Известны фотоэлектрические приборы для бесконтактного измерения заданных координат криволинейных поверхностей крупногабаритных деталей.
В предлагаемом приборе, с целью увеличения производительности труда, применены оптическая система, фотоэлектрическое устройство и механизм, фиксирующий результаты измерения на ленте.
С целью автоматизации настройки на измерение заданных координат, определяемых положением упоров, в приборе применено программное устройство, управляющее с помощью электромагнитов стопорами, взаимодействующими с упорами.
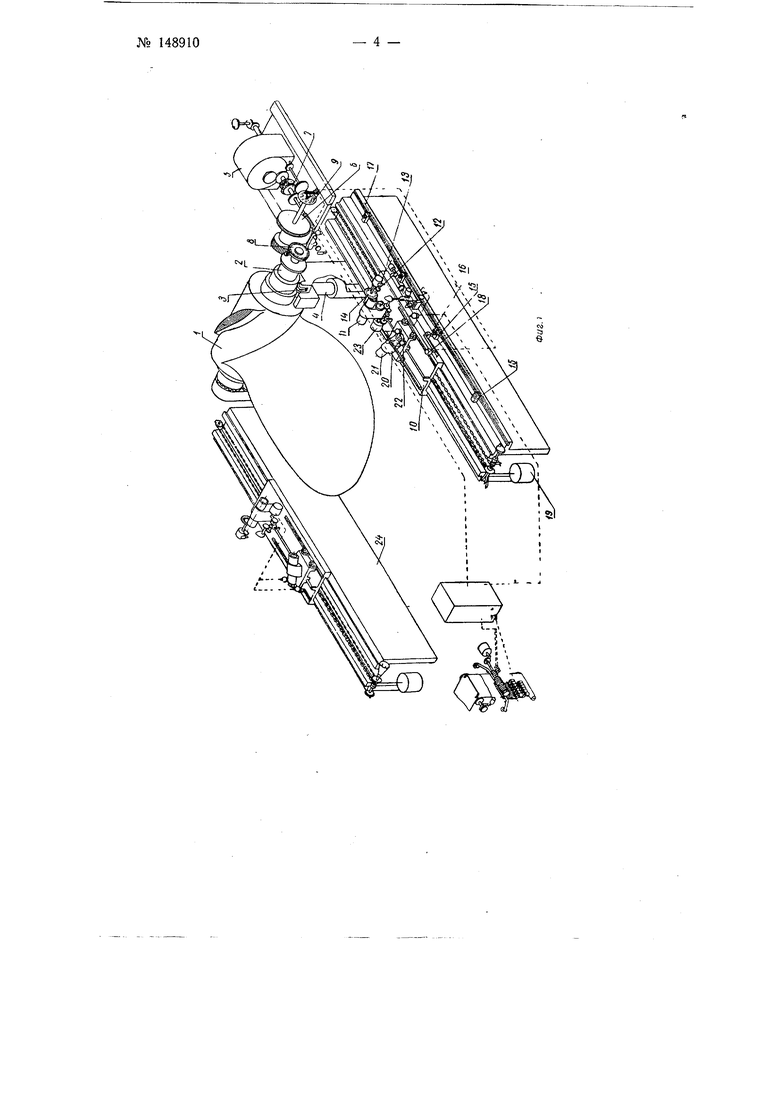
На фиг. 1 изображена схема предлагаемого прибора; на фиг. 2 - принципиальная схема измерения.
Изделие /, закрепленное на оправке 2, устанавливается на точные роликовые оправки 3. Для избежания повреждения точных роликовых опор при установке на них изделия предусмотрены дополнительные призматические опоры 4.
Изделие приводится в равномерное движение электродвигателем 5 через червячные передачи ff и дифференциал 7. На оправке закреплен точный лимб 8. Отсчет углов производится системой, передающей в заданные программным устройством 9 моменты времени величину угла в блок печати.
На основании перпендикулярно оси изделия помещается каретка 10 с измерительным устройством. На каретке укреплена проекционная система, предназначенная для проектирования световой марки на поверхность винта. Проекционная система состоит из объектива //, конден№ 148910 2 -.
сора 12, источника света 13 и модулятора 14. Установка марки на заданный радиус производится перемещением каретки W с проекционной системой. Каретка фиксируется в заданной точке специальными упорами 15 и стопором 16; упоры предварительно устанавливаются по шкале 17, исходя из расчетных величин радиусов. Одновременно с этим значение радиуса передается оператором в цифровое вычислительное устройство и блок печати.
