о
со
05
Изобретение относится к управлению электрическими маш 1нами и может быть использовано для управления шаговыми двигателями, преимущест- венно волновыми.
Цель изобретения состоит в повышении быстроде11ствия и нагрузочной способности.
На фиг.1 приведена функциональ- ная схема устройства на фиг,2 - принципиальная схема блока коррекции; на фиг.3 - диаграмма электромагнитных моментов и напряжений, иллюстрирующие работу устройства на фиг.4 - принципиальная схема управляющего элемента; на фиг.5 - принципиальная схема канала дешифратора
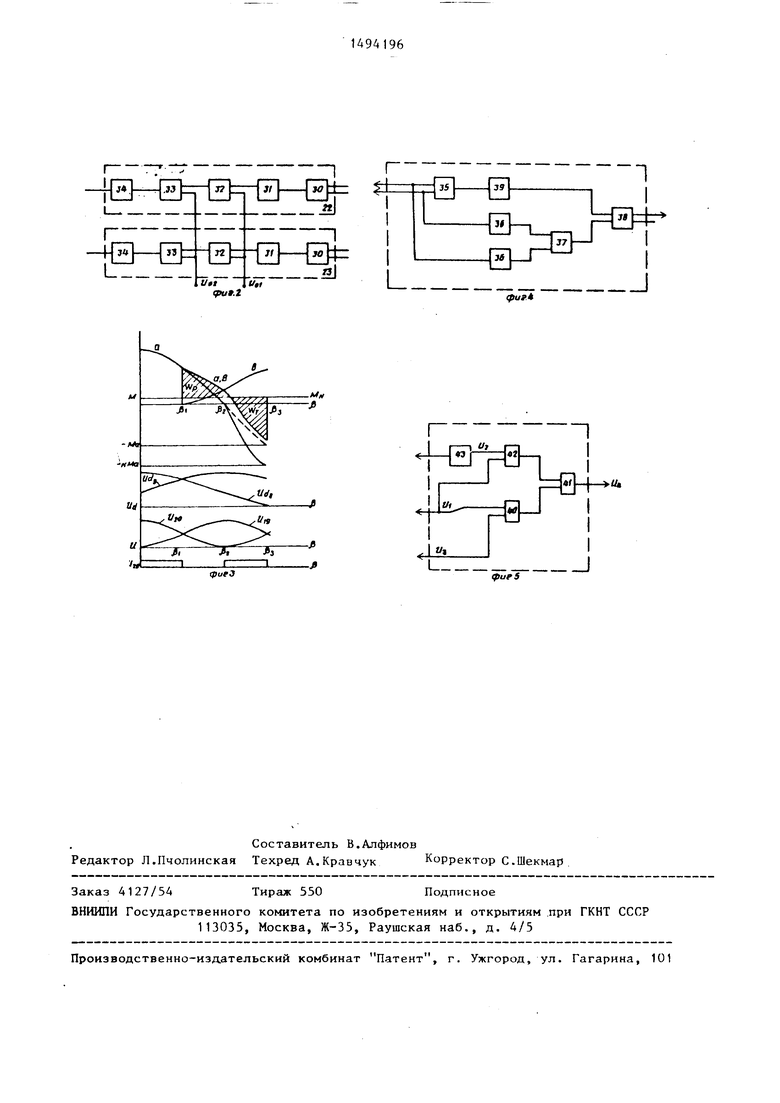
Устройство управления волновым шаговым двигателем (ВШД) с фазными обмотками 1-4, подключенными через разделительные диоды 5 и усилители 6 мощности к источнику 7 питания постоянного тока, включает датчик шагов с каналами 8 и 9 (представляющими собой индукционные датчики положения волны деформации, установленны на корпусе ВШД, причем канал 8 установлен на оси фазы 1, а канал 9 - на оси фазы 2), распределитель 10 им пульсов, регулятор 11 уровня возбуждения, источник 12 питания высокого уровня, подключенный через регулятор 11 уровня возбуждения и два тиристора 13 к точкам соединения фазных об- моток 1-4, объединенных в нечетную 1, 3 и четную 2, 4 группы, с резисторами 14 соответствующих форсирующих цепей и через разделительные диоды - к источнику 7 питания. Управ- ляющие входы тиристоров 13 соединены с соответствующими входами триггера 15 и с выходами соответствующих элементов 16 и 17 фиксации нулевого уровня, входы которых соединены с соответствующими входами управляющего элемента 18 и через дифференцирующие элементы 19 и 20 соединены с выходами каналов 8 и 9 датчика ща- гов. Выходы триггера 15 соед инены с управляющими входами двух ключевых элементов 21, соединяющих выходы каналов 22 и 23 (корректирующая цепь блока 24 коррекции с входами элемента ИЛИ 25, выход которого через третий ключевой элемент 26, управляющий вход которого соединен с выходом управляющего элемента 18, соединен с управляющим входом регулятора 11 уровня возбуждения. Входы каждого канала 22 и 23 блока 24 коррекции соединены с выходами датчиков 27 тока, которые включены между соответствующей фазной обмоткой и точкой соединения анода диода 28 форсирующей цепи с усилителем 6 мощности, управляющий вход которого соединен с выходом одного из каналов 29 дешифратора, первый вход которого соединен с выходами распределителя 10 импульсов, второй вход - с выходом управляющего элемента 18, третий вход - с выходом соответствующего канала блока 24 коррекции.
