Изобретение относится к машиностроению и электротехнике и предназначено для изготовления отверстий различной формы в печатных платах.
Цель изобретения - повышение производительности и надежности работы.
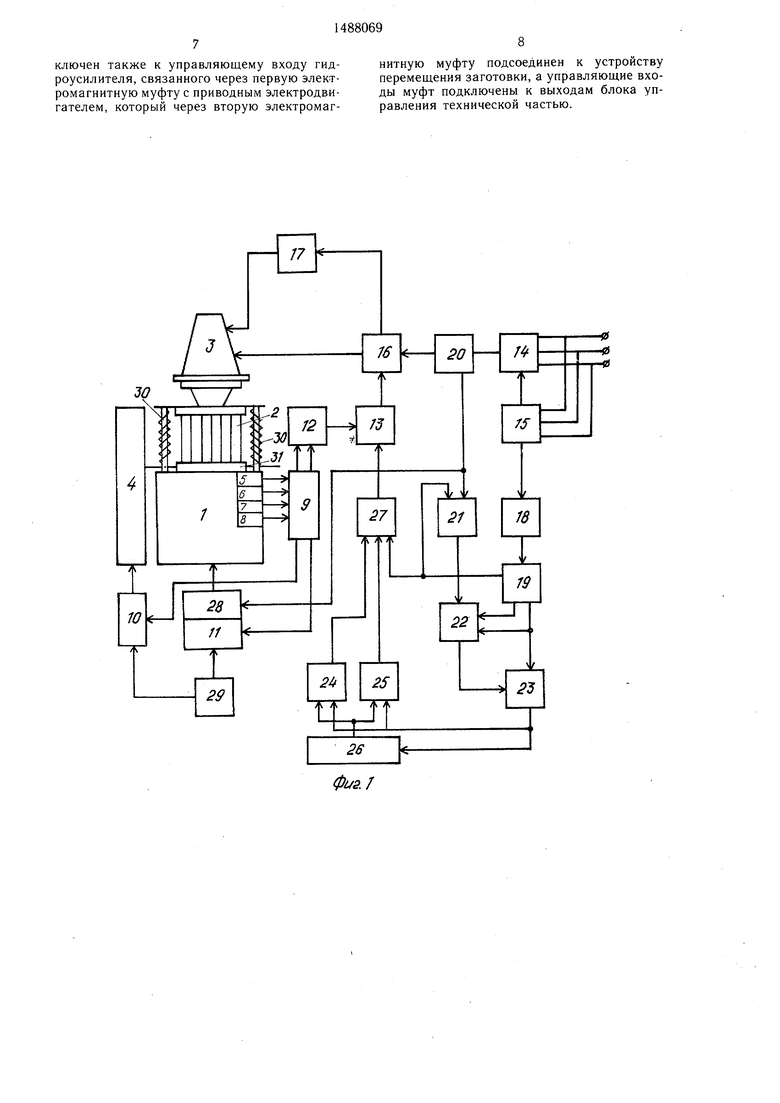
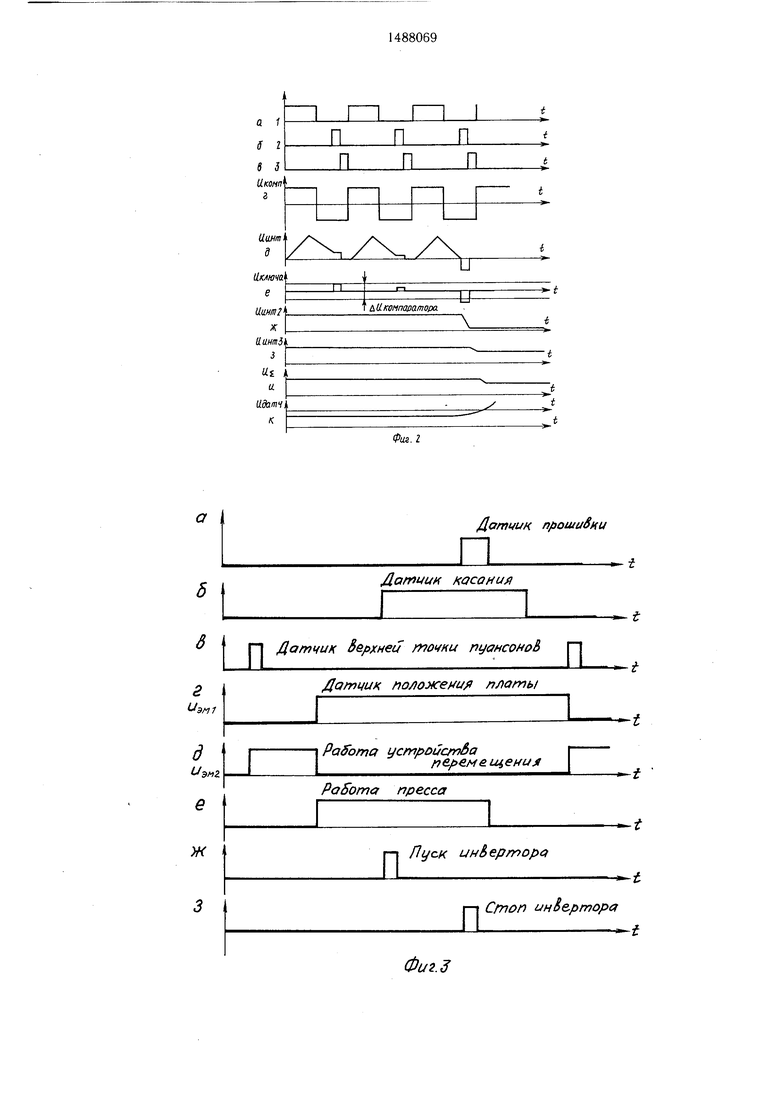
