.ff
н2й
,
. г
П
со
4:
СО
ел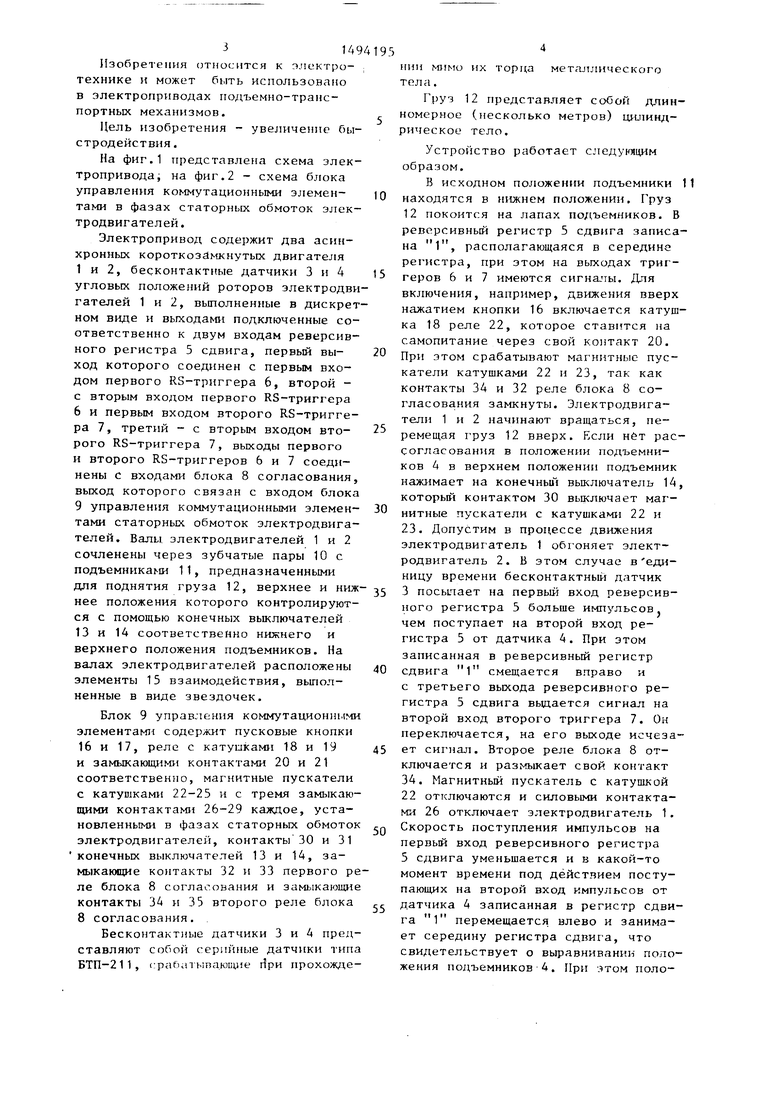
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шнекового питателя | 1990 |
|
SU1777224A1 |
| Многодвигательный электропривод конвейеров | 1987 |
|
SU1555791A1 |
| Устройство сопровождения и адресования объектов на конвейере | 1990 |
|
SU1813687A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОНАСОСНЫМ АГРЕГАТОМ | 2010 |
|
RU2447236C2 |
| Устройство для управления сортировкой бревен | 1988 |
|
SU1558516A2 |
| Устройство управления кипным питателем с верхним отбором волокна | 1986 |
|
SU1392153A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Многодвигательный электропривод | 1986 |
|
SU1381681A1 |
| Устройство для торможения противовключением трехфазного асинхронного электродвигателя | 1988 |
|
SU1577044A1 |
| Светоловушка для уничтожения насекомых | 1989 |
|
SU1685346A1 |

Изобретение относится к электротехнике и может быть использовано в электроприводах подъемно-транспортных механизмов. Целью изобретения является увеличение быстродействия. Синхронизация электродвигателей достигается за счет реверсивного регистра 5 сдвига, выходами соединенного с RS -триггерами 6 и 7, выходы которых соединены с блоком 8 согласования, выход последнего связан с блоком 9 управления коммутационными элементами в фазах статорных обмоток электродвигателей. Входы реверсивного регистра 5 сдвига подключены к бесконтактным датчикам 3 и 4, связанным с элементами 15 взаимодействия, выполненными в виде звездочек. При работе электропривода в реверсивный регистр 5 сдвига от бесконтактных датчиков 3, 4 поступают импульсы, в зависимости от соотношения которых вырабатываются регулирующие воздействия на электродвигатели. 2 ил.
I
Фи. I
3149
Изобретения (относится к электротехнике н может быть использовано в электроприводах подъемно-транспортных механизмов.
Цель изобретения - уве;и1ченпе быстродействия .
