Изобретение относится к машиностроению, а именно к системам управления гайковертом и может быть использовано в любой отрасли при сборке резьбовых соединений.
Цель изобретения - повышение производительности за счет увеличения скорости вращения исполнительного механизма.
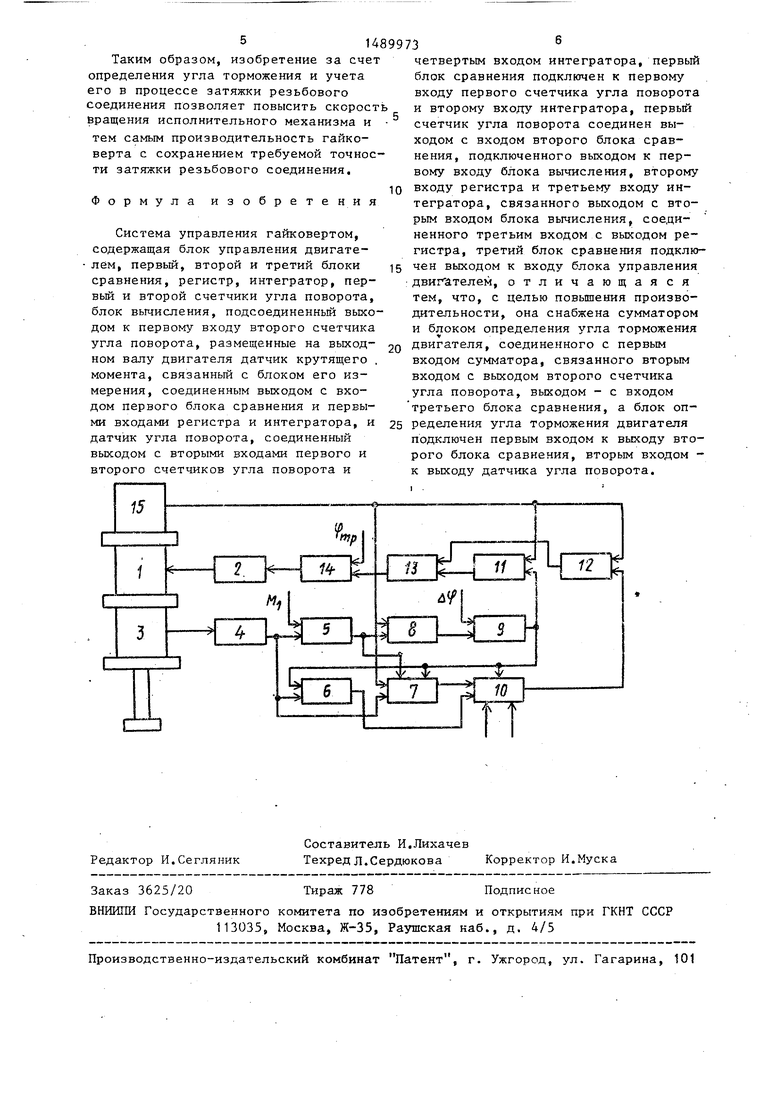
На чертеже изображена функциональная схема системы управления гайковертом.
Система управления гайковертом содержит двигатель 1 с блоком 2 управления, датчик 3 крутящего момента, блок 4 измерения последнего, первый блок 5 сравнения, регистр 6, интегратор 7, первый счетчик 8 угла поворота, второй блок 9 сравнения, блок 10 вычисления, блок 11 определения угла тормбжения двигателя 1, второй счетчик 12 угла поворота, сумматор 13, третий блок 14 сравнения, датчик 15 угла поворота.
Датчик 3 крутящего момента соединен со входом блока 4 измерения последнего. Вькод блока 4 измерения кру тящего момента соединен со входом блока 5 сравнения и с первыми входам регистра 6 и интегратора 7, На второ вход первого блока 5 сравнения подается двоичный код, соответствующий значению момента М . Выход первого блока 5 сравнения подключен к первому входу первого счетчика 8 угла поворота и второму входу интегратора 7« Выход первого счетчика 8 угла по- ворота соединен со входом второго блока 9 сравнения, на другой вход которого подается код, соответствующий заданному приращению угла Л (.( поворота. Выход второго блока 9 срав нения подключен к первым входам блока 10 вычисления и блока 11 определения угла Cf торможения двигателя 1, второму входу регистра 6, третьему входу интегратора 7, Выход интегратора 7 соединен со вторым входом блока 10 вычисления, к третьему входу которого подсоединен выход регист ра 6, Выход блока 10 вычисления соединен с первым входом второго счетчика 12 угла поворота, выход которого связан с первым входом сумматора 13, Ко второму входу последнего подключен выход блока 11 определения угла торможения двигателя 1, Выход сумматора 13 соединен со входом третьего блока 14 сравнения, на другой вход которого подается код, соответствующий требуемому значению угла
-затяжки. Выход третьего блока 14 сравнения соединен со входом блока 2 управления двигателя 1, Выход датчика 15 угла поворота подключен ;ко вторым входам первого и второго счетчиков 8 и 12 угла поворота, второму входу блока 11 определения угла торможения двигателя 1 и четвертому входу интегратора 7,
Система управления гайковертом работает следующим образом.
