н
«
ОС
со со
сигнал датчика 3 крутящего момента в цифровой код, Срабатьюает блок 5 сравнения,и вьщает сигнал на включение интегратора 7 и счетчика 9 угла поворота, при этом постоянно работает блок 8 дифференцирования. При достижении приращения угла поворота на выходе счетчика 9 угла поворота значения и f срабатывает второй блок 10 сравнения, который вьщает сигнал на запись в регистр значения М, соответствующего углу cf- поворота, включение блока 11 вычисления, интегратора 7 и блока 8 дифференцирования. На выходе интегратора 7 к это89972
му моменту времени сформируется дво- ичньй код, пропорциональный интегралу крутящего момента затяжки, а на выходе блока 8 дифференцирования - код, пропорциональный дифференциалу крутящего момента по углу поворота гайки резьбового соединения. Счетчик 12 угла поворота начнет отсчитывать
(О угол затяжки, начиная со значения . При достижении требуемого угла поворота срабатывает блок 13 сравнения и вьщает сигнал на вход блока 2 управления двигателем 1, который равляет торможением и остановкой двигателя 1, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гайковертом | 1987 |
|
SU1489973A1 |
| Способ сборки групповых резьбовых соединений | 1989 |
|
SU1738634A1 |
| Система управления гайковертом | 1986 |
|
SU1402421A1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381098C2 |
| Многошпиндельный гайковерт | 1983 |
|
SU1142814A1 |
| Устройство для управления катушками возбуждения электромагнитных муфт многошпиндельного гайковерта | 1984 |
|
SU1249480A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА ПНЕВМАТИЧЕСКИХ ГАЙКОВЕРТОВ | 2008 |
|
RU2394214C2 |
| Устройство контроля крутящего момента гайковерта | 1984 |
|
SU1234813A1 |
| ПНЕВМАТИЧЕСКИЙ ГАЙКОВЁРТ С ЭЛЕКТРОННЫМ КОНТРОЛЕМ МОМЕНТА | 2015 |
|
RU2598755C1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579343C1 |
Изобретение относится к области машиностроения, а именно к системам управления гайковертом. Цель изобретения является повышение точности за счет учета нелинейной зависимости крутящего момента от угла поворота гайки резьбового соединения. После включения блока 2 управления на двигатель 1 подается напряжение. Датчик 3 крутящего момента контролирует значение крутящего момента, а блок 4 измерения крутящего момента преобразует сигнал датчика 3 крутящего момента в цифровой код. Срабатывает блок 5 сравнения и выдает сигнал на включение интегратора 7 и счетчика 9 угла поворота, при этом постоянно работает блок 8 дифференцирования. При достижении приращения угла поворота на выходе счетчика 9 угла поворота значения *098д2 срабатывает второй блок 10 сравнения, который выдает сигнал на запись в регистр значения М 2, соответствующего углу δ2 поворота, включение блока 11 вычисления, интегратора 7 и блока 8 дифференцирования. На выходе интегратора 7 к этому моменту времени сформируется двоичный код, пропорциональный интегралу крутящего момента затяжки, а на выходе блока 8 дифференцирования - код, пропорциональный дифференциалу крутящего момента по углу поворота гайки резьбового соединения. Счетчик 12 угла поворота начнет отсчитывать угол затяжки, начиная со значения δ2. При достижении трубуемого угла поворота срабатывает блок 13 сравнения и выдает сигнал на вход блока 2 управления двигателем 1, который управляет торможением и остановкой двигателя 1. 1 ил.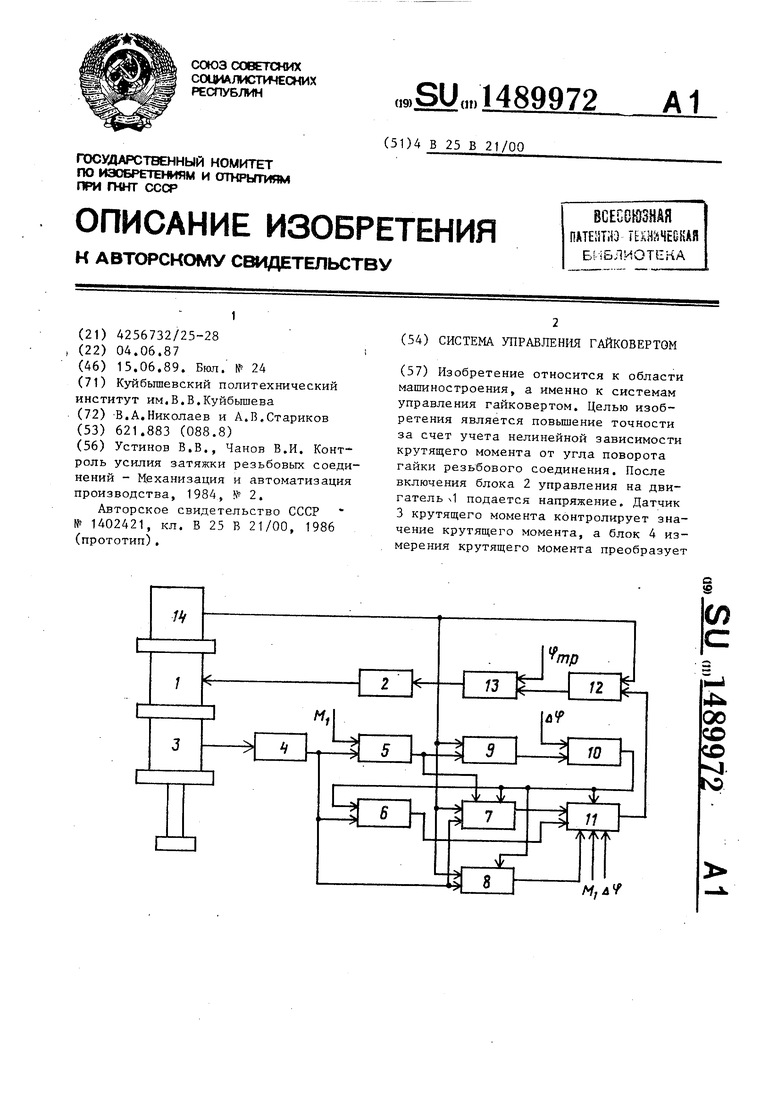
