Изобретение относится к ф.чотационному обогащению полезных исконаемых, а более конкретно к способам и устройствам для управления процессом флотации в пневматических флотационных машинах колонного типа.
Целью изобретения является повышение точности управления процессом флотации.
Способ управления процессом флотации в пневматической колонной машине заключается в следуюшем.
При проведении процесса флотации в эластичной камере машины контролируют содержание полезного компонента в хвостах колонной машины и обратно пропорционально регулируют высоту камеры машины, а следовательно, и время флотации минеральных частиц путем изменения угла поворота ее относительно вертикальной оси с целью уменьшения содержания полезного компонента в хвостах флотации. При это.м происходит изменение гидроаэродинамики про- цесса флотации по высоте камеры машины из-за изменения конфигурации машины и изменения ее высоты. Для обеспечения оптимальной гидроаэродинамики процесса по высоте камеры машины определяют изменение угла поворота камеры машины и регулируют расход воздуха, подаваемого в дис- пергаторы по высоте камеры машины, причем расход воздуха регулируют обратно пропорционально углу поворота камеры машины.
На чертеже представлено устройство, реализуюшее способ.
Устройство включает камеру 1 колонной машины, выполненную из эластичного материала, кольцевое загрузочное устройство 2, выполненное с возможностью вращения вокруг вертикальной оси камеры 1 машины и расположенное в верхней части камеры под устройством 3 разгрузки пенного продукта, и диспергаторы 4, установленные в нижней части камеры 1 машины над узлом 5 разгрузки камерного продукта. Нижняя часть камеры I машины установлена в винтовых направляющих 6 с возможностью вращатель- но-поступательного перемешения. По высоте камеры 1 машины расположены диспергаторы 7. На выходе узла 5 разгрузки камерного продукта установлен анализатор 8 качества камерного продукта, электрический выход которого соединен с входом регулятора 9 угла поворота камеры 1 машины.
Регулятор 9 угла поворота управляет работой узла 10 для изменения угла поворота камеры 1 машины вокруг своей оси, с которым электрически связан датчик 11 угла поворота камеры. Электрический выход датчика 11 угла поворота камеры 1 машины связан с выходами регуляторов 12 расхода воздуха, установленных на каждом диспергаторе 7, расположенных по BhicoTe камеры 1 машины. Каждый регулятор 12 расхода воздуха управляет работой исполнительного механизма 13 подачи
:
15
25
5
10
20
55
30
35
40
45
50
воздуха в диспергатор 7, который с помощью управляемого вентиля 14 регулирует расход воздуха, подаваемого в каждый диспергатор 7.
Устройство работает следующим образом.
Исходная пульпа, предварительно обработанная реагентами, поступает в камеру 1 машины через загрузочное устройство 2. Легкофлотируемые частицы закрепляются на пузырьках воздуха, поднимающихся от дис- пергаторов 7, расположенных в верхней части камеры I машины и разгружаются из камеры 1 машины через устройство 3 разгрузки пенного продукта. Труднофлотируемые частицы движутся по камере I машины и по мере перемещения закрепляются на пузырьках воздуха, поднимающихся от диспергаторов 7 и 4. Пустая порода удаляется из камеры 1 машины через узел 5 разгрузки камерного продукта.
