гз
о
4
СЛ
СО
20
3 149
Изобретение относится к электро- тех1шке, к магнитоэлектрическим шаго- пьпч двигателям индукторного типа с торцовым рабочим зазором, однофаниой системой электропитания и гармоническим по принципу формирования кривой вращающимся моментом, предназначенным для применения в различных уст
ройствах записи и считывания информа- JQ ц вырезов 17 на зубцах 16. При проПоляризуюп1ий поток постоянного маг- мапшта 5 через диски 3, 4 магнитопро- вода 2 попадает в зубцы 10, 11 и 16 роторов 7, 8. При отсутствии тока в катушках 18-21 роторы 7, 8 фиксируются в определенном угловом положении за счет секторов1ад ых вьфезов (назон 14) и вырезов 15 на зубцах 10, 11
ц вырезов 17 на зубцах 16. При про
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1988 |
|
RU2030075C1 |
| Магнитоэлектрический двигатель | 1979 |
|
SU886156A1 |
| Магнитоэлектрический двигатель | 1979 |
|
SU832663A2 |
| Шаговый электродвигатель | 1989 |
|
SU1737654A1 |
| Однофазный шаговый электродвигатель индукторного типа и способ его сборки | 1985 |
|
SU1732414A1 |
| Универсальный шаговый электродвигатель | 1991 |
|
SU1831752A3 |
| Шаговый электродвигатель ГНОМ | 1987 |
|
SU1732415A1 |
| Синхронный электродвигатель | 1979 |
|
SU855880A1 |