25
Изобретение относите к мапшно- 20 строению, а именно к системам управ ения гайковертами, и может быть исользовано в любой отрасли промышлен ости при сборке резьбовых соедине- ий.
Цель изобретения - повьшение точности за счет учета нелинейной зависимости крутящего момента, от угла пово- тора гайки резьбового соединения.
На чертеже изображена функциональ- ная схема системы управления гайковертом.
Система управления гайковертом содержит двигатель 1 с блоком 2 управления, датчиком 3 крутящего момента is с блоком 4 его измерения, первый блок 5 сравнения, регистр 6, интегратор 7, блок 8 дифференцирования, первьй счетчик 9 угла поворота, второй блок 10 сравнения, блок 11 вычисления, второй 40 счетчик 12 угла поворота, третий блок 13 сравнения и датчик 14 угла поворота..
Датчик 3 крутящего момента соединен с входом блока 4 измерения пос- 45 леднего. Выход блока 4 измерения крутящего момента соединен с входом блока 5 сравнения и с первыми входами регистра 6, интегратора 7 и блока 8 дифференцирования. На второй вход первого блока 5 сравнения подается двоичньй код, соответствующий значению момента М, Выход первого блока 5 сравнения подключен к первому входу первого счетчика 9 угла поворота и второму йходу интегратора 7,
Выход первого счетчика 9 угла поворота соединен с входом второго блока 10 сравнения, на другой вход
50
55
5
0
is0
5
0
5
которого подается код, соответствующий заданному приращению if угла поворота. Выход второго блока 10 сравнения подключен к первому входу блока 11 вычисления, второму входу регистра 6, третьему входу интегратора 7 и второму входу блока 8 дифференцирования. Выход интегратора 7 соединен с вторым входом блока 11 вычисления, к третьему входу которого подсоединен выход регистра 6, а к четвертому входу - выход блока 8 дифференцирования.
Выход блока 11 вычисления соединен с первым входом второго счетчика 12 угла поворота, выход которого связан с входом третьего блока 13 сравнения. На второй вход третьего блока 13 сравнения подается код, соответ- ствуняций требуемому значению угла .( затяжки.
Выход третьего блока 13 сравнения соединен с входом блока 2 управления двигателем 1, Выход датчика 14 угла поворота подключен к вторым входам первого и второго счетчиков 9 и 12 угла поворота, третьему входу блока 8 дифференцирования и четвертому входу интегратора 7.
Система управления гайковертом работает следукщим образом, , После включения блока 2 управления на двигатель 1 подается напряжение, соответствующее требуемому эна- чению скорости вращения двигателя 1, который приводит во вращение гайку резьбового соединения (не показано). .
