113
Изобретение относится к области флотпционпого обогащения полезных ископаем1лх, я более конкретно к способу длл автоматического управления процессом флотации в пневматических флотационных маигинах колонного типа. Целью изобретения является повышение точности управления за счет создания оптимальных аэрационных условий процесса по высоте колонной машины
На чертеже показано устройство, реализующее предлагаемый способ.
Предлагаемый способ осуществляется следуюп1им образом,
В процессе флотации минеральных ча стиц, предварительно обработанных реагентом-собирателем, в каждой емкости камеры машины происходит прямоточный или противоточный процесс флотации ценного компонента. Содержание ценного компонента в хвостах определяют в каждой .емкости в резуль- тате отбора проб камерного продукта на выходе Каждой eмlcoctи. Для сниже- Н1ГЯ потерь увеличивают время флотации нйрала в соответствующих емкостях, при этом время флотации регули- pyipT за счет изменения скоростных потоков в прямоточных и противоточ- иых емкостях. При этом дополнительно в каждой емкости камеры машины создают оптимальный дисперсный состав воздушной фазы пульповоздутной смеси по высоте емкости-за счет подачи воздуха в емкость на разные, не менее двух, уровней по высоте камеры машины.
Для создания оптимального дисперсного состава воздушной фазы по высоте емкости камеры машины измеряют расход воздуха, подаваемого на каждый уровень по высоте емкости, и регулируют дополнительный расход воздуха, подаваемый на следующий по высоте уровень.
Расход воздуха, подаваемый в пря- моточнук емкость, регулируют обратно пропорционально высоте подачи розду- ха в емкость камеры машины, а расход воздуха, подаваемого в 11ротнвоточну| емкость,- регулируют прямо пропорционально высоте подачи воздуха в емкость камеры машины по ее высоте. Затем вновь определяют содержание ценного компонеита в хвостах и повторяют процесс до тех пор, пока содержание ценного компонента в хвостах не минимальным.
А5П82
Таким образ.ом, п каждой 1 мкос:ти камеры машины обеспечиплют оптимальный дисперсньд состав ппздушиой фазы пульповоздушной смеси по высоте ем- кости, что и обеспечивает наилучшие показатели флотации (извлечение ценного компонента в кo и eнтpaт) .
Устройство включает 1 с набором концентрически расположенных O 1;илиндрических емкостей 2 и 3, образующих между собой в нижней части камеры машины кольцевое отверстие А.
8камере 1 установлены диспергаторы 5, а в нижней части емкостей 2 и 3
5 расположены диспергаторы 6 и 7 воздуха соответственно. В верхней части камеры 1,установлены загрузочное устройство 8 и разгрузочное устройство
9с патрубками 10 для удаления пеп- 0 кого продукта. В каждой емкости 2 и
3 имеются по две 11, 12 и 13, 14 соответственно, причем каждая из обечаек о,бразует с внутренней по- верхностью емкостей 2 и 3 полости
5 для подачи воздуха. В каждой .обечайке П, 12, 13 и 14 установлены диспергаторы .15, 16, 17 и 18 соответственно для подачи воздуха в каждую из обечаек. Внутри цилиндрических
0 емкостей 1. иЗ расположеньГ: датчики 19 скорости пульповоздуганых потоков, выходы которых соединены с ;.ходами регуляторов 20, а выходы регуляторов 20 - с входами- исполнительных уст---
5 ройств 7.1, сочлененных вентилями 22. По(1педние установлены перед соответствующими диспергаторами 6 и 7 на воздушных трубопроводах подачи воздуха, В нижней части камеры 1 машины
0 расположены патрубки 2.3 щя разгрузки отходов (хвостов) из емкостей 2 и 3. Диспергаторы 6 и 7 через расхо- дометры 24, регуляторы 25, ксполни- Тельные -устройства 26 и вентили 27
45 соединены с диспергаторами 15 и 17 соответстзенно, а диспергатсры 15 и 17 связаны через аналогичные устройства с диспергаторс1ми 16 и )8, Перед камерой 1 устройства установлен гид50 роциклон 28«
Устройство работае г следующим образом.
