонтальное положение, при этом используется стойка 3 большей высоты. При колебаниях модели по крену тяга от привода крепится не к Г-образной раме 2, а к рычагу-зажиму 19 механизма 8. Для дистанционно управляемого поворота державки на заданный угол крена в устройстве использован механизм дистанционной установки державки 8, состоящий из корпуса 16, установленного на подшипниковом узле рамы 11 посредством подшипников 18 (фиг.3), электрического мотор-редуктора 13 и выходного вала 12 с упругим диском-шестерней 14, установленных соосно державке 6 и соединенных с ее свободным концом, пневмотормоза диска 17, установленного в корпусе и охватывающего упругий диск-шестерню, дополнительного датчика угла установки державки по крену 15, который вынесен от оси державки и связан с диском-шестерней, рычага-зажима 19, установленного на наружной поверхности корпуса механизма с возможностью фиксации корпуса относительно рамы и соединения тягой с приводом. Дополнительный датчик угла установки державки по крену 15 служит для измерения угла поворота державки 6 относительно корпуса 16.
Работает устройство следующим образом. Устройство собирают в нужной конфигурации для проведения исследований аэродинамических производных модели при ее колебаниях относительно одной из связанных осей (фиг.1). При проведении испытаний по тангажу и рысканию привод 5 посредством тяги 4 заставляет подвижную Г-образную раму 2 совершать гармонические периодические колебания с заданной малой амплитудой и частотой относительно оси стойки 3. Корпус механизма 8 зафиксирован относительно подшипникового узла рамы 11 рычагом-зажимом 19. При этом модель летательного аппарата 9, закрепленная на державке 6 и тензовесах 7, также совершает колебания относительно оси стойки. При проведении испытаний по крену подвижная Г-образная рама 2 фиксируется относительно стойки 3. Корпус механизма 8 освобождается и соединяется при помощи тяги 4 и рычага-зажима 19 с приводом 5. В этом случае модель 9 с тензовесами 7 и державкой 6 колеблется относительно оси державки. Для поворота модели на угол θi используется поворотный круг 1, для поворота державки на угол γi служит механизм дистанционной установки державки 8. Силы и моменты, действующие на модель, измеряются при помощи тензовесов 7. Поворот рамы устройства измеряется датчиком угла 10, угол поворота державки - датчиком 20. Поворот державки 6 с моделью 9 на необходимый угол крена осуществляется механизмом 8. При этом сначала пневмотормоз 17 отключается и разблокирует диск-шестерню 14 относительно корпуса 16. Включается электрический мотор-редуктор 13 и вращает державку 6 через выходной вал 12. При этом угол установки державки по крену измеряется датчиком 15. При достижении державкой нужного угла установки мотор-редуктор 13 выключается, на пневмотормоз 17 подается сжатый воздух, он блокирует диск-шестерню 14, фиксируя державку 6 от проворачивания относительно корпуса механизма 16. Рычаг-зажим 19 в случае колебаний модели по тангажу и рысканию смещается так, что он при затяжке одновременно обжимает наружные поверхности корпуса механизма 16 и подшипникового узла рамы 11, жестко фиксируя их между собой. При колебаниях модели по крену рычаг-зажим 19 сдвигается полностью на корпус 16 и зажимается на нем. К рычагу присоединяется тяга 4 от привода 5. При этом механизм 8, поворачиваясь на подшипниках 18 относительно рамы 2, передает малые угловые колебания державке 6.
Таким образом, достигается ожидаемый технический результат, а именно становится возможным проводить испытания по определению статических и нестационарных аэродинамических производных моделей летательных аппаратов при углах скольжения, отличных от нуля во всем диапазоне углов атаки.