Датчик 3 крутящего момента контролирует значение крутящего момента, приложенного к гайке резьбового соединения, а блок 4 измерения крутящего момента преобразует сигнал датчи- -ка 3 крутящего момента в цифровой код. На этапе затяжки резьбового соединения при достижении крутящим моментом значения М. срабатывает блок 5 сравнения и вьщает сигнал на включение интегратора 7 и счетчика 9 угла поворота. При этом постоянно работает блок 8 дифференцирования. При достижении приращением угла поворота на выходе счетчика 9 угла поворота значения л ( срабатывает второй блок 10 сравнения, который выдает сигнал на запись в регистр 6 значения М, соответствунлцего значению угла tf затяжки, включение блока 11 вычисления и включение интегратора 7 и блока 8
дифференцирования. На выходе интегра- 20интегратора, первьй блок сравнения
тора 7 к этому моменту времени сфор-выходом соединен с первым входом пермируется двоичный код, пропорциональ-вого счетчика угла и вторым входом
I гинтегратора, первый счетчик угла выный значению MdLf, а на выходе бло-ходом связан с входом второго блока
25
Ч , ка 8 дифференцирования - код, пропорdMционапьный значению j,, %
11 вычисления через интервал времени порядка нескольких десятков микросекунд вьщает на вход предварительной . установки счетчика 12 угла поворота вычисленное значение (f ,
После этого счетчик 12 угла пово- рота начинает отсчитывать угол затяжки, начиная со значения q . При достижении углом затяжки значения Ц то срабатывает блок 13 сравнения и выдает сигнал на вход блока 2 управления двигателем 1, который управляет торможением и остановкой двигателя 1.
Изобретение в результате применения для расчета предварительного угла затяжки,, зависимости, учитьшающей нелинейную взаимосвязь крутящего момента и угла затяжки, позволяет определять эту величину с точностью
30
35
40
45
сравнения, подключенного выходом к первому входу блока вычисления, второму входу регистра и третьему входу интегратора, соединенного выходом с вторым входом блока вычиdлeния, подсоединенного третьим входом к выходу регистра, блок вычисления выходом соединен с первым входом второго счетчика угла, связанного выходом с входом третьего блока сравнения, подключенного выходом к входу блока управления двигателем, датчик угла поворота выходом подсоединен к вторым входам первого и второго счетчиков угла и четвертому входу интегратора, отличающаяся тем, что, с целью повышения точности, она снабжена блоком дифференцирования, соединенным первым входом с выходом блока измерения крутящего момента, вторым входом - с выходом второго блока сравнения, третьим входом - с выходом датчика угла поворота, а выходом- с четвертым входом блока вычисления.
Редактор И.Касарда
Составитель И.Лихачев
Техред Л.Сердюкова Корректор И.Муска
Заказ 3625/20
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
порядка ± 2% и повысить точность достижения требуемого значения усилия затяжки резьбового соединения. Пог- рещность при этом не превышает + 8% от требуемого значения.
Формула изобретения
Система управления гайковертом, содержащая размещенные на выходном валу двигателя датчики угла поворота и крутящего момента, блок управления двигателем, первый, второй и третий блоки сравнения, регистр, интегратор, первый и второй счетчики угла поворота, блок вычисления, блок измерения крутящего момента, соединенный выходом с входом первого блока сравнения и первыми входами регистра и
сравнения, подключенного выходом к первому входу блока вычисления, второму входу регистра и третьему входу интегратора, соединенного выходом с вторым входом блока вычиdлeния, подсоединенного третьим входом к выходу регистра, блок вычисления выходом соединен с первым входом второго счетчика угла, связанного выходом с входом третьего блока сравнения, подключенного выходом к входу блока управления двигателем, датчик угла поворота выходом подсоединен к вторым входам первого и второго счетчиков угла и четвертому входу интегратора, отличающаяся тем, что, с целью повышения точности, она снабжена блоком дифференцирования, соединенным первым входом с выходом блока измерения крутящего момента, вторым входом - с выходом второго блока сравнения, третьим входом - с выходом датчика угла поворота, а выходом- с четвертым входом блока вычисления.
Подписное
| Устинов В.В., Чанов В.И | |||
| Контроль усилия затяжки резьбовых соединений - Механизация и автоматизация производства, 1984, № 2 | |||
| Система управления гайковертом | 1986 |
|
SU1402421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
