фцг. if
Изобретение относится к измерительной технике и может быть использовано для измерений малых линейных и угловых перемещений.
Цель изобретения - упрощение уст- ройства - достигается путем использования одной и той же матрицы фотоприемников при измерении положения по двум координатам за счет того, что крестообразный источник излучения расположен под
утлом относительно оси симметрии матрицы фотоприемников.
На фиг. 1 показан принцип действия автоколлимационной оптической системы; на фиг. 2 - матрица фотоприемников и автоколлимационное изображение крестооб- разного источника излучения; на фиг. 3 - матрица фотоприемников, на которой штриховкой показаны фотоприемники, на выходе которых .присутствует сигнал; на фиг. 4 - блок-схема устройства; на фиг. 5 - временные диаграммы сигналов в разных точках блок-схемы устройства.
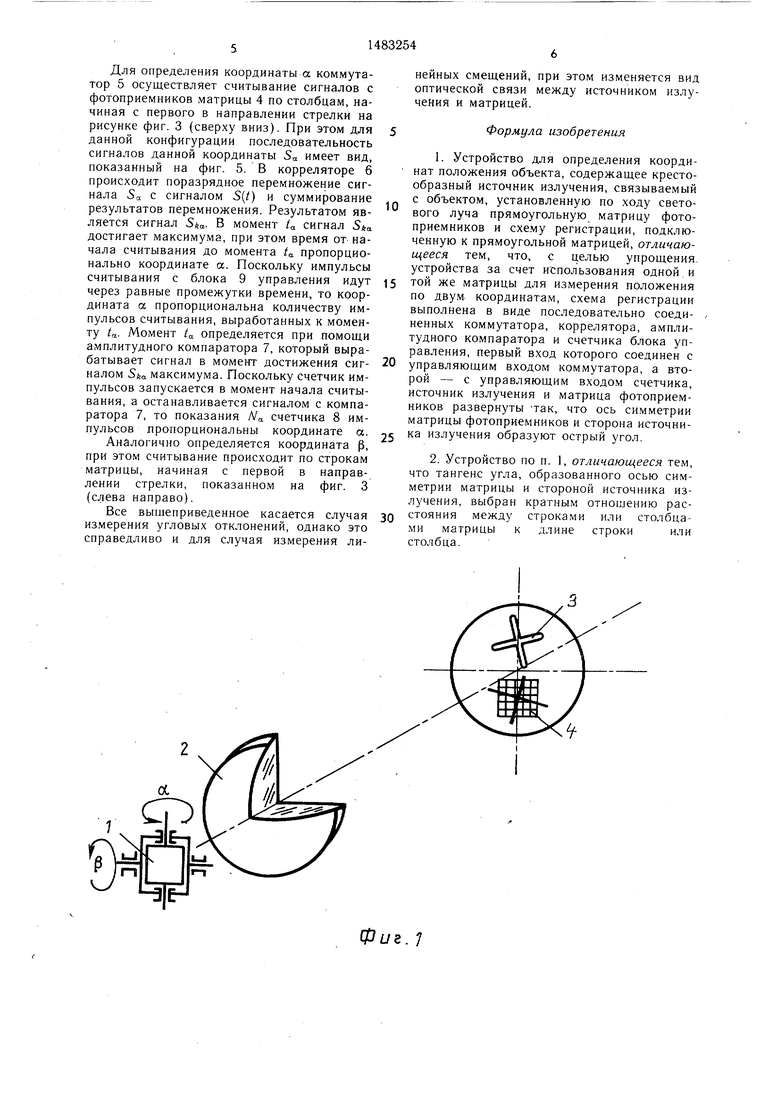
Устройство содержит зеркало 1, связываемое с объектом, автоколлимационную оптическую систему 2, крестообразный источник 3 излучения и прямоугольную мат- рицу 4 фотоприемников, размещенные в фокальной плоскости автоколлимационной оптической системы 2, коммутатор 5, коррелятор 6, амплитудный компаратор 7, счетчик 8 и блок 9 управления.
Рассмотрим работу устройства на приме- ре определения координат углового положения объекта. В этом случае оптическая связь матрицы и источника излучения осуществляется при помощи автоколлимационной оптической системы, принцип действия которой поясняется фиг. 1.