Предлагаемые способ и устройство для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов были использованы при испытании модели треугольного крыла удлинением λ=1.5 со стреловидностью χ≈70° и корневой хордой ba=1,2 м при скорости потока V∞=25 м/с, что соответствует числу Рейнольдса Re=2.0·106 по корневой хорде. Центр колебаний модели располагался в точке χT - 0.5 ba. Эксперименты проводились в диапазоне углов атаки α=0÷60° для углов скольжения β=0, 5, 10 и 15°. Амплитуда колебаний составляла Δθ=3°, частота f=1.5 Гц, что соответствует безразмерной круговой частоте 

Таким образом, показано, что данное техническое решение позволяет определять статические и нестационарные аэродинамические производные моделей летательных аппаратов при наличии угла скольжения во всем диапазоне углов атаки. Это увеличивает безопасность эксплуатации самолета, в частности позволяет предотвратить возникновение сваливания самолета и попадание его в штопор.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ ПРИ УСТАНОВИВШЕМСЯ ВРАЩЕНИИ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2477460C1 |
| Устройство для исследования нестационарных аэродинамических характеристик модели в аэродинамической трубе | 2019 |
|
RU2717748C1 |
| УСТРОЙСТВО ДЛЯ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ КОМПЛЕКСОВ ВРАЩАТЕЛЬНЫХ И НЕСТАЦИОНАРНЫХ ПРОИЗВОДНЫХ | 2010 |
|
RU2441214C1 |
| Устройство для испытаний моделей летательных аппаратов в аэродинамических трубах | 2017 |
|
RU2685576C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 2013 |
|
RU2539763C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2510618C2 |
| УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК СВАЛИВАНИЯ И ШТОПОРА САМОЛЕТА (ВАРИАНТЫ) | 2005 |
|
RU2297364C1 |
| Электромеханический стенд | 2020 |
|
RU2736347C1 |
| СПОСОБ ЗАПУСКА ДВУХСТУПЕНЧАТОЙ УПРАВЛЯЕМОЙ РАКЕТЫ С ВОЗДУШНОГО НОСИТЕЛЯ | 2006 |
|
RU2321825C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2331892C2 |
Изобретения относятся к области экспериментальной аэродинамики летательных аппаратов и могут быть использованы для определения статических и нестационарных аэродинамических производных моделей летательных аппаратов в аэродинамической трубе. Способ заключается в следующем. Испытания проводят как в потоке, так и без потока в аэродинамической трубе, модель посредством тензовесов и державки устанавливают в подвижное поддерживающее устройство, модель колеблют с фиксированной частотой и малой амплитудой поочередно относительно осей Ox, Oy и Oz. Затем измеряют во времени действующие на модель нагрузки и ее угловое положение, производят вычитание инерционных и весовых нагрузок, в процессе испытаний модель вместе с державкой и тензовесами поворачивают на фиксированные углы крена, результаты эксперимента при колебаниях относительно осей Oy и Oz обрабатывают совместно. Устройство содержит поворотный круг в рабочей части аэродинамической трубы, стойку на поворотном круге, подвижную Г-образную раму, державку модели с тензовесами, смонтированную в подшипниковом узле рамы, привод, связанный тягами с рамой и державкой, датчики угла поворота рамы и державки. Державка выполнена с возможностью дистанционно управляемой установки под заданным углом крена при помощи механизма, состоящего из корпуса, установленного на подшипниковом узле рамы соосно державке посредством подшипников, электрического мотор-редуктора, выходного вала с упругим диском-шестерней, соединенного со свободным концом державки, пневмотормоза диска, дополнительного датчика угла установки державки по крену, который вынесен от оси державки и связан с диском-шестерней, снаружи корпус снабжен рычагом-зажимом для фиксации механизма относительно рамы и для соединения тягой с приводом. Технический результат заключается в расширении возможностей определения статических и нестационарных аэродинамических производных моделей летательных аппаратов в аэродинамической трубе при наличии угла скольжения во всем диапазоне углов атаки. 2 н.п. ф-лы, 7 ил. 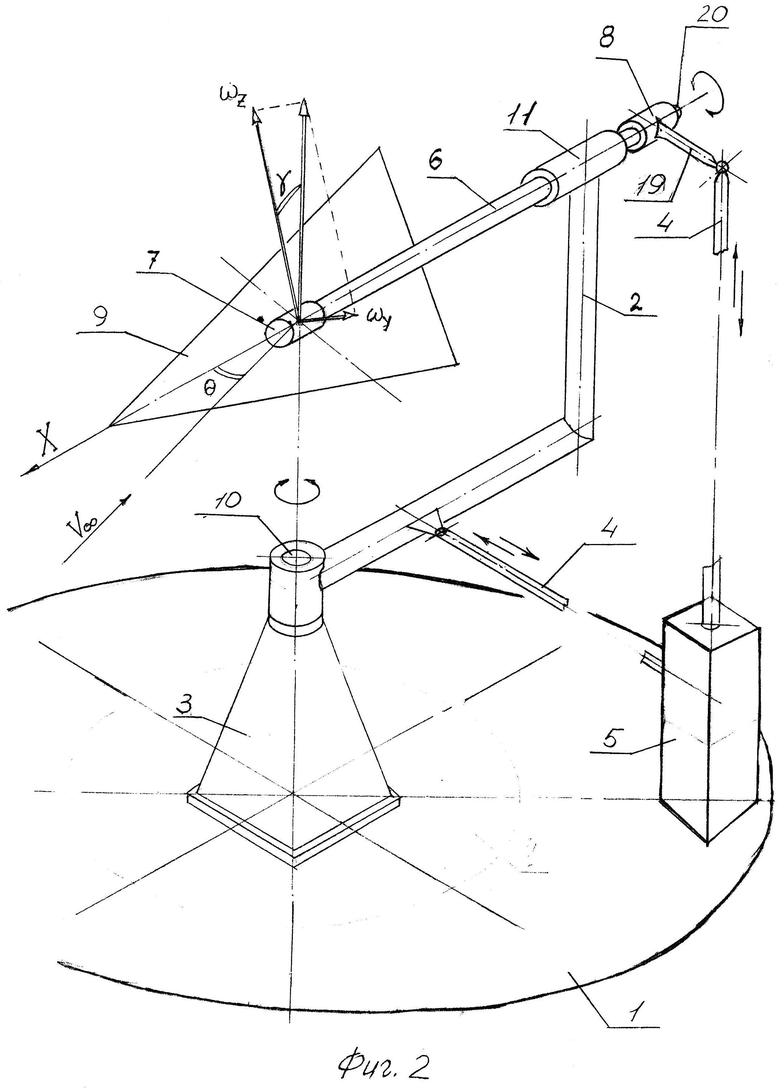