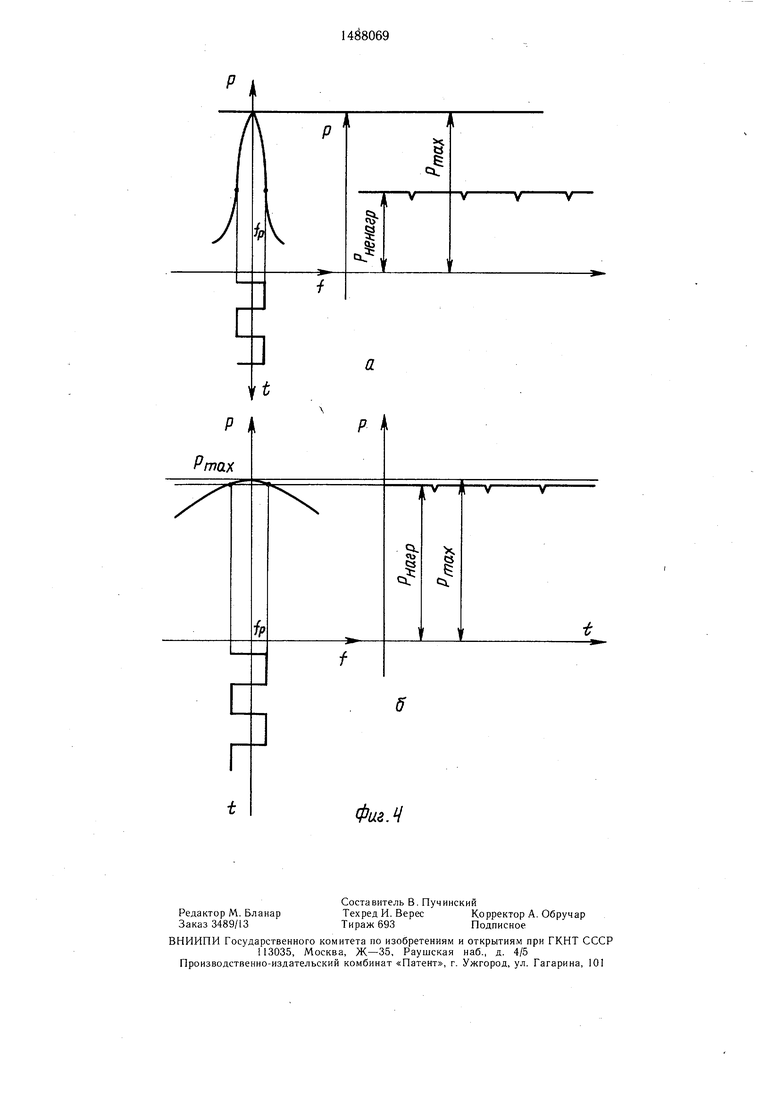
На фиг.- 1 изображена блок-схема автоматиеской линии ультразвуковой прошивки печатных плат; на фиг. 2 и 3 - временные диаграммы работы линии; на фиг. 4 - резонансные характеристики ненагруженного и нагруженного ультразвукового излучателя.
