Изобретение относится к способам флотационного обогащения полезных ископаемых, конкретнее к способам и устройствам для автоматического управления процессом флотации в пневматических флотационных машинах колонного типа.
Цель изобретения - повышение точности управления за счет оперативного обеспечения необходимого объема камеры машины и дисперсного состава газовой фазы пульповоздушной смеси обогащаемого материала
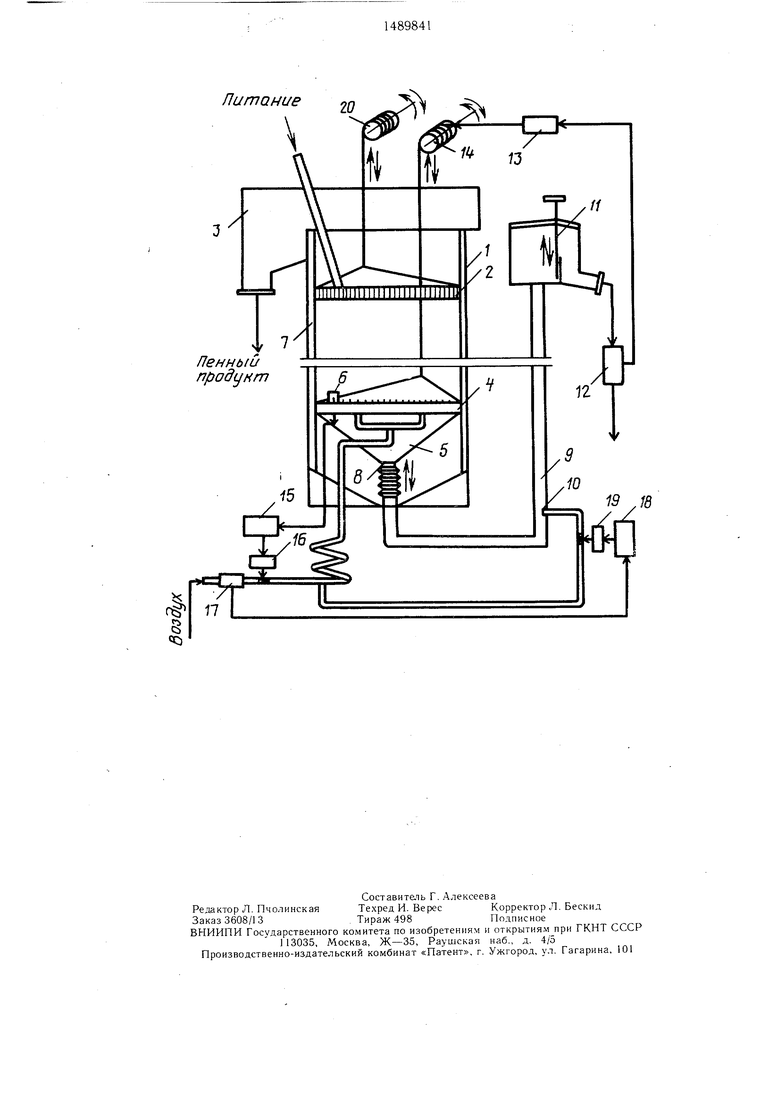
На чертеже представлено устройство, ре- ализуюшее данный способ.
Устройство содержит камеру 1 колонной машины, загрузочное приспособление 2, расположенное в верхней части камеры 1 машины под углом 3 разгрузки пенного продукта и выполненное с возможностью вертикального перемещения, диспергаторы 4, расположенные в нижней части камеры 1 машины.
выполненные с возможностью вертикального перемещения и жестко соединенные с приемником 5 хвостов флотации камерного продукта, на котором установлен датчик 6 гидростатического давления. Для вертикального перемещения загрузочные приспособления 2 и диспергаторы 4 с приемником 6 хвостов флотации установлены в направляющих 7, выполненных по высоте камеры 1 машины. Приемник 5 соединен эластичным гофрированным патрубком 8 с узлом 9 разгрузки хвостов флотации, в нижней части которого установлены диспергаторы 10, а в верхней части - регулируемая шиберная заслонка 11. На выходе узла 9 разгрузки хвостов флотации расположен анализатор 12 качества хвостов флотации камерного продукта, электрический выход которого соединен с входом регулятора 13 перемещения приемника 5 хвостов флотации. Регулятор 13 пеN
С
со
00
ремещения приемника 5 подключен к приводу 14 вертикального перемещения приемника 5. Электрический выход датчика 6 гидроста- тического давления связан с входом регулятора 15 давления воздуха, который управля- ет работой исполнительного механизма 16 подачи воздуха в диспергаторы 4. На трубопроводе подачи воздуха в диспергаторы 4 установлен расходомер 7 воздуха, выход KOTOpoYo электрически связан с входом ре- гулятора 18 подачи воздуха, подаваемого в диспергаторы 10. Регулятор 18 подачи воздуха управляет работой исполнительного механизма 19 подачи воздуха в диспергаторы -10, расположенные в узле 9 разгрузки хвостов флотации. Вертикальное перемещение загрузочного приспособления 2 в камере 1 мащины осуществляется с помощью привода вертикального перемещения загрузочного приспособления 2.
Сущность данного способа заключается в следующем.