Исходна; пульпаj обработанная реа- .гентом, подается в гидроциклон 28,
55 откуда крупный (пески гидро- V 1днклона) через загрузочное устройство 8 проступает на шотацию в камеру 1. Здесь происходит флотация легкофлотируемых мг-1нералов, которые разгрук чютгя чрррз рлчгручочиоо устрой- стпп 9 и выводятс ,1:3 длльиейшего процессл г потяции черея патрубки 10.
Тоикодиспсрсная фракция пульпы (слив гидроциклона) подается i-ra вход цилиндрической емкости 2. Одновременно в эту же емкость поступает камерный продукт из камеры I. В емкости 2 протекает процесс противоточной флотации, при этом пенный продукт разгружается через разгрузочное устройство 9 и удаляется по патрубкам 10, Непрофлотировавтийся материал через нижнее кольцевое отверстие поступает на прямоточную флотацию в ем- кость 3, а пустая порода проваливается через дисперглторы 6 и удаляется из камеры машины по патрубку 23. Пенный продукт из емкости 3 объединяется с пеиным продуктом из емкости 2 и разгружается через разгрузочное устройство 9. Пустая порода (отходы) проваливаются че рез диспергаторы 7 3 и удаляется из процесса по п атрубку 23.
При проведении процесса флотации контролируют наличие труднофпотируе- мых минералов в хвостах (отходах), полученных на прямоточной и противоточной стадиях флотации в емкостях 2 и 3, и изменяют (регулируют) давление воздуха, подаваемого в диспергаторы 6 и 7, изменяя скоростные потоки в емкостях 2 и 3.
Изменение скоростных потоков в емкостях 2 и 3 камеры 1 фиксируется датчиками 9 скорости пульповоздуш- ной смеси, например, термоанемометри- ческого типа, установлелпыми в каждой емкости. Сигналы с датчиков 19 через регуляторы 20 воздействуют на исполнительные устройства 21, приво
дярдае в действие вентили 22, установленные на трубопроводах, обеспечивающих подачу воздуха в диспергаторы 6 и 7, При зтом в каждой емкости 2 и 3 камеры мапшны изменяются дисперсный состав воздушной фазы пульповоздушной смеси по высоте емкости, что приводит в конечном счете к повышению точности управления процессом флотации.
Изменения давления воздуха в дис- пергаторах 6 и 7, в емкостях 2 и 3 фиксируется расходомерами 24, установленными на каждом трубопроводе для. подачи боздуха в диспергаторы 6 и 7. Сигналы о изменении расхода воздуха с расходомеров 24 через регуляfpJ5
3 4508д
торы 25 подаются ткч входы McneviHH- тельных устройств 26, которые приводят в дейстрие вентили 27, установленные на трубопроводах, обеспочиваю- П1их дополнительную подачу воздуха в диспергаторы 15 и 17 обечаек П и 14, установленных соответственно в емкостях 2 и 3.
При регулировании расхода воздуха в диспергаторах 15 и 17 изменяется расход воздуха в диспергаторах 16 и 18 через систему управления, состоящую из расходомеров 24, регуляторов 25, исполнительных устройств 26 и вентилей 27. При зтом дополнительный расход воздуха, подаваемый в обечйй- ке прямоточной емкости 3, регулируется обратно пропор ционально высоте подачи воздуха в емкость камеры машины, а расход воздуха, подаваемый в обечайки противоточной емкости 2, регулируется прямо пропорционально высоте подачи воздуха в емкость камерб 1 по ее высоте. В результате процесса регулирования в каждой емкости камеры 1 машины устанавливается соот- ветствуюсций дисперсный состав воздушной фазы пульповоздушной смеси по высоте емкости. За счет этого обеспечивается оптимальный дисперсный состав воздушной фазы по высоте камеры 1 машины как в прямоточной, так и в противоточной емкостях в соответствии с аэрогидродинамическим режимом потоков пульповоздушной смеси в этих емкостях.