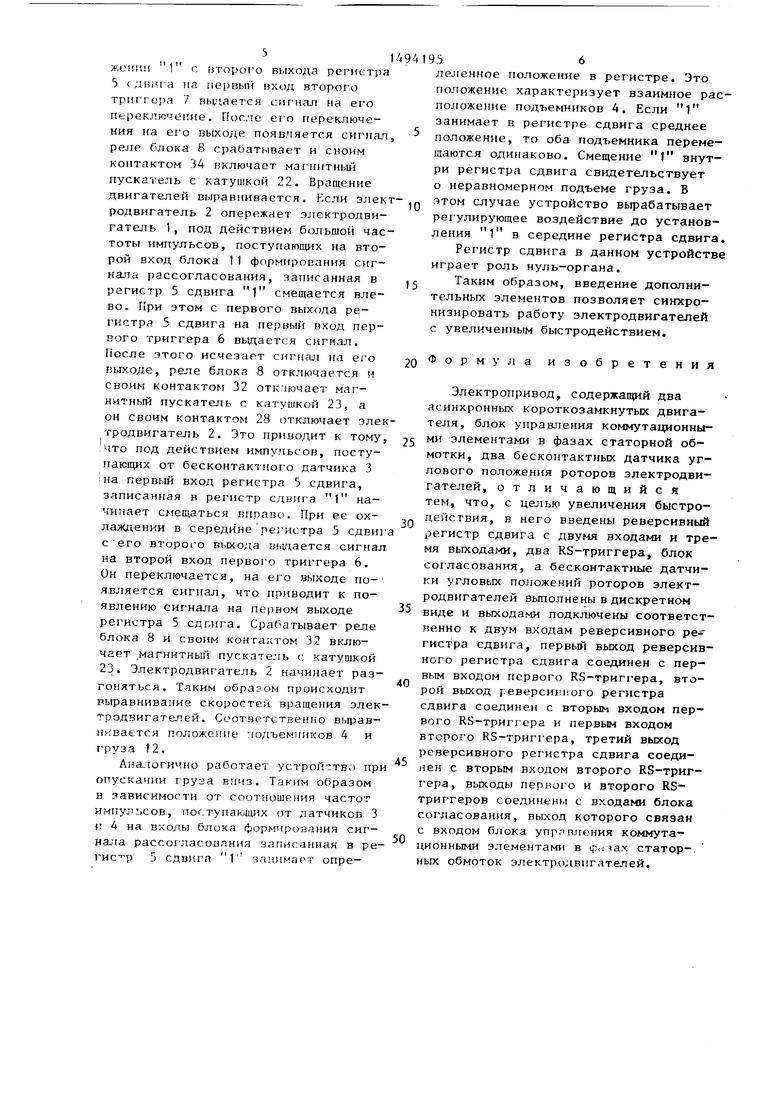
На фиг.1 представлена схема электропривода, на фиг.2 - схема блока управления коммутационными элементами в фазах статорных обмоток электродвигателей.
Электропривод содержит два асинхронных короткоз мкнутых двигателя 1 и 2, бесконтактные датчики 3 и 4 угловых положений роторов электродвигателей 1 и 2, выполненные в дискретном виде и выходами подключенные соответственно к двум входам реверсивного регистра 5 сдвига, первый выход которого соединен с первым входом первого RS-триггера 6, второй - с вторым входом первого RS-триггера 6 и первым входом второго RS-триггера 7, третий - с вторым входом второго RS-триггера 7, выходы первого и второго RS-триггеров 6 и 7 соединены с входами блока 8 согласования, выход которого связан с входом блока 9 управления коммутационными элементами статорных обмоток электродвигателей. Валы электродвигателей 1 и 2 сочленены через зубчатые пары 10 с подъемниками 11, предназначенными для поднятия груза 12, верхнее и нижнее положения которого контролируются с помощью конечных выключателей 13 и 14 соответственно нижнего и верхнего положения подъемников. На валах электродвигателей расположены элементы 15 взаимодействия, выполненные в виде звездочек.
Блок 9 управления коммутацион 1.1ми элементами содержит пусковые кнопки 16 и 17, реле с катушками 18 и 19 и замыкающими контактами 20 и 21 соответственно, магнитные пускатели с катупжами 22-25 и с тремя замыкающими контактами 26-29 каждое, установленными в фазах статорных обмоток электродвигателей, контакты 30 и 31 конечных выключателей 13 и 14, замыкающие ко}1такты 32 и 33 первого реле блока 8 согласования и замыкающие контакты 34 и 35 второго реле блока 8 согласования.
Бесконтакт)п,1е датчики 3 и 4 представляют собой серийные датчики типа БТП-211, срабатыпаюии е г5ри прохожде195
0
5
0
5
0
5
0
5
НИИ мимо их торца металлического тела.
Груз 12 представляет собой длинномерное (несколько метров) цилиндрическое тело.
Устройство работает с.чедую1цим образом.