| "Шаговый электродвигатель "Румфон - 2 @ " | 1988 |
|
SU1785066A1 |
| РЕАКТИВНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1987 |
|
RU2020700C1 |
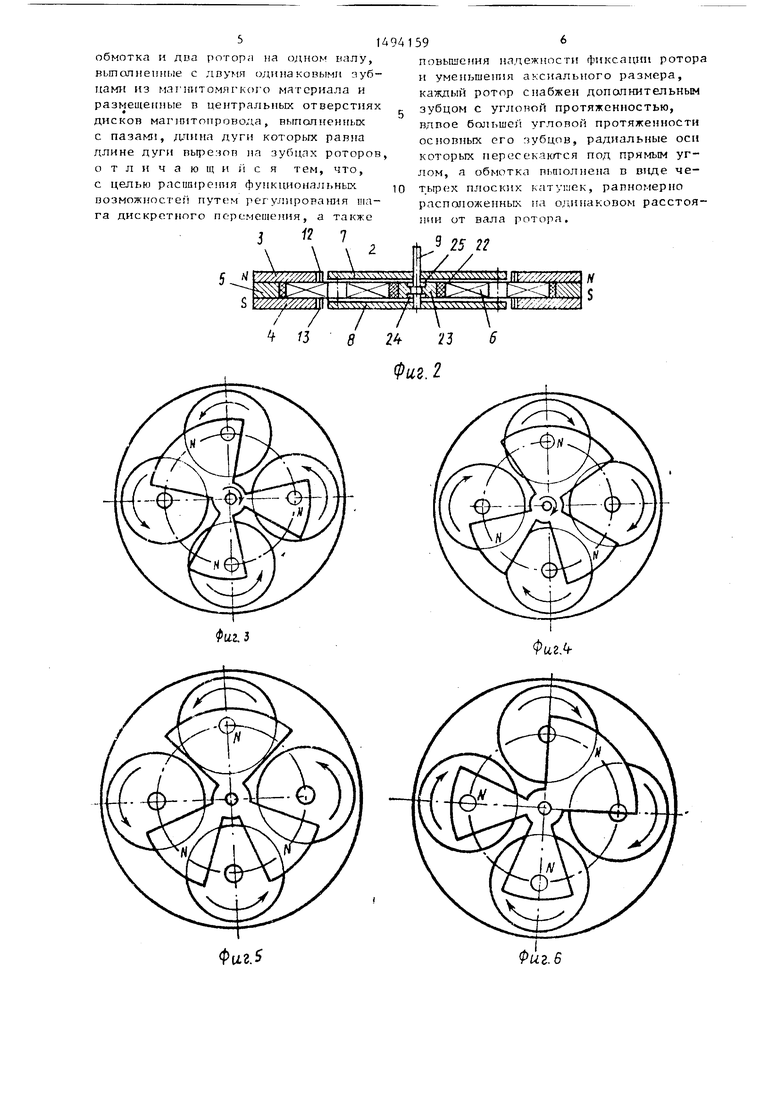
Изобретение относится к электротехнике, к шаговым электродвигателям и может быть использовано в устройствах записи, считывания информации. Цель состоит в расширении функциональных возможностей путем регулирования шага, а также в повышении надежности фиксации и уменьшении аксиального размера. Двигатель содержит статор 1 с магнитопроводами в виде двух параллельных дисков 3,4, между которыми установлен кольцевой постоянный магнит 5. Роторы выполнены с одинаковыми зубцами 10 и 11 и дополнительным зубцом 16, угловая протяженность, которого вдвое больше угловой протяженности зубцов 10 и 11. В дисках 3,4 выполнены пазы 14, длина дуги которых равна длине дуги вырезов 15 зубцов 10,11. Обмотка выполнена в виде четырех плоских катушек 18-21, равномерно расположенных на одинаковом расстоянии от вала роторов. В зависимости от взаимного направления тока в катушках 18-21 рабочий момент будет создаваться зубцами 10,11 или дополнительным зубцом 16, роторы будут вращаться соответственно с шагом φ/4 и φ/2. 10 ил.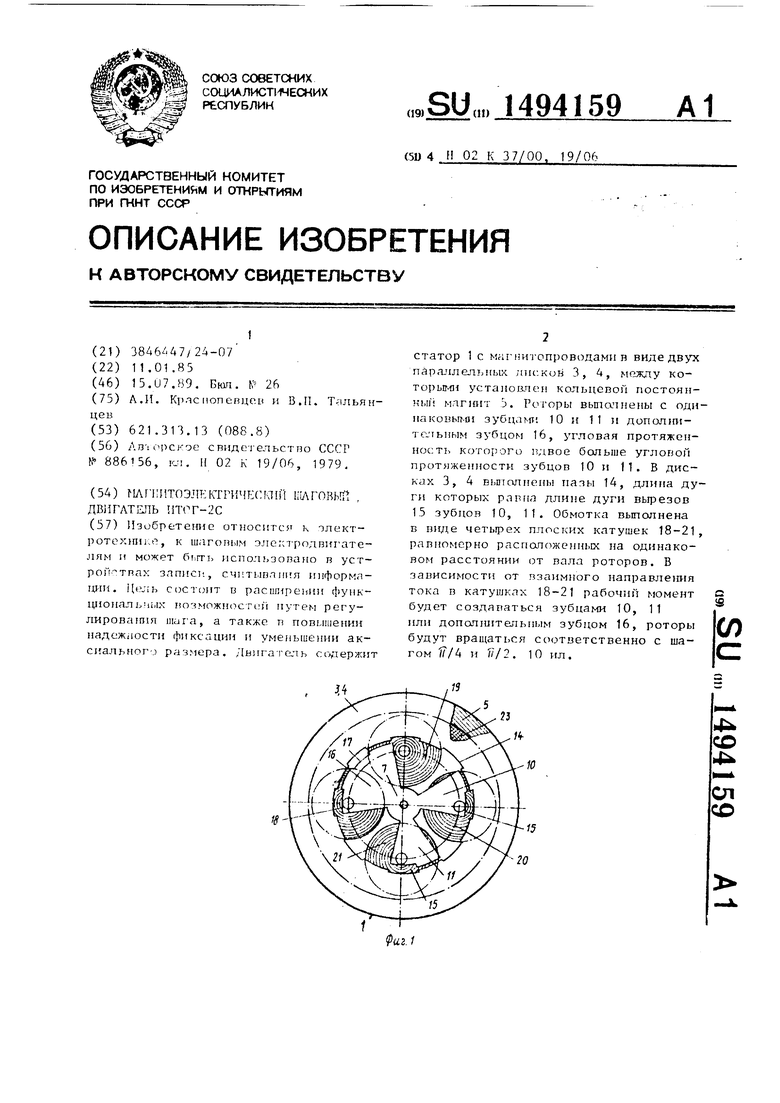
itjin.
