(54) УСТРЮЙСТВО ДЛЯ СИНХРОНИЗАЦИИ ВРАЩЕНИЯ
1
Изобретение относится к эпектротекнике, а именно к устройствам для взаимнсню регупир(ания числа оборотов двух и более электродвигателей с допопнитепьиым регулированием относительно углового сдвига, и может быть испольасдаано в подъем- S но-транспортных механизмах.
Известно ycTpcrfteTBO для снвхроаизаоии движения нажимных винтов прокатЖЛ кле ти, в котором используются сельсины, следящие за положеки винтов, и элект- Ю ромагнитная муфта, служащая для сочленения одного из сельсине с ведомым винтом Ш. При переходе с совместной работы винтов на раздельную сельсины ведомого винта отключают от механизма и электрически включают его в синхронно-следящую систему с сельсином ведущего винта, а в режиме совместной работы винтов механически сочленяют сельсин ведомого винта с механизмом и электрически переводят сельсин ведомого винта в трансформ режим со спвягсм фазы в линии связи сельсинсш на 9СГ, коАСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
торый осуществляют, например, с помошыо даффаренниального сельсина.
Недостатк(Ж1 устройс-геа является наличие потерь мощности при сигнале, что отражается на быстродействии устройства синхронизашги.
Известен мостчявой грузонодъемный цшн, имеющий две и более механически ве связанные между собой тележки, оборудованные электрическими приводами, состоящими на электродвигателей и уравнителей машин, электрически связанных между собсЛ по систетле электрического вала с системой динамического торможения 2 .
В известном кране имеется большой момент инерции вращающихся деталей нагрузочных устройств двигателей, который во многом компенсируется тем, что тележки, будучи механически не связанными между собой, подвижны. Однако при этом полностью момент инерции не калпенсируется.
Р1звестно устройство для синхронного ращения двух вапов, приводимых асинхроными двигателями, с ггрименением распооженных на тех же валах Двух асинхронных, машин, образутоших эпектршгеюкий вал L3J. Для обеспечения синхронного вращения на обоик валах-укреплены контактные прерыватели, включенные между собой последовательно и под ключ SiHs-гые на вход промежуточного реле, Perte включает контактора, подающего напряжение на статоры машин электргиеского вала, после достткекия синфазности,
QcHOBHbiM недостатком этого известного устройства явпяечхзя малая надежность стобшькости ст-гхронной работы гЕгжводных электродвшателей.
Цель изобретения упроьпение устройства.
Эго достигается тем, что уравнятеяЬ мехаанзм содержит грузовую пгат)5рму и вьшопнен в виде тлтауги, несу- щей жестко установленные на ее концах экранные флажк, н тяговкх винтов, с одной стороны шарнирно связанных со штангой, о другой сторотгы - с гр зовой roiaixfiopMOft, причем тяговые винты . матически связат-гы с электродвигателями, а схема формирования сигнала рассог ласоваккя выполнена Б виде соединенных параллельно бесконтактных коиечшлх вьхк шочатэлеЙ5 йсестко уста ювлент,1х на одних кониах тяговых винтов н подключенных на входы промежуточньпс причем упомян тые экраишле фиажки соединены с npof ajKyTOMHbJMH реле.
В ypaBHS-ггепыюм механизме сшнал рассогласования, поступающий с вала одного иа дикгателей, превращается кз механического в электркческ1-1й. Далае по системе обрать-ой свяан злектрггасгский сигнал рассогласования иреобраауется геромен уточным репе о командный и поступает вновь на приводной даиэгатепь, ликвидируя момент рессогпасоващш числа аго оборотов с другтч- (или с друтИми) приводными двигателями.