Блок коррекции (фиг. 2) содержит два канала 22 и 23, каждый из которых состоит из первого сумматора 30, входы которого являются входами канала блока коррекции, а выходы соединены с входом квадратора 31, выходы которого соединены с первым входом умножителя 32, выход которого соединен с первым входом второго сумматора 33, вход которого соединен с выходом элемента 34 извлечения квадратного корня, выход которого является выходом канала 22 или 23 блока 24 коррекции, причем вторые входы умножителя 32 и второго сумматора 33 являются установочными.
Управляющий элемент (фиг. 4) содержит элемент 35 вычитания, входы которого соединены с входами элементов фиксации нулевого уровня 36 и являются входами управляющего элемента, выходы элементов 36 фиксации нулевого уровня соединены с входами логического элемента ИЛИ 37, выход которого соединен с первым входом триггера 38, второй вход которого соединен с выходом элемента 39 фиксации нулевого уровня, вход которого соединен с выходом элемента 35 вычитания, причем выход триггера 38 является выходом управляющего элемента
Канал дешифратора (фиг. 5) содержит элемент И 40, входы которого являются первым и вторым входом ячейки дешифратора, а выход соединен с первым входом логического элемента ИЛИ 41, второй вход элемента ИЛИ соединен с выходом логического элемента И 42, первый вход крторого соединен с выходом порогового элемента 43, вход которого является третьим входом ячейки дешифратора, а второй
3
иход i.Tf f-tein; И ч.- соединен с. нчо- Дим чль ментст И 4(, причем гзпгход элемента ИЛИ 41 ян:1ястся выходом ячейки дсчиифраторл.
стрс ис.тво работает следующлм 1)( ра:ном.
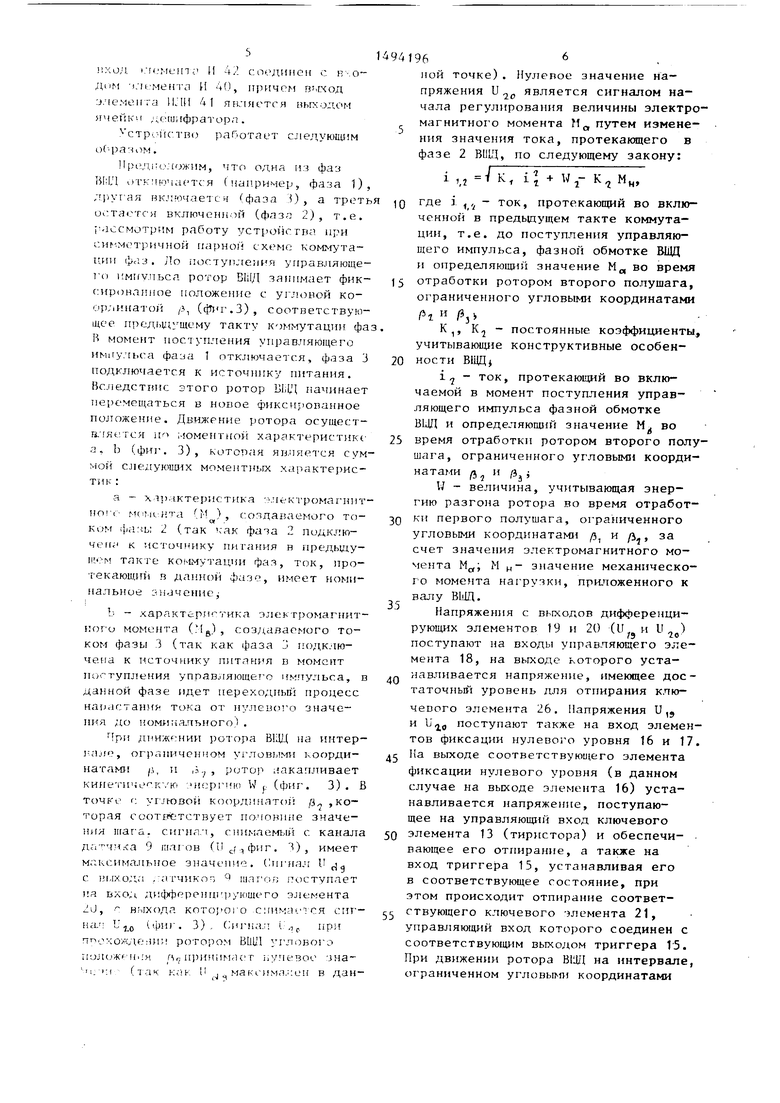
Ире-. тпс Ложим, что одна из фаз BIiL l 1)( тс:я (naiipviMep, фаза 1), ;г1)уг ая вкл очае1сч (фаза О, а треть ог.тас тгя включенной (фазл 2), т.е. рассмотрим работу устр(йства при сл1Ь .мотричной парной схеме коммутации . По постугигсния управляюще- I o имку.пьса ротор В1;1Д занимает фик- г;ир) положение с угловор ко- ор;|Ииато { ,з, (дЛт.З), соответствующее предьщущему такту К Я- гутации фа В момент поступления управляющего HMity; i)ca фаиа 1 отключается, фаза 3 подключается к источ1и1ку питания. Вследстнис этого ротор В1;Щ начинает перемещаться в новое фиксированное положение. Дв.ижрние ротора осущест- B. Kt;TCH ;-юмент1 ой характеристике а, 1) (фи1 . 3), которая является суммой следукшшх моментпых характеристик :