После выключения стопора электромагнитом 18 каретка 10 под действием груза 19 переходит на новый радиус R.
Электромагнитом 18 в процессе измерения управляет программное устройство. Приемная система измерительного устройства перемещается по каретке 20, установленной на каретке 10. Отраженный от поверхности изделия световой поток через объектив и светоделительный блок зеркала подается на фотоэлементы 21. Отработка сигнала рассогласования производится электродвигателем 22, приводящим каретку 20 через зубчатую передачу 23. Одновременно сигнал поступает на кулачок кодирующего отсчетного устройства, которое построено на принципе счета числа штрихов, проходящих через щель. Световые импульсы, возникающие при прохождении отдельных щтрихов, регистрируются фотоэлементом и передаются, в заданные программным устройством 9 моменты времени, в арифметическое устройство и блок печати. По сигналам программного устройства в блок печати передаются угол поворота а, радиус сечения R и высотные координаты h.
На основании 24 помещается устройство, измеряющее координаты обратных сторон лопастей.
Измеренные координаты с обоих устройств поступают в арифметическое устройство, которым определяется толщина лопасти и .передается в блок печати.
Блок печати выдает результаты измерения в виде таблиц, напечатанных на бумажной ленте.
На изделие / проектируется световая марка при помощи оптической системы 25, которая помещается на каретке 10. Изображение световой марки проектируется на фотоэлемент принимаю.щей системой 27, перемещаемой iB поперечном направлении относительно проекционной системы 25. Перемещение принимающей системы измеряется по щкале Ж Принимающая система 27 состоит из объектива 29, светоделительного блока 30, модулятора 31, отражательных зеркал, фотоэлемента 26. Автоматическая регистрация направления линии визирования осуществляется на принципе .фотометрирования светового потока, разделенного на две части блоком 30. Отраженный от поверхности изделия световой поток поступает в объектив 29 и падает на светоделительный блок. Ребро блока делит поток на части 0i и Фа. При вращении диска модулятора 5/ на фотоэлемент попадают попеременно разделенные части светового потока. При визировании системы 27 на точку В центр изображения марки приводится точно на разделительное ребро светоделительного блока 30. При этом величины световых потоков 0i и Ф будут равны. При повороте изделия на расчетный угол световая марка перемещается в другую точку. При этом центр изображения марки сместится с разделительного ребра светоделительного блока и на фотоэлемент будут падать неравные по величине потоки 0i и Фа. Следующее исполнительное устройство, отрабатывая сигнал рассогласования, переместит принимающую систему 27 до приведения центра изображения марки на ребро светоделительного блока, что будет соответствовать условию ф Фа.
При этом расстояния Е- и Е от базы прибора, определяются по формулам:
Р - . р - 2 . р р А
, - ,L,- , t, t,-h..
где 5i и 2 - измеренные расстояния по шкале;
f - угол между принимающей и проекционной системами.
Предмет изобретения
1.Фотоэлектрический прибор для бесконтактного измерения заданных координат .юриволинейныХ поверхностей крупногабаритных деталей, отличающийся тем, что, с целью увеличения производительности, применены оптическая система, проектирующая световую марку на движущуюся поверхность изделия, фотоэлектрическое устройство, измеряющее расстояние до марки, и механизм, фиксирующий результаты измерения на ленте.
2.Прибор по п. 1, отличающийся тем, что, с целью автоматизации настройки на измерение заданных координат, определяемых положением упоров, применено программное устройство, управляющее с помощью электромагнитов стопорами, взаимодействующими с упорами.
№ 148910
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для наклейки линз | 1958 |
|
SU118601A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| Устройство для измерения перемещений объекта | 1971 |
|
SU441446A1 |
| Устройство для проекционного совмещения и мультипликации изображений | 1982 |
|
SU1088527A1 |
| Фотоэлектрический автоколлиматор | 1980 |
|
SU953458A1 |
| ТРЁХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ АВТОКОЛЛИМАТОР | 2017 |
|
RU2650432C1 |
| Телевизионный способ регистрации светового потока и формы изображения звезды при ее сцинтилляции | 1959 |
|
SU129263A1 |
| Устройство компенсации погрешностей обработки на металлорежущих станках | 1986 |
|
SU1706836A1 |
| Светопроекционный дальномер | 1984 |
|
SU1203356A1 |
| КО-ЭЛЕКТРОННОЕ АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО | 1969 |
|
SU243881A1 |