срие t
Изобретение относится к машиностроению j а именно к системам управления гайковертами, и может быть использовано в любой отрасли промгз1ш- ленности при сборке резьбовых соединений.
Целью изобретения является ловыше- ние точности путем интегральной оценки угла поворота гайки резьбового соединения.
На фиг. 1 изображена функциональная схема системы управления гайко- BepTOMj на фиг, 2 - зависимость крутящего момента М на ключе и усилия затяжки Q от угла if затяжки гайки резьбового соединения
Система управления гайковертом содержит двигатель 1 с блоком 2 управления, датчик 3 крутящего момента,, блок 4 измерения последнего, первый блок 5 сравнения, регистр 6, интегратор 7, первьЕй счетчик 8 угла поворота, второй блок 9 сравнения,, блок 10 вычисленияJ второй счетчик И угла поворота,, третий блок 12 сравнения и датчик 13 угла поворота о
Датчик 3 крутящего момента соединен с входом блока 4 измерения последнего Цифровой кодэ пропорциональный измеренному значен «) крутящего момента, поступает на вход первого блока 3 сравнений,. Выход блока 4 измерения р;рутящгго момента соединен с первыми входами регистра 6 и интег раторо г 7. I s второй вход первого блока 5 сразяения подается двоичный код, соответствующий значению момента М,. Выход блока 5 сравнения подключен к первому входу ггервого счетчика 8 угла поворота и второму входу интегратора 7,; Выход первого счетчика
8угла поворота соедин гн с входом второго блока 9 сравнения, на друх ой вхо.ц которого подается код., соот- ветствуняций заданному приращению угла и Ч поворота. Выход второго блока
9сравнения подключен к первому входу блока 10 вычисления,, второму входу регистр З- 6 и третьему входу интегратора 7 J выход которого соединен с вторым входом блока 10 вычисления,, К третьему входу блока 10 рычисления подсоед1-$нен выход регистра 5, Выход блока 10 вычислания соединен с первьм входом второго счетчика 11 угла по- ворота. Выход второго счетчика 11 угла i ioBcpoTa связан с входом третьего блока 12 сравнения, а выход пос
0
5
0
5
0
0
5
леднего соединен с входом блока 2 управления двигателя 1. Выход датчика 13 угла поворота подключен к вторым входам первого 8 и второго 11 счетчиков угла поворота и четвертому входу интегратора 7,
Система управления гайковертом работает следуюпдим образом.
После включения блока 2 управления на двигатель 1 подается напряжение, соответствующее требуемому значению скорости вращения двигателя 15 который приводит во вращение гайку резьбового соединения.
Датчик 3 крутящего момента контролирует значение крутяв;его момента, приложенного к гайке резьбового соединения, а блок 4 измерения крутящего момента преобразует сигнал датчика 3 крутящего момента в цифровой код. На этапе затяжки резьбового соединения при достижении крутящим моментом значения М,, срабатывает блок 5 сравнения и выдает сигнал на включение интегратора 7 и счетчика 8 угла поворота. При достижении приращением угла поворота на выходе счетчика 8 угла поворота значения Lf сраба- тьшает второй блок 9 сравнения, который вь;,цает сигьал на запись в регистр 6 значения момента М,2,- соответствующего значению угла затяжки q, включение блока 10 вычисления и выключение интегратора 7, который к этому времени формирует на своем выходе код значений, пропорциональных
. 7
значению J Блок 10 вычисления
Ч ,
через интервал времени порядка не- скольких десятков микросекунд вьщает на вход предварительной установки счетчика 11 угла поворота вычисленное по формуле значение
f
J , Adif-M,-ii(f
После чего счетчик 1 угла поворота .отсчитывает угол затяжки начиняя со з,ий-:гсння 1 „ При достижении уг лом зз.тя7,:ки значения , срабатывает третий блок 12 сравь ения и выдает сигнал на вход блока 2 угравления двигателя 1 который управляе ., тормо- лее.ккем и остановкой двигателя 1,.