Линия содержит гидравлический пресс 1 с рабочим органом в виде матрицы и набора пуансонов 2, ультразвуковой излучатель 3, механизм 4 подачи и установки печатных плат, датчики 5-7 положения пуансонов, датчик 8 положения печатной платы, блок 9 управления механической частью, электромагнитные муфты 10 и 11, командное устройство 12, систему 13 управления автоматики инвертором тиристорного преобразователя частоты, силовой выпрямитель 14 с системой 15 управления, автономный инвертор 16, систему 17 авто- подмагничивання, счетчик 18, дешифратор 19, датчик 20, коммутатор 21, интегратор 22, аналоговый ключ 23, дополнительные интеграторы 24 и 25 с разными постоянными
4
00
сх
о
СП)
г
интегрирования, компаратор 26, сумматор 27, гидроусилитель 28, приводной электродвигатель 29, возвратные пружины 30, при этом пуансоны 2 связаны с ультразвуковым излучателем 3, с которым соединены выход системы 17 автоподмагничи- вания и один выход автономного инвертора 16. С гидравлическим прессом 1 соединен механизм 4 подачи и установки печатных плат, а также датчики 5-7 положения пуансонов и датчик 8 положения печатной платы.
Выходы этих датчиков подсоединены к входам блока 9 управления механической частью, выходы которого подсоединены к электромагнитным муфтам 10 и 11 и командному устройству 12, связанному с системой 13 управления автономным инвертором тиристорного преобразователя частоты, состоящего из силового выпрямителя 14, соединенного с системой 15 управления и автономного инвертора 16, соединенного с выходом системы 13 управления, выходом силового выпрямителя 14 и входом системы 17 автоподмагничивания. Выходы системы 15 управления соединены с силовым выпрямителем 14 и входом счетчика 18, выход датчика 20 соединен с одним входом коммутатора 21 и входом гидроусилителя 28, второй вход коммутатора 21 соединен с одним из входов сумматора 27 и одним из выходов дешифратора 19.
Выход коммутатора 21 соединен с одним входом интегратора 22, два других входа которого соединены с выходами дешифратора 19, один выход которого также соединен с одним из входов ключа 23, второй вход последнего связан с входом интегратора 22. Выход ключа 23 соединен с входом компаратора 26 и одними из входов дополнительных интеграторов 24 и 25, два упругих входа этих интеграторов соединены между собой и связаны с выходом компаратора 26. Выходы дополнительных интеграторов 24 и 25 соединены с двумя другими входами сумматора 27, выход которого соединен с входом системы 13 управления автономным инвертором. Выход гидроусилителя 28 соединен с гидравлическим прессом 1, а приводной электродвигатель 29 - с электромагнитными муфтами 10 и 11.
Предлагаемая линия работает следую- шим образом.
При подаче питания на автоматическую линию начинает работать приводной электродвигатель 29 и в исходное состояние устанавливаются системы управления и регулирован1 я. Синхросигналы с системы 15 управления выпрямителем поступают на вход счетчика 18, определяя формирование на выходах дешифратора 19 серий управляющих импульсов заданной
0
длительности и временной последовательной (фиг. 2а-в).
При пуске линии в работу блок 9 управления выдает командный сигнал на
включение электромагнитной муфты 11 , (фиг. Зв), начинает работать механизм 4 подачи и установки заготовок 31 печатных плат до того момента, пока не сработает датчик 8 положения печатной платы, выдающий сигнал о том, что заготовка 31 установлена {фиг. Зг). После этого блок 9 управления формирует сигнал на отключение электромагнитной муфты 10 и включение электромагнитной муфты 11, обеспечивая работу пресса 1. Пуансоны 2
со связанным с ними ультразвуковым излучателем 3 начинают опускаться. В момент соприкосновения пуансонов 2 с заготовкой 31 печатной платы срабатывает первый датчик 5 положения пуансонов и блок 9 управления формирует команду на запуск тиристорного преобразователя частоты (фиг. Зж). Срабатывает командное 12 устройство, запускается автономный инвертор 16, начинает работать система экстремального авторегулирования.