Установление оптимального дисперсного состава воздушной фазы по высоте емкостей 2 и 3 камеры I способствует более точному управлению процессом флотации в пневматической флотационной колонной матине, что приводит к повышению извлечения ценного компонента в концентрат.
20
25
30
35
40
Формула изобретения
Способ управления процессом флотации в пневматической колонной машине, основанный на измерении скорости прямоточных и противоточиых потоков пульпово здушной смеси и изменении расхода воздуха, подаваемого в прямоточные и противоточные потоки пуль- повоздушной смеси,пропорционально измеренным скоростям потоков, отличающийся тем, что, с целью повышения точности управления за . счет создания оптимальных аэрационпых условий процесса тто. ямсоте колонной матииы, воздух дополнителько подают на разные, HG менее, двух, урон- ни по пысоте прямоточных и противо- ТОЧ1ШХ потоков пульповоэдутной смеси колонной машины, измеряют расход воз духа, подаваемого на каждый уровень по высоте ripHMO i O iHyx и протиноточ- ных потоков пульпо йо здушной смеси, и расход воздуха, додаваемого на верхний уровень, изменяют пропорционально расходу воздуха, подаваемого
Слиб г- Питание,
т
п
на ияжиш уронен,, а расход .ч, ггоданлемого в прямоточный поток пуль- пс)П(( смеси, корректп)у1от па Г е;п5чппу, обратно пропорциональную измененному расходу воздуха на уровне по высоте потока пульпопоздушиой смеси, а расход воздуха, подаваемого р-противоточный поток пульповоздуи - ной смеси, корректирует на величину, прямо пропорциональную 1тзмерсн юму расходу воздуха на уровне по высоте потока пульповоздуюной снесп.
5
„„ Воздух.
П

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом флотации в многоемкостных флотационных колонных пневматических машинах | 1987 |
|
SU1457254A1 |
| Способ управления процессом флотации в пневматической флотационной колонной машине с прямоточными и противоточными емкостями и устройство для его осуществления | 1986 |
|
SU1445798A1 |
| Способ управления процессом флотации в пневматической колонной машине | 1987 |
|
SU1489841A1 |
| Способ регулирования процесса флотации в пневматической колонной машине и устройство для его осуществления | 1984 |
|
SU1214213A1 |
| Способ управления процессом флотации в пневматических колонных флотационных машинах и устройство для его осуществления | 1984 |
|
SU1169752A1 |