1. Способ определения статических и нестационарных аэродинамических производных моделей летательных аппаратов, заключающийся в том, что испытания проводят как в потоке, так и без потока в аэродинамической трубе, модель посредством тензовесов и державки устанавливают в подвижное поддерживающее устройство, модель колеблют с фиксированной частотой и малой амплитудой поочередно относительно осей Ox, Oy и Oz, измеряют во времени действующие на модель нагрузки и ее угловое положение, производят вычитание инерционных и весовых нагрузок, отличающийся тем, что в процессе испытаний модель вместе с державкой и тензовесами поворачивают на фиксированные углы крена, результаты эксперимента при колебаниях относительно осей Oy и Oz обрабатывают совместно, при этом значения статических и нестационарных аэродинамических производных определяют по формулам
,
 ,
,
 ,
,
,
где C=Cy, Cx, mx, my или mz, Cα - статическая производная аэродинамического коэффициента от угла атаки, Cβ - статическая производная аэродинамического коэффициента от угла скольжения, - комплекс продольных вращательной и нестационарной аэродинамических производных; - комплекс боковых вращательной и нестационарных аэродинамических производных, γ - угол поворота державки по крену, - составляющая сигнала в фазе с углом колебаний модели при колебаниях относительно оси Oz, - составляющая сигнала в фазе с углом колебаний модели при колебаниях относительно оси Oy, - составляющая сигнала в фазе с угловой скоростью колебаний модели при колебаниях относительно оси Oz, - составляющая сигнала в фазе с угловой скоростью колебаний модели при колебаниях относительно оси Oy, l - размах крыла модели, ba - средняя аэродинамическая хорда (САХ) модели.
2. Устройство для определения статических и нестационарных аэродинамических производных моделей летельных аппаратов, содержащее поворотный круг в рабочей части аэродинамической трубы, стойку на поворотном круге, подвижную Г-образную раму, державку модели с тензовесами, смонтированную в подшипниковом узле рамы, привод, связанный тягами с рамой и державкой, датчики угла поворота рамы и державки, отличающееся тем, что в него введен механизм дистанционной установки державки, состоящий из корпуса, установленного на подшипниковом узле рамы посредством подшипников, электрического мотор-редуктора и выходного вала с упругим диском-шестерней, установленных соосно державке и соединенных с ее свободным концом, пневмотормоза диска, установленного в корпусе и охватывающего упругий диск-шестерню, дополнительного датчика угла установки державки по крену, который вынесен от оси державки и связан с диском-шестерней, рычага-зажима, установленного на наружной поверхности корпуса механизма с возможностью фиксации корпуса относительно рамы и соединения тягой с приводом.
| Экспериментальные исследования и математическое моделирование нестационарных аэродинамических характеристик моделей самолетов | |||
| Труды ЦАГИ - сборник статей | |||
| М., 2010 г., выпуск 2689, стр.5-6 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ ПРИ УСТАНОВИВШЕМСЯ ВРАЩЕНИИ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2477460C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ И НЕСТАЦИОНАРНЫХ ПРОИЗВОДНЫХ КОЭФФИЦИЕНТОВ ПРОДОЛЬНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МЕТОДОМ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358254C1 |
| Г.С | |||
| Бюшгенс, Р.В | |||
| Студнев, Аэродинамика самолета | |||
| Динамика продольного и бокового движения | |||
| М., Машиностроение, 1979, стр.32-34 | |||