5 Информационный сигнал, пропорциональный выходной мощности тиристорного преобразователя частоты (фиг. 2к), поступает на управление гидроусилителем 28, определяя скорость движения пуансонов, и параллельно поступает на вход коммутатора 21,
0 управляемого от дешифратора 19 синхронно с качанием частоты работы тиристорного преобразователя частоты за счет одновременной подачи сигнала управления на вход сумматора 27 и на управление коммутатором 21 (фиг. 2г). На выходе
5 коммутатора 21 формируются равные по времени отрезки информационного сигнала, но противоположные по знаку (фиг. 2д), они поступают на вход интегратора 22, где происходит выделение разности инте0 гралов этих информационных отрезков, в зависимости от склона резонансной кривой нагрузочного контура (представленного в данном случае ультразвуковым излучателем). На выходе интегратора 22 формируется сигнал того или иного знака (фиг. 2д)
5 и в тот момент, когда интегратор 22 пере.водится сигналом с дешифратора 19 в режим запоминания, этим же сигналом замыкается ключ 23, обеспечивая выделение полезного сигнала, несущего информацию о режиме согласования тиристор0 ного преобразователя частоты с нагрузкой (фиг. 2е).
В зависимости от величины этого сигнала компаратор 26, управляющий дополнительными интеграторами 24 и 25 с разными постоянными интегрирования, либо разрешает интегрирование, либо удерживает интеграторы в режиме запоминания предыдущего уровня (фиг. 2ж, з). Наличие в системе, благодаря используемому компаратору 26 зоны нечувствительности определенной ширины повышает устойчивость работы системы на динамические нагрузки. Этой цели способствуют и интеграторы 24 и 25 с разными постоянными интегрирования, выходы которых связаны с разными входами сумматора 27, имеюши- ми различные коэффициенты передачи. Такое включение обеспечивает для интегратора 24 с малой постоянной и небольшим (в пределах 5-10%) диапазоном регулирования частоты высокое быстродействие в отработке возмущающих сигналов, а для интегратора 25 с большой постоянной и полным диапазоном регулирования частоты - повышенную устойчивость к резким колебаниям питающего напряжения и параметров ультразвукового излучателя.
Выходной сигнал сумматора 27 представляет совокупность медленно меняющейся составляющей и сигнала качания частоты тиристорного преобразователя (фиг. 2и). При слабо нагруженном ультразвуковом излучателе 3 (в момент касания пуансонов материала печатной платы) резонансная характеристика излучателя 3 очень остра, и система экстремального регулирования работает в двух точках на склонах резонансной кривой (фиг. 4а), обеспечивая минимум энергетических затрат тиристорного преобразователя частоты, меньшую загрузку излучателя 3, повышая тем самым надежность его работы. По мере увеличения усилия пресса резонансная характеристика нагружаемого излучателя 3 становится более пологой. При этом система экстремального регулирования обеспечивает режим выдачи в нагрузку максимальной акустической мощности от тиристорного преобразователя частоты (фиг. 46), удерживая максимальное значение информационного сигнала в течение прохождения пуансонов 2 через материал печатной платы. Этому режиму соответствует и .максимальная скорость движения пуансонов пресса, определяемая величиной сигнала управления гидроусилителем.
По окончании процесса прошивки срабатывает второй датчик 6 положения пуансонов (фиг. За), при этом блок 9 управления формирует команду на отключение электромагнитной муфты 10 связи с приводным электродвигателем 29 и дает команду на выключение тиристорного преобразователя частоты (фиг. Зз). Пуансоны 2 под действием возвратных пружин 30 возвращаются в исходное положение. Срабатывает датчик 5 исходного положения пуансонов (фиг. Зв), вновь включается электромагнитная муфта 11 связи приводного двигателя с механизмом 4 подачи и установки заготовок печатных плат, в пресс поступает новая заготовка 31, выталкивая уже гото0
5
0
5
0
5
0
5
0
5
вую печатную плату, вновь срабатывает датчик 8 положения печатной платы и процесс повторяется аналогично описанному.