На фиг. 1 изображено зеркало 1, связываемое с объектом, угловое положение которого подлежит измерению. Возможность поворота по углам аир условно показана размещением зеркала 1 в осях подве- са. Зеркало 1 находится в поле зрения автоколлимационной оптической системы 2 (показана условно), в фокальной плоскости которой размещены крестообразный источник 3 излучения и матрица 4 фотоприемников.
Световой поток источника 3 проходит через автоколлимационную оптическую систему 2 и попадает на зеркало 1. Отраженный ог зеркала 1 световой поток вновь проходит через автоколлимационную опти- ческую систему 2 и попадает на матрицу 4 фотоприемников, на которой формируется автоколлимационное изображение крестообразного источника 3 излучения (условно показано крестом). При поворотах зеркала 1 на углы аир изображение источника 3 будет перемещаться по матрице 4 соответственно в горизонтальном и вертикальном направлениях.
;
0
5
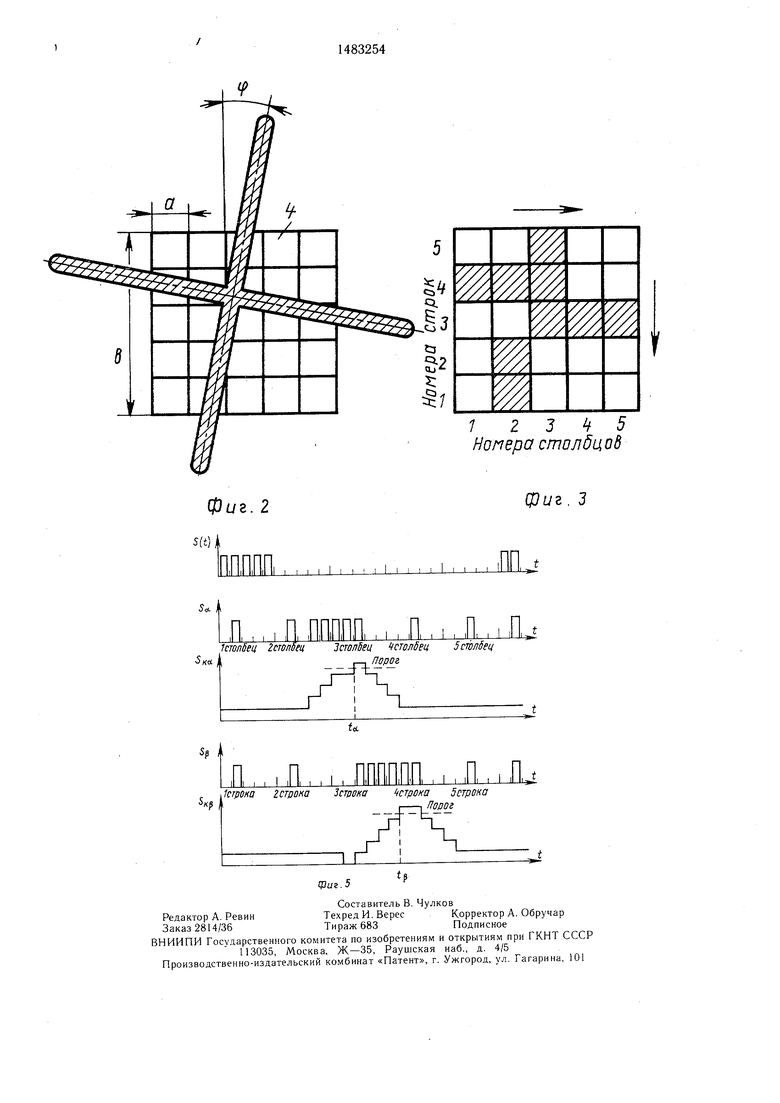
На фиг. 2 показан укрупненный вид матрицы 4 фотоприемников и автоколлимационное изображение крестообразного источника излучения.
Рассмотрим одну из линий креста, например вертикальную. Взаимодействие этой линии с прямоугольной матрицей при их взаимном развороте на угол ср эквивалентно взаимодействию линии без разворота с матрицей, выполненной в виде трансверсаль- ной сетки, т. е. при перемещении линии сигналы в фотоприемниках будут появляться последовательно в каждом ряду и по номеру ряда, в котором изменяется номер столбца, можно судить об угле поворота. При этом разрешающая способность будет определяться отношением размера а фотоприемника к количеству /V рядов.