Целью является paciimpeioie функциональных возможностей двигателей путем регулироваш1я шага, а также новышение надежности фиксации и уменьше- 5 коп катушек 18-21 усиливается или
ние аксиального размера.ослабевает: возникает вращаюирй моПа фиг. 1 представлен двигатель,мент, под действием которого роторы
план; на фиг. 2 - то же, продольный7 и 8 новорачпраются в такое ниюжсразрез; на фиг. 3-6 - схема работы
ние, при которо через их зубцы 10
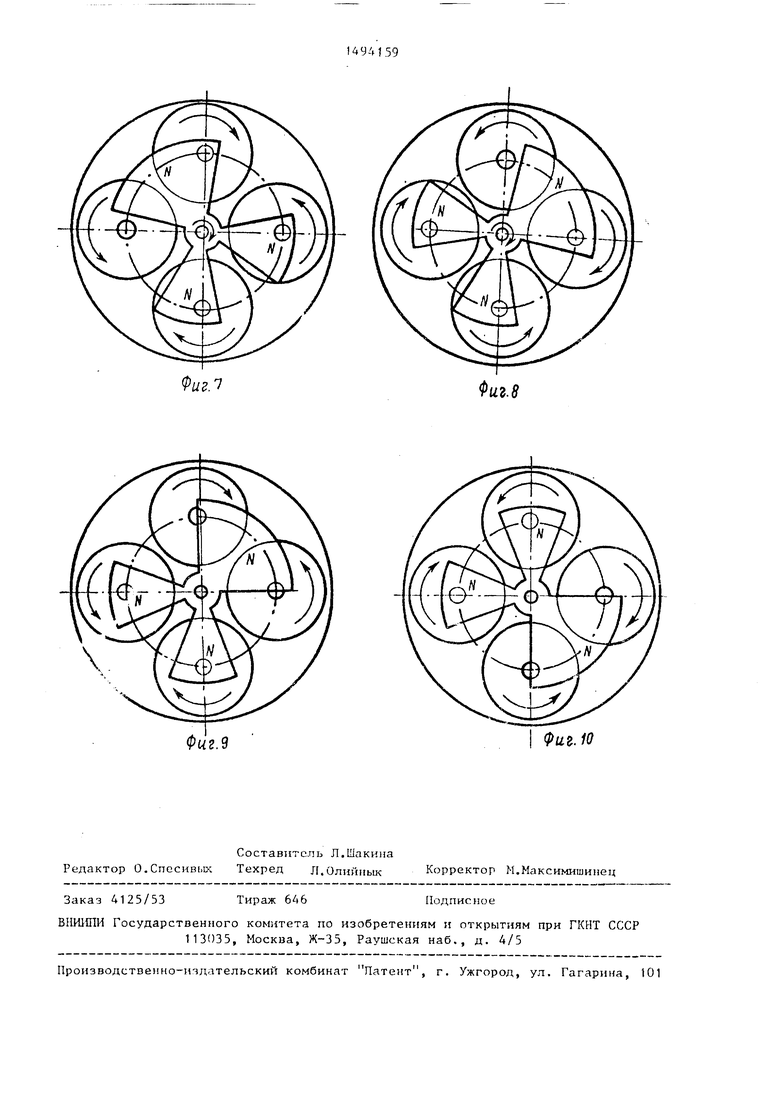
двигателя с шагом 7f/4; ил фиг. 7-10 - 20 п 11 Г11)оходит г.;аксимлльны1 м:
то же, с шагом /2,
Индукторньм торцовоГ одиоф.к иьа ; гармо1шчес1а1й двухскоростноГ) дьига- тель ИТОГ-2С содержит статор 1 с с магнитопроводом 2 в виде двух параллельных дисков 3, 4, между которыми установлен кольцевой ностоянный магнит 5 с осевой намагш1чеи юстью, одновремешю CJi oKaugni корпусом двигателя, а внут)и него обмоп ка 6 и два 30 ротора 7, 8 на одном валу 9, вьпюл- ненные с одинаковыми зубцаг-ni 10, 11 из магнитомягкого материалл и рзз- MeuieHHhie в центральных отверстиях 12. 13 дисков 3, 4 магнитопровода 2. В дисках 3, 4 выполнены пазы 1Д, дли на дуги которых (f/ /B) равна длине дуги вырезов 13 на зубцах 10, 11 рото- ров 7, 8. Каждый ротор имеегг дополнительный зубец 16 с угловой протяжен- Q ностью (1г /2), вдвое большей угловой протяженности основных зубцов 10, II (17/4). На допаинитс льном зубце 16 тоже имеютст вырезы 17, одинаковые iro угловой протяженности (/8) с выреза- Nfli 15 на осиовиьгх .зубцах 10 и 11. Рад1 альные оси оспояных зубцов 10, 11 пересекаются под прямым углом. . Обмотка вьитаанена в виде четырех плоских катушек 18-21, равномерно расположенш.гх на одинаковом расстоя- ган1 от вала 9 роторов 7, Н. Катушки 18-21 размещены Н.1 изолирующем каркасе 22, в котором закреплен; птулк, 23 с установлсчшыми в ней нодпнишнка- ми 24, 25.