Формула изобретения
Автоматическая поточная линия -ультразвуковой прощивки печатных плат, содержащая рабочий орган, устройство перемещения заготовки, блок управления механической частью, датчики положения платы и рабочего органа, источник питания, систему правления электрической частью с командным устройством, блок управления механической частью, причем блок управления механической частью связан с датчиками положения платы и рабочего органа и командным устройством системы управления электрической части, отличающаяся тем, что, с целью повышения производительности и надежности работы, линия содержит рабочий орган, выполненный в виде набора пуансонов и соответствующей матрицы, гидроусилитель, гидравлический пресс, ультразвуковой излучатель, две электромагнитные муфты, приводной электродвигатель, датчик информацион- ого сигнала, коммутатор, сумматор, счетчик, дешифратор, компаратор, аналоговый ключ, три управляемых интегратора, систему автоподмагничивания, силовой выпрямитель с системой управления, автономный инвертор с системой управления, причем силовой выпрямитель и его система управления входами подсоединены к источнику трехфазного напряжения, вход силового выпрямителя подключен к входу автономного инвертора, к другому входу которого подсоединена система управления, связанная входом с командным устройством, выход системы автоподмагничивания подсоединен к одному входу ультразвукового излучателя, а вход - к выходу автономного инвертора, второй выход которого подключен к другому входу ультразвукового излучателя, синхровыход системы управления выпрямителем подсоединен к входу счетчика, вход которого подключен к входу дешифратора, первый выход которого связан с первым входом сумматора и управляющим входом коммутатора, второй выход подсоединен к управляющему входу первого интегратора, а третий вход подключен к обнуляющему входу первого интегратора и управляющему входу аналогового ключа, в.ход которого через первый интегратор и коммутатор связан с датчиком информационного сигнала, а выход подсоединен к входам компаратора и второго и третьего интеграторов, управляющие входы которых подключены к выходу компаратора, а выходы - к второму и третьему входам сумматора, выход которого подсоединен к управляющему входу системы управления инвертором, выход датчика информационного сигнала подключей также к управляющему входу гидроусилителя, связанного через первую электромагнитную муфту с приводным электродвигателем, который через вторую электромагнитную муфту подсоединен к устройству перемещения заготовки, а управляющие входы муфт подключены к выходам блока управления технической частью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления тиристорным преобразователем частоты | 1986 |
|
SU1436238A1 |
| Устройство для управления тиристорным преобразователем частоты | 1986 |
|
SU1573513A1 |
| Способ управления тиристорным преобразователем частоты | 1985 |
|
SU1336176A1 |
| Способ управления преобразователем частоты и устройство для его осуществления | 1978 |
|
SU764090A1 |
| Устройство для управления автономным последовательным инвертором | 1980 |
|
SU921036A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Способ управления преобразователем частоты и устройство для его реализации | 1982 |
|
SU1069123A1 |
| Устройство для управления преобразователем частоты | 1988 |
|
SU1629953A1 |
| Способ регулирования частоты резонансного инвертора | 1988 |
|
SU1690133A1 |
| Устройство для управления преобразователем частоты | 1982 |
|
SU1070680A1 |
Изобретение относится к машиностроению и электротехнике и предназначено для изготовления отверстий различной формы в печатных платах. Цель изобретения - повышение производительности и надежности работы. Устройство содержит рабочий орган, устройство перемещения заготовки, блок управления механической частью, датчики положения платы и рабочего органа, источник питания и систему управления электрической частью с командным устройством. Рабочий орган выполнен в виде набора пуансонов и соответствующей матрицы, перемещаемых усилием гидравлического пресса с гидроусилителем. Линия снабжена дополнительным ультразвуковым излучателем, связанным с пуансонами, элементами системы управления, источником питания на базе тиристорного преобразователя и системой экстремального авторегулирования. Последняя обеспечивает режим выдачи в нагрузку максимальной акустической мощности от тиристорного преобразователя частоты. Максимальная скорость движения пуансонов пресса определяется величиной сигнала управления гидроусилителем. Это обеспечивает высокое качество прошивки хрупких слоистых материалов, не требующих чистовой обработки. Экономичная и эффективная работа линии обеспечивается за счет кратковременного выделения максимума ультразвуковой энергии в момент прохождения пуансонов через материал печатной платы. 4 ил.
0uaJ
Фи.З
Р
YУ
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