При различных значениях угла ф получается различная разрешающая способность. Изменение разрешающей способности происходит дискретно при таких углах ф, при которых линия креста параллельна диагонали одного или нескольких столбцов матрицы.
Целесообразно выбирать тангенс угла разворота кратным отношению расстояния между строками или столбцами матрицы к длине строки или столбца, т. е.
,
где К -1,2,З...Л/(М);
а - расстояние между строками (столбцами) ;
b - длина строки (столбца); N(M) -количество строк (столбцов).
При /(1 достигается максимальная разрешающая способность, равная (в случае угловых измерений)
&a j-arctg-: -f
(2)
где / - фокусное расстояние объектива.
Аналогично можно определить угловое положение объекта по другой координате.
Коммутатор 5 осуществляет считывание сигналов с фотоприемников матрицы в два приема последовательно по строкам и по столбцам. Коррелятор 6 осуществляет сравнение последовательности сигналов строк или столбцов с эталонным сигналом S(t). Амплитудный компаратор 7 осуществляет сравнение сигнала с коррелятора 6 с пороговым уровнем (Упер . Счетчик 8 импульсов подсчитывает импульсы блока 9 управления от момента начала считывания сигналов с фотоприемников по строкам или столбцам до момента его остановки сигналом с амплитудного компаратора 7 и тем самым регистрирует (в относительных единицах) величину углового перемещения.
Работа схемы регистрации поясняется временными диаграммами, изображенными на фиг. 5.
Для определения координаты а коммутатор 5 осуществляет считывание сигналов с фотоприемников матрицы 4 по столбцам, начиная с первого в направлении стрелки на рисунке фиг. 3 (сверху вниз). При этом для данной конфигурации последовательность сигналов данной координаты 5а имеет вид, показанный на фиг. 5. В корреляторе б происходит поразрядное перемножение сигнала Sa с сигналом S(t) и суммирование результатов перемножения. Результатом является сигнал Ska- В момент ta сигнал достигает максимума, при этом время от начала считывания до момента ta пропорционально координате а. Поскольку импульсы считывания с блока 9 управления идут через равные промежутки времени, то координата а пропорциональна количеству импульсов считывания, выработанных к моменту /а. Момент (а определяется при помощи амплитудного компаратора 7, который вырабатывает сигнал в момент достижения сигналом Sfca максимума. Поскольку счетчик импульсов запускается в момент начала считывания, а останавливается сигналом с компаратора 7, то показания /Va счетчика 8 импульсов пропорциональны координате а.
Аналогично определяется координата р, при этом считывание происходит по строкам матрицы, начиная с первой в направлении стрелки, показанном на фиг. 3 (слева направо).
Все вышеприведенное касается случая измерения угловых отклонений, однако это справедливо и для случая измерения ли0
5
нейных смещений, при этом изменяется вид оптической связи между источником излучения и матрицей.
Формула изобретения
1.Устройство для определения координат положения объекта, содержащее крестообразный источник излучения, связываемый с объектом, установленную по ходу светового луча прямоугольную матрицу фотоприемников и схему регистрации, подключенную к прямоугольной матрицей, отличающееся тем, что, с целью упрощения устройства за счет использования одной и той же матрицы для измерения положения по двум координатам, схема регистрации выполнена в виде последовательно соединенных коммутатора, коррелятора, амплитудного компаратора и счетчика блока управления, первый вход которого соединен с управляющим входом коммутатора, а второй - с управляющим входом счетчика, источник излучения и матрица фотоприемников развернуты так, что ось симметрии матрицы фотоприемников и сторона источни5 ка излучения образуют острый угол.