а - X 11)актеристика электромагнпт ногг- M(if.ii-i-n-a (Г 1 ) , создаваемого то- ком |}|а,чь: 2 (так К ак фаза 2 подключена к источнику питания в предыду- игом такте коммутации фаз, ток, про- текающ гй в дапнсзй фазе, имеет номи- .нальпое значение
Ь - характеристика электромагнит- :г)Г о момента (Mg) , создаваемого током фазы 3 (так как фаза 3 подк.аю- чена к источнику питания в момент пг;гтуш1ения управляющет о импульса, в данной фазе идет переходный процесс на ;астания тока от нулевого значения до номя11,гттъного,) .
{ри дI ИЖf;нии ротора В1ЦЦ на интер- , ограниченном угловыми коорди- натам |i, и i.i. , POTOJ накапливает кине 1 ическ-/ю : нергию W j,. (фиг. 3), В точке г; уг .гговой коорди.чато) fl , которая соответствует половине значения шаг а, сигяа/т, с1П1маем1лй с канала да- -чи.а 9 шагов (., фиг. О, имеет максимальное значепие. Сигнал 1 d g с выхоДс . атчикт Ч шаг ог; гтоступает на Влод дифференш рУ чшего элемента 2J, нмхода KOToj oro снимается спг 10
((риг. 3) , Сигнал
при
ппохожде;1ии ротором BUI/l уг лового ll JЯu ж } ;я npuHiiMcU T нупевоо зпа M.-i:i (так il j макоимл.геи в дан 94196
ной точке). Нулевое значение напряжения и 20 является сигналом начала регулирования величины электромагнитного момента Мд путем изменения значения тока, протекающего в фазе 2 ВИЩ, по следующему закону:
i ,,j VK,
н
где ,j ток, протекающий во включенной в предьдущем такте коммутации, т.е. до поступления управляющего импульса, фазной обмотке ВЩЦ и определяющий значение Мд во время
отработки ротором второго полушага, ограниченного угловыми координатами
Рг и з
К,, К - постоянные коэффициенты,
учитывающие конструктивные особенности ВЩЦ
i - ток, протекающий во включаемой в момент поступления управляющего импульса фазной обмотке вид и определяющий значение М во
время отработки ротором второго полушага, ограниченного угловыми координатами ,j и j
W - величина, учитывающая энергию разгона ротора во время отработки первого полушага, ограниченного угловыми координатами , и /5, за счет значения электромагнитного момента М„; М м значение механического момента нагрузки, приложенного к валу ВЦД.