При проведении процесса флотации камерный продукт, разгружаемый через узел 5 разгрузки камерного продукта, проходит через анализатор 8 качества камерного продукта, который определяет содержание ценно, го компонента в хвостах флотации. Сигнал с выхода анализатора 8 качества камерного продукта подается на вход регулятора 9 угла поворота камеры 1 машины, который вырабатывает сигнал, поступающий на вход узла 10 изменения угла поворота камеры 1 машины вокруг своей оси. При этом происходит изменение высоты камеры 1 машины, что приводит к изменению гидроаэродинамики процесса по высоте камеры 1 машины, причем для предотвращения упругой деформации камеры 1 мащины, возникающей при вращении ее вокруг вертикальной оси, узлу 5 разгрузки камерного продукта обеспечивают возможность свободного вертикального перемещения по винтовым направляющим 6. Датчик 11 угла поворота камеры 1 мащины регистрирует это изменение угла поворота и формирует сигнал, который подается на входы регуляторов 12 расхода воздуха, установленных на каждом диспергаторе 7. Каждый регулятор 12 расхода воздуха вырабатывает сигнал, поступающий на вход соответствующего исполнительного механизма 13 подачи воздуха в диспергаторы 7, который с помощью вентиля 14 регулирует расход воздуха, подаваемого в соответствующий диспергатор 7.
Формула изобретения
Способ управления процессом флотации в пневматической колонной мащине с эластичным корпусом, включающим изменение высоты камеры машины и регулирование расхода воздуха, подаваемого в диспергаторы, расположенные по ее высоте, отличающийся тем, что, с целью повышения точности управления процессом флотации, контролируют содержание ценного компонента
1512662
56
в камерном продукте и регулируют уголдиспергаторов, отличающееся тем, что, с це- поворота камеры машины вокруг ее оси,лью повышения точности управления про- после чего определяют изменение угла пово-цессом флотации, оно снабжено анализа- рота камеры машины и регулируют дав-торами качества камерного продукта, регуля- ление воздуха, подаваемого в диспергаторытором угла поворота камеры машины, дат- по высоте камеры машины, при этом уголчиком угла поворота и последовательно сое- поворота камеры машины регулируют обрат-диненными регулятором расхода воздуха но пропорционально содержанию ценногои исполнительными механизмами по числу компонента в камерном продукте, а давле-диспергаторов, при этом выход анал41зато- ние воздуха, подаваемого в диспергаторы пора качества камерного продукта через регу- высоте камеры машины, регулируют обрат- 10 лятор угла поворота камеры машины под- но пропорционально углу поворота камерыключен к узлу для изменения угла пово- машины.рота камеры машины, соединенной с дат- 2. Устройство для управления процессомчиком угла поворота, выход которого под- флотации в пневматической колонной машинеключен к каждому регулятору расхода воз- с эластичным корпусом, содержашее узел духа, а каждый исполнительный механизм для изменения угла поворота камеры ма-соединен с соответствуюш.им управляемым шины и управляемые вентили по числувентилем.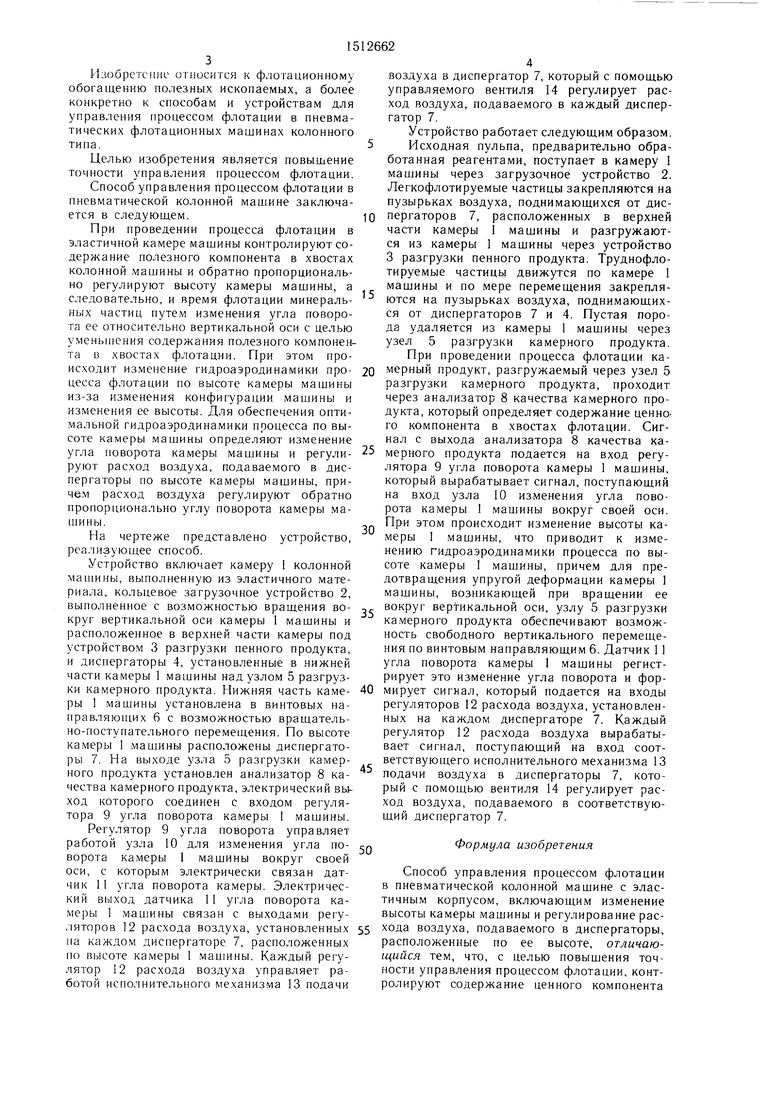