2.Устройство по п. 1, отличающееся тем, что тангенс угла, образованного осью симметрии матрицы и стороной источника излучения, выбран кратным отношению расQ стояния между строками или столбцами матрицы к длине строкиили столбца.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2309381C1 |
| ЦИФРОВОЙ ДВУХКООРДИНАТНЫЙ ДИНАМИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2008 |
|
RU2437058C2 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| Способ измерения угловых перемещений объекта в двух взаимно перпендикулярных плоскостях и устройство для его осуществления | 1981 |
|
SU1049735A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2002 |
|
RU2244904C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
Изобретение относится к области измерительной техники и может быть использовано для измерений малых линейных и угловых перемещений. Цель изобретения - упрощение устройства - достигается за счет использования одной и той же матрицы фотоприемников при измерении положения по двум координатам за счет того, что крестообразный источник излучения расположен под углом относительно оси симметрии матрицы фотоприемников. Автоколлимационная оптическая система 2 формирует изображение крестообразного источника 3 излучения на матрице 4 фотоприемников, положение которого определяется углами поворота зеркала 1, связываемого с объектом. Коммутатор 5 осуществляет построчное считывание сигнала с матрицы 4. С помощью коррелятора 6 и амплитудного компаратора 7 осуществляется определение номера столбца, в котором изменяется величина сигнала, по номеру которого с помощью счетчика 8 осуществляется регистрация измеряемой величины в относительных координатах. Аналогично регистрируется положение объекта по другой координате, где считывание осуществляется по столбцам. 1 з.п. ф-лы, 5 ил.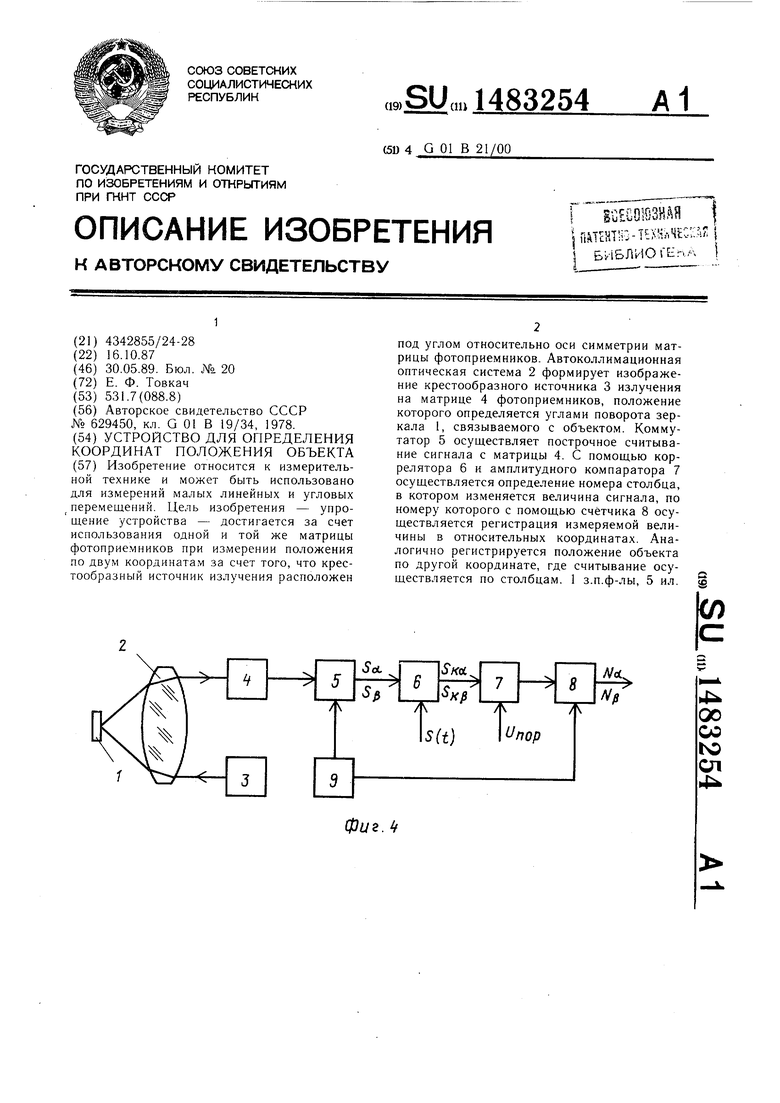
tt
Фиг. 1
Фиг. 2
I I IJI
lennsen
J
П . I, Л.,
Зсголбец /столбец 5стЬл6ец Порог,
S ь
фиг. 5
1 2 3 Ц 5
Но перо столбцоб
фиг. 3
J
П . I, Л., I Л, t
/столбец 5стЬл6ец рог,
Л, , i Л.
строка 5строка Подог
| Устройство определения координаты положения объектов | 1974 |
|
SU629450A1 |