После включения блока 2 управлени на двигатель 1 подается напряжение, соответствующее требуемому значению скорости вращения двигателя 1, кото-
Q 5 20 25
30
5
0
5
0
5
рый приводит во вращение гайку резьбового соединения (на чертеже не показаны) ,I
Датчик 3 крутящего момента контролирует значение крутящего момента, приложенного к гайке резьбового соединения, а блок 4 измерения крутящего момента преобразует сигнал датчика 3 крутящего момента в цифровой код. На этапе затяжки резьбового соединения при достижении крутящим моментом значения М срабатьшает блок 5 сравнения и вьщает сигнал на включение интегратора 7 и счетчика 8 угла поворота. При достижении приращением угла поворота на выходе счетчика 8 угла поворота значения d f/ срабатьгеает второй блок 9 сравнения, который выдает сигнал на запись в регистр 6 : значения момента М, соответствующего значению угла затяжки q , включение блоков 10 вычисления и 11 определения угла cf торможения двигателя 1 и выключение интегратора 7, который к этому времени сформирует на ; своем выходе код, пропорциональньш
значению Mdi. Блок 10 вычисления через интервал времени порядка
нескольких десятков микросекунд выдает на вход предварительной уста«ов- ки счетчика 12 угла поворота вычисленное значение if После чего счетчик 12 угла поворота начнет отсчитывать угол затяжки, начиная со значения (/. Одновременно блок 11 определения угла торможения двигателя 1 преобразует сигнал датчика 15 угла поворота в цифровой код, пропорциональньй текущему значению угла с/ торможения.
Сигналы текущих значений угла { затяжки и угла t/ торможения поступают на входы сумматора 13, который определяет сумму Lf + ц. При достижении суммой углов (/+ kfj значения срабатывает третий блок 14 сравнения и вьщает сигнал на вход блока 2 управления двигателя 1, кото- рьй управляет торможением и остановкой двигателя 1. В процессе торможения вал двигателя с исполнительным механизмом довернется на угол q , в , результате, чего будет достигнуто требуемое значение угла i/. затяжки резьбового соединения.
Таким образом, изобретение за счет пределения угла торможения и учета го в процессе затяжки резьбового оединения позволяет повысить скорость ращения исполнительного механизма и тем самым производительность гайковерта с сохранением требуемой точности затяжки резьбового соединения.
Формула изобретения
Система управления гайковертом, содержащая блок управления двигате- лбм, первый, второй и третий блоки сравнения, регистр, интегратор, пер- вьй и второй счетчики угла поворота, блок вычисления, подсоединенный выходом к первому входу второго счетчика угла поворота, размещенные на выходном валу двигателя датчик крутящего . момента, связанный с блоком его измерения, соединенным выходом с входом первого блока сравнения и первыми входами регистра и интегратора, и датчик угла поворота, соединенный выходом с вторыми входами первого и второго счетчиков угла поворота и
четвертым входом интегратора, первый блок сравнения подключен к первому входу первого счетчика угла поворота и второму входу интегратора, первьй счетчик угла поворота соединен выходом с входом второго блока сравнения, подключенного выходом к первому входу блока вычисления, второму
0 входу регистра и третьему входу интегратора, связанного выходом с вторым входом блока вычисления, соединенного третьим входом с выходом регистра, третий блок сравнения подклю5 чен выходом к входу блока управления двигателем, отличающаяся тем, что, с целью повышения производительности, она снабжена сумматором и блоком определения угла торможения двигателя, соединенного с первым входом сумматора, связанного вторым входом с выходом второго счетчика угла поворота, выходом - с входом третьего блока сравнения, а блок оп5 ределения угла торможения двигателя подключен первым входом к выходу второго блока сравнения, вторым входом - к выходу датчика угла поворота.
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ сборки групповых резьбовых соединений | 1989 |
|
SU1738634A1 |
| Система управления гайковертом | 1987 |
|
SU1489972A1 |
| Система управления гайковертом | 1986 |
|
SU1402421A1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381098C2 |
| Способ управления пневматическим гайковертом и устройство для его осуществления | 1990 |
|
SU1776554A1 |
| Устройство для управления катушками возбуждения электромагнитных муфт многошпиндельного гайковерта | 1984 |
|
SU1249480A1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579343C1 |
| Многошпиндельный гайковерт | 1983 |
|
SU1142814A1 |
| Система управления электрическим гайковертом | 1987 |
|
SU1482783A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА ПНЕВМАТИЧЕСКИХ ГАЙКОВЕРТОВ | 2008 |
|
RU2394214C2 |
Изобретение относится к системам управления гайковертом. Цель изобретения - повышения производительности за счет увеличения скорости вращения исполнительного механизма. При включении блока 2 управления на двигатель 1 подается напряжение, соответствующее требуемой скорости вращения двигателя 1, который приводит во вращение гайку резьбового соединения. Датчик 3 крутящего момента контролирует величину крутящего момента, приложенного к гайке резьбового соединения, а блок 4 измерения крутящего момента преобразует сигнал датчика 3 крутящего момента в цифровой код. На этапе затяжки резьбового соединения при достижении крутящим моментом величины μ1 срабатывает блок 5 сравнения и выдает сигнал на включение интегратора 7 и счетчика 8 угла поворота, а при достижении на последнем приращения угла поворота δ2 срабатывает второй блок 9 сравнения, который выдает сигнал на запись в регистр 6 момента μ2, соответствующего углу затяжки δ2, включение блока 10 вычисления и блока 11 определения угла δт торможения двигателя и выключение интегратора 7. Сигналы текущих значений угла *δ затяжки и угла δт торможения поступают на входы сумматора 13. При достижении суммы этих углов, равной δт, срабатывает третий блок 14 сравнения и выдает сигнал на вход блока 2, который управляет торможением и остановкой двигателя 1. В процессе торможения вал двигателя с исполнительным механизмом довернется на угол δт, в результате чего будет достигнуто требуемое значение угла δ*тр затяжки резьбового соединения. 1 ил.
| Устинов В.В | |||
| и Чанов В.И | |||
| Контроль усилия затяжки резьбовых соединений, - Механизация и автоматизация производства | |||
| М., 1984, № 2 | |||
| Система управления гайковертом | 1986 |
|
SU1402421A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