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом флотации в пневматической колонной машине | 1987 |
|
SU1489841A1 |
| Пневматическая колонная флотационная машина | 1987 |
|
SU1456233A1 |
| Способ управления процессом флотации в пневматической колонной машине | 1985 |
|
SU1314508A1 |
| Способ управления процессом колонной флотации и устройство для его осуществления | 1990 |
|
SU1789282A1 |
| Устройство для управления колонной флотацией | 1990 |
|
SU1836985A1 |
| Способ управления процессом флотации в пневматической флотационной колонной машине с прямоточными и противоточными емкостями и устройство для его осуществления | 1986 |
|
SU1445798A1 |
| Устройство для управления процессом колонной флотации | 1990 |
|
SU1832058A2 |
| Устройство для управления процессом флотации в пневматической колонной флотационной машине | 1990 |
|
SU1750734A2 |
| Способ управления процессом пенной сепарации | 1989 |
|
SU1722598A2 |
| Машина пенной сепарации | 1990 |
|
SU1715433A2 |
Изобретение относится к флотационному обогащению полезных ископаемых и повышает точность управления процессом флотации. Для этого в процессе флотации в эластичной камере (ЭК) 1 машины контролируют содержание полезного компонента (ПК) установленным на выходе узла 5 разгрузки анализатором 8 качества камерного продукта в хвостах колонной машины и обратно пропорционально регулируют высоту ЭК 1 машины, а следовательно, и время флотации минеральных частиц путем изменения угла поворота ее относительно вертикальной оси для уменьшения содержания ПК в хвостах флотации. Изменение угла поворота ЭК 1 осуществляется узлом 10, работой которого управляет связанный с выходом анализатора 8 регулятор 9 угла поворота. Для обеспечения оптимальной гидроаэродинамики процесса по высоте ЭК 1 машины определяют датчиком 11 угла поворота изменение угла поворота ЭК 1 и связанным с датчиком 11 регулятором 12 регулируют расход воздуха, подаваемого в диспергаторы (Д) 7 по высоте ЭК 1. Каждый регулятор 12 управляет работой исполнительного механизма 13 подачи воздуха, который с помощью вентиля 14 регулирует расход воздуха в соответствующий Д 7. При этом угол поворота ЭК 1 регулируют обратно пропорционально содержанию ПК в камерном продукте, а давление воздуха, подаваемого в Д 7, обратно пропорционально углу поворота ЭК 1 машины. 2 с.п.ф-лы, 1 ил.
| Пневматическая флотационная машина | 1984 |
|
SU1233946A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Пневматическая флотационная колонная машина | 1985 |
|
SU1297921A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