В исходном положении подъемники 11 находятся в Н1«(нем положении. Груз 12 покоится на лапах подъемников. В реверсивный регистр 5 сдвига записана 1, располагающаяся в середине регистра, при этом на выходах триггеров 6 и 7 имеются сигналы. Для включения, например, движения вверх нажатием кнопки 16 включается катушка 18 реле 22, которое ставится на самопитание через свой контакт 20. При этом срабатывают магнитные пускатели катушками 22 и 23, так как контакты 34 и 32 реле блока 8 согласования замкнуты. Электродвигатели 1 и 2 начинают вращаться, перемещая груз 12 вверх. Если нет рассогласования в положении подъемников 4 в верхнем положении подъемник нажимает на конечньи выключатель 14, который контактом 30 выключает магнитные пускатели с катушками 22 и 23. Допустим в процессе движения электродвигатель 1 обгоняет электродвигатель 2. В этом случае в единицу времени бесконтактньм датчик 3 посьшает на первый вход реверсивного регистра 5 больше импульсовj чем поступает на второй вход регистра 5 от датчика 4. При этом записанная в реверсивный регистр сдвига 1 смещается вправо и с третьего выхода реверсивного регистра 5 сдвига вьщается сигнал на второй вход второго триггера 7. Он переключается, на его выходе исчезает сигнал. Второе реле блока 8 отключается и разгиыкает свой контакт 34. Магнитный пускатель с катущкой 22 отключаются и силовыми контактами 26 отключает электродвигатель 1. Скорость поступления импульсов на первый вход реверсивного регистра 5 сдвига уменьшается и в какой-то момент времени под действием поступающих на второй вход импульсов от датчика 4 записанная в регистр сдвига 1 перемещается влево и занимает середину регистра сдвига, что свидетельствует о выравнивании положения подъемников 4. При этом положонии l г, второго выхода регистра 5 ( двиг а на первый пход второго триггера 7 вьу);ается сигнал на его переключ(1:не. После ei o переключения на ei o выходе появляется сигнал реле блока 8 срабатывает и своим контактом 34 включает магнитный пускатель с катушкой 22. Вращение двигателей выравнивается. Если электродвигатель 2 опережает электродвигатель 1, под действием большой частоты импульсов, поступающих на второй вход блока 11 формирования сигнала рассогласования, записанная в регистр 5 сдвига 1 смещается влево , При этом с первого выхода регистра 5 сдвига на первый вход первого триггера 6 вьщается сигнал. После этого исчезает CHrt{c ui на его выходе, реле блока 8 отключается и своим контактом 32 отключает магнитный пускатель с катушкой 23, а он своим контактом 28 отключает электродвигатель 2, Это приводит к тому, что под действием импульсов, поступающих от бесконтактного датчика 3 а первый вход регистра 5 сдвига, записанная в регистр сдвига 1 начинает смещаться вправо. При ее охлаждении в середине регистра 5 сдвиг с его второго выхода выдается сигнал на второй вход первот о триггера 6. Он переключается, на его выходе появляется сигнал, что приводит к появлению сигнала на первом выходе регистра 5 сдпига. Срабатывает реле блока 8 и своим конта;стом 32 включает магнитньш пускатель с катушкой 23. Электродвигатель 2 начинает разгоняться. Таким образом происходит вьфавнивание скоростей вращения электродвигателей. Соответственно выравнивается положение подъем1П1ков 4 и груза 12.
Ана- югично работает устройство при опускании груза вниз. Таким образом в зависимости от соотношения частот HMnyj bcoB, поступающих от датчиков 3 и 4 на входы блока формирования сигнала рассог ласования записанная в ре- 5 сдвига 1 занимает опре-
5
41956
деленное положение в регистре. Это положение характеризует взаимное расположение подъемников 4. Если 1 занимает в регистре сдвига среднее положение, то оба подъемника перемещаются одинаково. Смещение 1 внутри регистра сдвига свидетельствует о неравномерном подъеме груза. В Q этом случае устройство вырабатывает регулирующее воздействие до установления 1 в середине регистра сдвига. Регистр сдвига в данном устройстве играет роль нуль-органа. Таким образом, введение дополнительных элементов позволяет синхронизировать работу электродвигателей с увеличенным быстродействием.
0 Формула изобретения
Электропривод, содержащий два асинхронных короткозамкнутых двигателя, блок управления коммутационны-
5 ми элементами в фазах статорной обмотки, два бесконтактных датчика углового положения роторов электродвигателей, отличающийся тем, что, с целью увеличения быстро,- действия, в него введены реверсивный регистр сдвига с двумя входами и тремя выходами, два RS-триггера, блок согласования, а бесконтактные датчики угловых положений роторов электродвигателей выполнены в дискретном
5 виде и выходами подключены соответственно к двум входам реверсивного регистра сдвига, первый выход реверсивного регистра сдвига соединен с первым входом первого RS-триггвра, второй выход реверсикр.ого регистра сдвига соединен с вторым входом первого RS-триггера и первым входом второго RS-триггера, третий выход реверсивного регистра сдвига соеди ней с вторым входом второго RS-триггера, выходы первого и второго RS- триггеров соединены с входами блока согласования, выход которого связан с входом блока управления коммутационными элементами в ах статор-. ных обмоток электродвигателей.
0
0
5
27
28
У|
29
IIIII /V
фиг2
| Авторское свидетельство СССР № 1154728, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для синхронизации вращения асинхронных электродвигателей | 1977 |
|
SU736331A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