Такик образом, в результате гфиме- нения для расчета предварительного
тр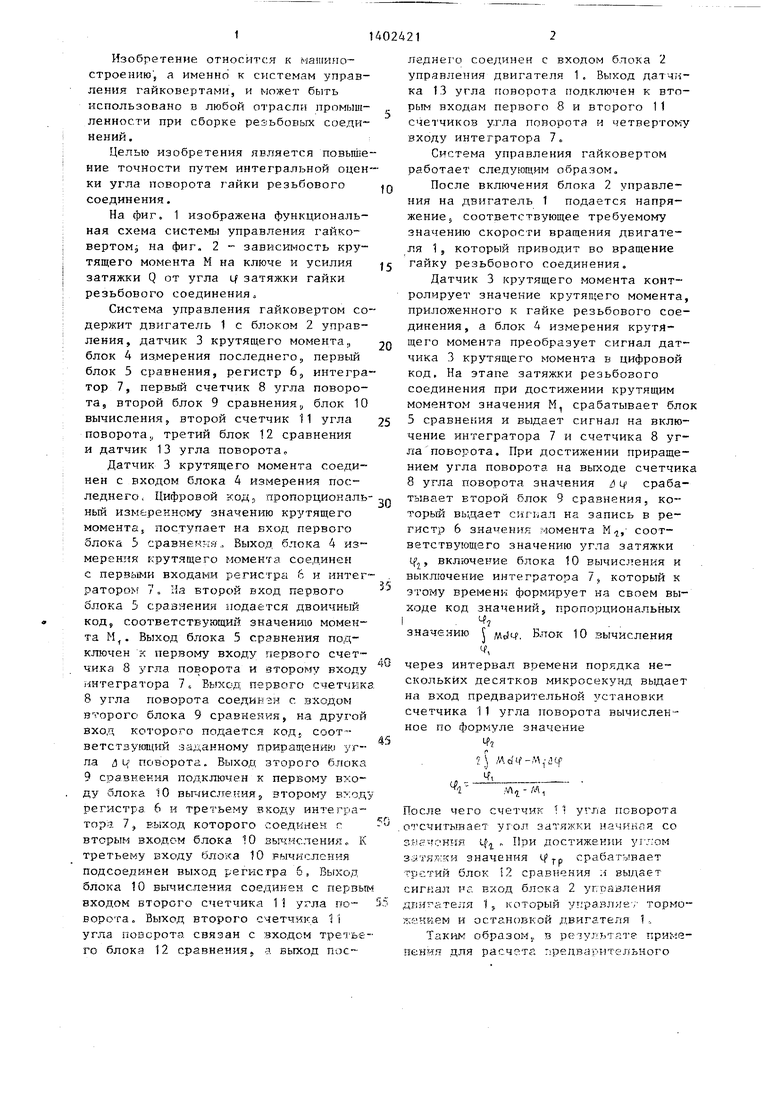

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гайковертом | 1987 |
|
SU1489972A1 |
| Система управления гайковертом | 1987 |
|
SU1489973A1 |
| Способ сборки групповых резьбовых соединений | 1989 |
|
SU1738634A1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381098C2 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579343C1 |
| Устройство для управления катушками возбуждения электромагнитных муфт многошпиндельного гайковерта | 1984 |
|
SU1249480A1 |
| Многошпиндельный гайковерт | 1983 |
|
SU1142814A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ КРУТЯЩЕГО МОМЕНТА ПНЕВМАТИЧЕСКИХ ГАЙКОВЕРТОВ | 2008 |
|
RU2394214C2 |
| Многошпиндельный гайковерт | 1984 |
|
SU1232468A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОСЕВОЙ СИЛЫ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429457C1 |
| Способ сборки резьбового соединения и устройство для его осуществления | 1978 |
|
SU1050554A3 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устинов В.В., Чанов В.И | |||
| Контроль усилия затяжки резьбовых соединений.- Механизация и автоматизация производства, 1984, № 2. | |||