Работа Д1 игате:1:1 осуществляется ел едукм1у1м обрп HIM.
агнитный ноток (см. фиг. 3-10). При опре- /lejieiiiioii пачярности тока в катупн.а 18-21 (фиг. 3-6) роторы 7, 8 смещаются в повое паложение равновесия (по25 реходят из ноложеиия по фиг. 3 в положение по фиг. 4), т.е. поворачиваются на угол, 6ojib mu i половины меньшего шага (больший fiVS) . После исчезновеш1я тока в катушках 18-21 роторы 7,8 под де11стяпем vieaKTHBHori) момента фиксации поворачиваются до новот о положения ycToiniitBoro равновесия (переходят в папоже1ше по фиг. 5), завершая таким образом шаг
.jc с протяжс нност11ю м/4 (фиг. 6). С изменением иаправлрттия тока области усиления и ослаб:1е ия полпризую:ле- го пото:;а меняктгся местами и рогоры 7, 8 отрабатывают следующий штг.
Если взаимное наггравление тока в четырех катушках 18-21 будет соот- нптствовать показанному на фиг. 7-10 то рабочий момент будет создаваться зубцом 16, (а не зуб1 ;:г-01 10., 11) и роторы будут ь оремеи зться с шагом t 7 2.
Таким образ{)М обеспечивается возможность регулирования шага при дискретном перемещении. При этом повышается надежность фиксащп ротора и уменьшение аксиал} ного размера.
Формула изобретения
Магш1тоэлел тру ческий 1и агов1 1Й двигатель, содержапи1й статор с магнито- проиодом в виде двух пapaJIлeльtiьгx дисков, между которы И уста1швлен качьцевой ностоянный магнит с oceBoii 1гамаг 1ПЧРнностью, а него 45
50
текании тока в катушках 18-21 ноз- ifflKaeT магнитньш поток, взаимодей- ствую1п;ий с поляризуюш м потоком магнита 5. MariuiTHoe ноле в области витние, при которо через их зубцы 10
п 11 Г11)оходит г.;аксимлльны1 м:
0 п 11 Г11)оходит г.;аксимлльны1 м:
0 Q
агнитный ноток (см. фиг. 3-10). При опре- /lejieiiiioii пачярности тока в катупн.а 18-21 (фиг. 3-6) роторы 7, 8 смещаются в повое паложение равновесия (по5 реходят из ноложеиия по фиг. 3 в положение по фиг. 4), т.е. поворачиваются на угол, 6ojib mu i половины меньшего шага (больший fiVS) . После исчезновеш1я тока в катушках 18-21 роторы 7,8 под де11стяпем vieaKTHBHori) момента фиксации поворачиваются до новот о положения ycToiniitBoro равновесия (переходят в папоже1ше по фиг. 5), завершая таким образом шаг
c с протяжс нност11ю м/4 (фиг. 6). С изменением иаправлрттия тока области усиления и ослаб:1е ия полпризую:ле- го пото:;а меняктгся местами и рогоры 7, 8 отрабатывают следующий штг.
Если взаимное наггравление тока в четырех катушках 18-21 будет соот- нптствовать показанному на фиг. 7-10, то рабочий момент будет создаваться зубцом 16, (а не зуб1 ;:г-01 10., 11) и роторы будут ь оремеи зться с шагом t 7 2.
Таким образ{)М обеспечивается возможность регулирования шага при дискретном перемещении. При этом повышается надежность фиксащп ротора и уменьшение аксиал} ного размера.
Формула изобретения
Магш1тоэлел тру ческий 1и агов1 1Й двигатель, содержапи1й статор с магнито- проиодом в виде двух пapaJIлeльtiьгx дисков, между которы И уста1швлен качьцевой ностоянный магнит с oceBoii 1гамаг 1ПЧРнностью, а него 5
0
5
5 f 7
XXX y УZ TIiL O v л yч
35 24
Фи.г.3
Фиг. 5
Фи2.2
агЛ
Фиг. 6
РигЛ
Фи.д
Составитель Л.Шакина Редактор О.Спесивых Техред Л.Олийиык
Заказ 4125/53
Тираж 646
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Фиг.8
Фиг. 10
Корректор М.Максимишинец
Подписное
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