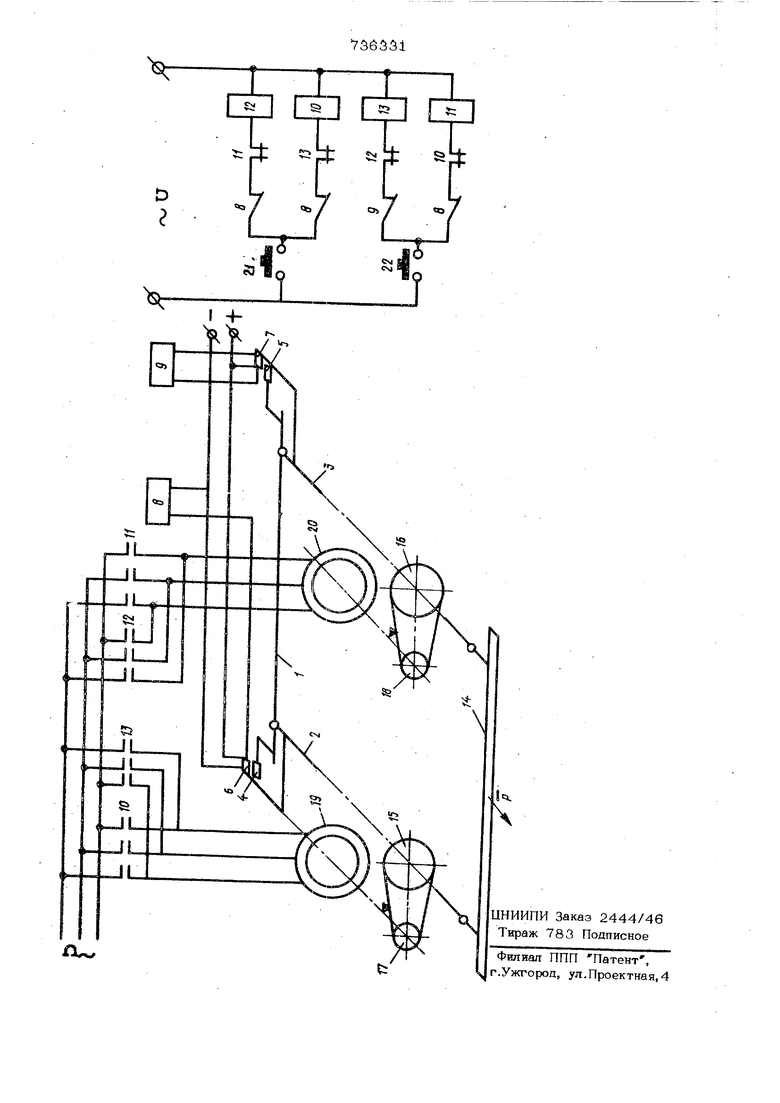
На чертеже приведена функциональная схема устройства.
Устройство для синхронизации вра1ц&нин асинхронно работаюш « электродвр гателей содержит уравнительную штангу 1, шарнирно связанную с верхними концами параллельно установленных тяговык винтов 2 и 3. На обоих концах жестко установлены экранные флажки 4 и 5, изаимодействутошие с элeктpo aгнит- ным полем бесконтактных конечных вык-
лючателей 6 и 7, жестко установленных на верхних кон1шх тяговых винтов. Бесконтактные KOHeHia.ie выключатели 6 и 7 соединены между собой параллельно и подключены соответственно к промежутс чным электромагнитным реле 8 и 9, которые сво1ть.1И контактами управляют магнитными пускателями, 8 управляет магнитными пускателями 10 и 11, Реле 9 управляет магнитными пускателями 12 и 13.
Тяговые БИНТЫ 2 и 3 снизу шарнирно связаны с грузовой платформой 14 и приводятся в возвратно-поступательное движение от вращения установленных на них шкивов 15 и 16, взаимодействующих сво Бнутренией резьбой с резьбой, выполненной на наружной поверхности тяговых винтов. Шкивы 15 и 16 палучают вращение через ременную передачу соответственно от шкивов 17 и 18 приводных электродвигателей 19 и 20,
Устройство работает следующим образом.