В камере колонной пневматической мащины регулируют скорость флотации изменением объема камеры путем перемещения конусообразного приемника 5 хвостов фло- тации по камере мащины. При этом определяют изменение гидростатического давления пульповоздущной смеси обогащаемого материала в камере мащины и пропорционально ему изменяют давление воздуха, подаваемого на флотацию, измеряют содержание цен- ного компонента в хвостах флотации, по которому корректируют скорость флотации. Кроме того; измеряют расход воздуха, подаваемого на флотацию и пропорционально регулируют расход воздуха, подаваемого в узел разгрузки хвостов флотации.
Устройство работает следующим образом.
Исходная пульпа, предварительно обработанная реагентами, поступает в камеру 1 мащины через загрузочное приспособление 2. Легкофлотируемые частицы закрепляются на пузырьках воздуха, поднимающихся от диспергаторов 4, и разгружаются через узел 3 разгрузки пенного продукта. Труднофлотируемые частицы движутся по камере 1 ма- щины и по мере перемещения закрепляются на пузырьках воздуха, поднимающихся от диспергаторов 4. Пустая порода удаляется из камеры 1 мащины через узел 9 разгрузки хвостов флотации (камерного продукта).
При проведении процесса флотации в ко- лонной пневматической мащине хвосты флотации, разгружаемые через регулируемую шиберную заслонку 11, проходят через анали затор 12 качества хвостов флотации, кото
0
5 0
0 г
0
5
рый определяет содержание полезного компонента в хвостах флотации. Сигнал с выхода анализатора 12 подается на вход регулятора 13 перемещения приемника 5, который вырабатывает сигнал, поступающий на вход привода 14 вертикального перемещения приемника 5 хвостов флотации. При этсал происходит вертикальное перемещение приемника 5 камерного продукта по камере 1 мащины и установка его на той высоте камеры 1 мащины, при которой обеспечивается минимальное содержание полезного компонента в хвостах флотации. Датчик 6 гидростатического давления регистрирует изменение гидростатического давления, происщед- щее при изменении высоты установки приемника 5 и формирует сигнал, который подается на вход регулятора 15 давления воздуха подаваемого в диспергаторы 4. Регулятор 15 давления воздуха вырабатывает сигнал, поступающий на вход механизма 16 подачи воздуха в диспергаторы 4. Расходомер 17 определяет изменение подаваемого расхода воздуха и подает электрический сигнал на вход регулятора 18 расхода воздуха, который, управляя работой механизма 19 подачи воздуха в диспергаторы 10, регулирует расход воздуха, подаваемого в диспергаторы 4.
Формула изобретения
1.Способ управления процессом флотации в пневматической колонной мащине, включающий регулирование скорости флотации изменением объема камеры мащины, изменение расхода воздуха, подаваемого в камеру мащины и в узел разгрузки хвостов флотации, отличающийся тем, что, с целью повыщения точности управления за счет оперативного обеспечения необходимого объема камеры мащины и дисперсного состава газовой фазы пульповоздущной смеси обогащае.мого материала, измеряют содержание ценного компонента в хвостах флотации, гидростатическое давление пульповоздущной смеси обогащаемого материала в камере мащины и изменяют давление воздуха, подаваемого в процесс прямо пропорционально гидростатическому давлению пульповоздущной смеси обогащаемого материала в камере машины, при этом скорость флотации корректируют прямо пропорционально содержанию ценного продукта в хвостах флотации.
2.Способ по п. 1, отличающийся тем, что измеряют расход воздуха, подаваемого в процесс, и по нему корректируют изменение расхода воздуха, подаваемого в узел разгрузки хвостов флотации.
Питание
го
Пенный продунт

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом флотации в пневматической флотационной колонной машине с прямоточными и противоточными емкостями и устройство для его осуществления | 1986 |
|
SU1445798A1 |
| Способ управления процессом флотации в пневматической колонной машине с эластичным корпусом и устройство для его осуществления | 1988 |
|
SU1512662A1 |
| Способ управления процессом флотации в пневматической колонной машине | 1985 |
|
SU1314508A1 |
| Пневматическая флотационная машина | 1985 |
|
SU1248665A2 |
| Устройство для управления процессом флотации в пневматической колонной флотационной машине | 1990 |
|
SU1750734A2 |
| Пневматическая флотационная машина | 1984 |
|
SU1233946A2 |
| Способ управления процессом флотации в многоемкостных флотационных колонных пневматических машинах | 1987 |
|
SU1457254A1 |
| Способ управления процессом флотации в пневматических колонных флотационных машинах и устройство для его осуществления | 1984 |
|
SU1169752A1 |
| Устройство для управления колонной флотацией | 1990 |
|
SU1836985A1 |
| Пневматическая колонная флотационная машина | 1987 |
|
SU1456233A1 |
Изобретение относится к флотационному обогащению полезных ископаемых. Цель - повышение точности управления за счет оперативного обеспечения необходимого объема камеры колонной пневматической машины и дисперсного состава газовой фазы пульповоздушной смеси обогащенного материала. В камере машины регулируют скорость флотации изменением объема камеры путем перемещения конусообразного приемника хвостов флотации по камере машины. При этом определяют изменение гидростатического давления пульповоздушной смеси обогащаемого материала в камере машины и пропорционально ему изменяют давление воздуха, подаваемого на флотацию. В хвостах флотации измеряют содержание ценного компонента и по нему прямо пропорционально корректируют скорость флотации.Кроме того, измеряют расход воздуха, подаваемого на флотацию, и пропорционально регулируют расход воздуха, подаваемого в узел разгрузки хвостов флотации. 1 з.п. ф-лы, 1 ил.
| Пневматическая флотационная машина | 1985 |
|
SU1248665A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пневматическая флотационная машина | 1984 |
|
SU1233946A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