| Устройство управления процессом флотации в колонной пневматической машине | 1985 |
|
SU1314509A1 |
| Устройство для управления процессом флотации в пневматической колонной флотационной машине | 1990 |
|
SU1750734A2 |
| Аэролифтно-пневматическая флотационная машина | 1980 |
|
SU971484A1 |
| Способ управления процессом флотации в пневматической колонной машине с эластичным корпусом и устройство для его осуществления | 1988 |
|
SU1512662A1 |
| Колонная флотационная машина | 1985 |
|
SU1304896A1 |

Изобретение относится к области флотационного обогащения полезных ископаемых и повышает точность управления процессом флотации за счет создания оптимальных аэрацион тых условий процесса по высоте колонной машины, путем отбора проб определяют содержание ценного компонента в каждой камере. В каждой емкости камеры измеряют скорость прямоточных и противоточных потоков пульповоздушной смеси (ПВС). Пропорционально ей изменяют расход подаваемого в прямоточные и противоточные потоки ПВС воздуха, В каждую емкость камеры машины воздух дополнительно подают на разные, не менее двух, уровни по высоте прямоточных и противоточных потоков ПВС. Измеряют расход воздуха, подаваемый на каждый уровень, и регулируют дополнительный расход воздуха, подаваемый на следующий по высоте уровень. Расход воздуха, подаваемого на верхний уровень, изменяют пропорционально расходу воздуха, подаваемому на нижний уровень. Расход воздуха, подаваемого в прямоточный поток, корректируют на величину, прямо пропорциональную измеренному расходу воздуха на уровне по высоте потока ПВС. Расход воздуха в противоточный поток ПВС регулируют прямо пропорционально измеренному расходу воздуха на уровне по высоте потока ПВС. Процесс повторяют до максимального выделения ценного флотируемого компонента. I ил. i (Л со 1 СП о 00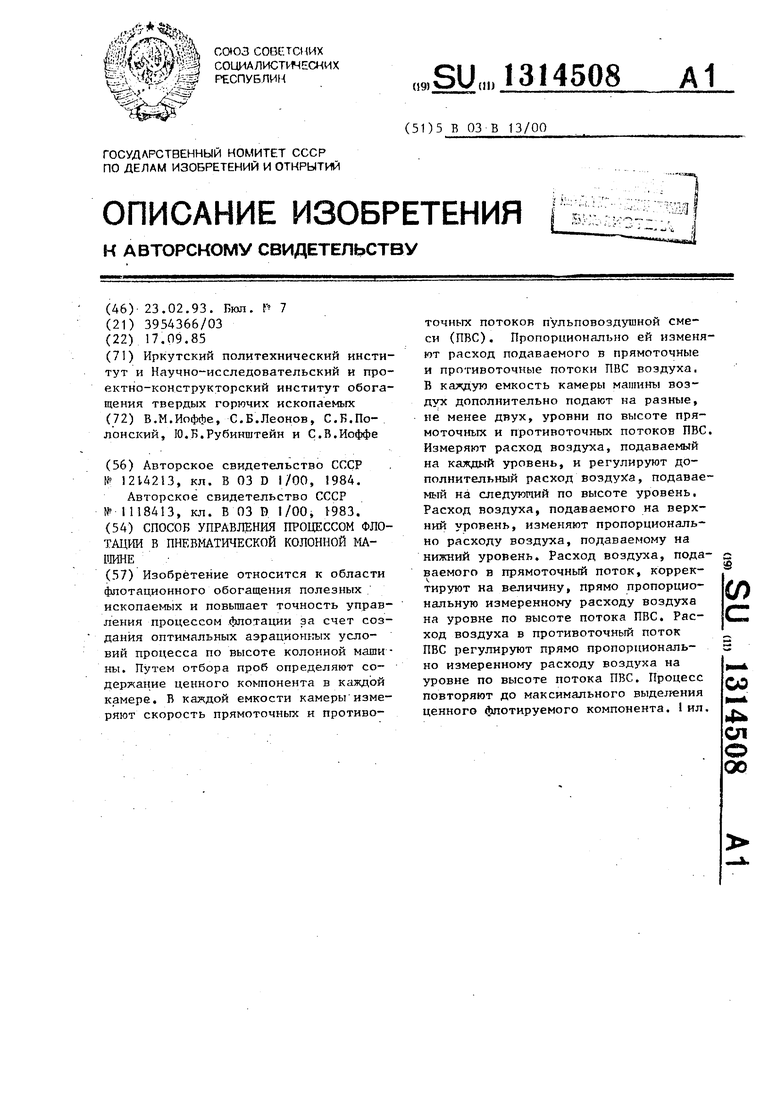
Составитель В„ Персиц Редактор Т, Горячева Техред Л,СердюковаКорректор н. ;ороль
Заказ 1099
ТиражПодписное
ВНИГОТИ Государственного комитета СССР
по делам изобретений и открытий I13035, Москва, , Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Способ регулирования процесса флотации в пневматической колонной машине и устройство для его осуществления | 1984 |
|
SU1214213A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Флотационная пневматическая машина | 1983 |
|
SU1118413A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