Двигатели 19 и 20 в зависимости от выбранного направления движения платформы 14 одновременно запускаются одной из кнопок управления 21 и 22,
При cimxpOHHoE работе обоих приводны электродвигателей 19 и 20 тяговые винты 2 и.З совершают равные равномерные возвратно-поступательные движения,- При этом экранные флажки 4 и 5, закрепленные на концах уравнительной штанги 1, иахо,аятся на одинаковом уровне относительно друг друга и не взаимодействуют с электромагнитными полями обоих бесконтактных конечньрс выключателей 6 и 7
При возникновении момента рассогласования один из тяговых винтов выбегает на некоторую величину ли относительно другого винта.
Например, при выбеге тягового винта 2 вверх экранный флажок 4- начинает
взаимодействовать с электромагнитным полем бесконтактного конечного выключателя 6, в котором ригнал -рассогласования из механического преобразуется в электрический и поступает на обмотку промежуточного реле 8. Это реле 8 отключает магнитный пускатель 10, который своими контактами обесточивает электро-. Двигатель 19, т. е. тот, в котором произошел сдвиг угла поворота вала.
Электродвигатель 20 в это время продолжает работать, а его тяговый винт 3 лвигай1х:я вверх, перемещая отстающий конец уравнительной штанги 1, В момент
выравнивания уравнительной штанги экранный флажок 4 выходит из электромагнитного поля бесконтактного конечного выключателя 6, двигатель 19 включается и оба двигателя снова работают синхронно.
Восстановление синхронизма происходит практически мгновенно. Этому способствует постоянно действующая сила тяжести Р платформы 14 о грузом (или без груза), которая гасит момент инерции вращения обесточенного двигателя 19, воздействуя через резьбу тягового винта 2 и навинченного на него шкива 15 на шкив 17 этого двигателя.
При выбеге тягового винта 2 вниз сигнал рассогл«;ования преобразуется в электрический в бесконтактнсм конечном выключателе 7, откуда он подается на обмотку промежуточного реле 9, которое своими контактами отключает магнитный пускатель 13 и тем самым двигатель 19
При рассогласовании угла оборотов двигателя 2 О процесс восстановления синхронизации аналогичен описанному.
Формула изобретения
Устройство для синхронизации вращени асинхронных электродвигателей, содержапгее уравнительный механизм и формирования сигтсала рассогласования, которая содержит пускатели и промежуточные реле дпя управления пускателями отличающееся г&л, что, с целью упрощения устройства, уравнительный механизм содержит грузовую платформу и выполнен в виде штанги, несущей жестко установленные на ее концах экранные флажки, и тяговых виитов, с одной стороны шарнирно связанны х со штангой, с другой стороны - с грузовой платформой, причем тяговые винты кинематически связаны с электродБКгатвпямн а схема формирования сигнала рассогласования выполнена в виде соединенных параллельно бесконтактных конечных выключателей, жестко установленных на одних концах тяговых винтов и подключенных на входы пром жуточных реле, причем упомянутые экранные флажки соединены с прсмежуточиыми реле.
Источники информации, пртштые во внимание при экспертизе
1.Авторское свидетельство СССР №228116, кп. И 02 Р 5/52, 1964.
2.Авторское свидетельство СССР № 146827, кл. Н 02 Р З/ОО, 1961.
3.Авторское свидетельство СССР № 115310, Н 02 Р 5,52, 1956.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
| Устройство для намотки на катушки нитеобразных материалов | 1975 |
|
SU640779A1 |
| Ограничитель грузоподъемности для кранов | 1972 |
|
SU449874A1 |
| Электропривод | 1987 |
|
SU1494195A1 |
| ИМПУЛЬСНЫЙ СПОСОБ РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ В ЭЛЕКТРИЧЕСКОМ ДИФФЕРЕНЦИАЛЕ ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2585202C2 |
| ВЕТРЯНОЙ ДВИГАТЕЛЬ | 1994 |
|
RU2075634C1 |
| Устройство для непрерывной намотки на катушку нитеобразных материалов | 1974 |
|
SU691225A2 |
| Привод кольцевого радиального распределителя шихты загрузочного устройства доменной печи | 1983 |
|
SU1094864A1 |
| Обегающее устройство для автоматического управления объектом | 1972 |
|
SU548853A1 |
| Подвесная канатная дорога маятникового типа | 1983 |
|
SU1096144A2 |