Напряжения с выходов дифференцирующих элементов 19 и 20 (Ц U д) поступают на входы управляющего элемента 18, на выходе которого устанавливается напряжение, имеющее достаточный уровень для отпирания ключевого элемента 26. Напряжения U,, и поступают также на вход элементов фиксации нулевого уровня 16 и 17.
На выходе соответствующего элемента фиксации нулевого уровня (в данном случае на выходе элемента 16) устанавливается напряжение, поступающее на управляющий вход ключевого
элемента 13 (тиристора) и обеспечивающее его отпирание, а также на вход триггера 15, устанавливая его в соответствующее состояние, при этом происходит отпирание соответствующего ключевого элемента 21,
управляющий вход которого соединен с соответствующим выходом триггера 15. При движении ротора В1ЦД на интервале, ограниченном угловыми координатами
1., j , на вход блока 24 коррекции, а именно на вход соответствующего суммирующего элемента 30 поступает сигнал, снимаемый с выхода датчика 27 тока, установленного последовательно с фазой 3 ВШД (в данной фазе продолжается переходный процесс нарастания тока, а следовательно, и электромагнитного момента Mg). С выхода суммирующего элемента 30 сигнал, пропорциональньв току, протекающему в фазе 3 ВШД, поступает на вход квадратора 31, где производит- ся операция Возведение в квадрат, после чего сигнал поступает на первый вход умножителя 32, где производится операция Умножение, причем на второй вход умножителя 32 поступает напряжение уставки Uou пропорциональное коэффициенту К,. Далее сигнал поступает на первый вход сумматора 33, на второй вход которого поступает напряжение уставки UQ,, пропорциональное величине (). Сигнал, снимаемый с выхода сумматора 33, поступает на вход элемента 34 извлечения корня, где производится операция Извлечение квадратного корня. Таким образом корректирующая цепь 32 блока коррекции 24 формирует на выходе элемента 34 сигнал уставки, пропорциональный требуемой при данном угловом положении ротора величине тока, протекающего в фазе ВЦЦ. Использование сумматора 30 позволяет сократить количество корректирующих цепей за счет того, что фазы 1 и 3, а также 2 и 4 ВШД не могут быть включены ни в одном такте коммутаци одновременно. Выходы датчиков тока указанных фаз выведены на корректирующую цепь при использовании сумматора 30. Сигнал, снимаемьй с выхода корректирующей цепи (с выхода элемента 34), поступает через
открытый ключевой элемент 21 на вхо логического элемента ШБ1 25, с выхода которого сигнал поступает через открытый ключевой элемент 26 на уп- равляющий вход регулятора 11 уровня возбуждения. Регулятор 11 уровня вобуждения в зависимости от сигнала установки, сформированного блоком коррекции 24, увеличивает потенциал в точке соединения фазы 2 ВШД с источником питания через соответствующий открьгп.ц) тиристор 13. Вслед
5
0
5
0
5
0
5
ствие этого увеличивается ток, протекающий в фазе 2 ВЦЧ, и электромагнитный момент 11. На фиг.З пунктирной линией показана моментная характеристика М при отсутствии регулирования, сплошной линией - изменение момента М при осуществлении регулирования величины тока, протекающего в фазной обмотке ВШД. При этом соблюдается условие равенства кинетических энергий W р и W. В момент прихода ротора ВШД в новое фиксированное положение с угловой координатой PJ , сигналы, снимаемые с выходов дифференцирующих элемен - тов 19 и 20 (и j и Ujjj) принимают равные значения, поступают на входы управляющего элемента 18 и устанавливают на его вьйсоде напряжение нулевого уровня, что вызывает запирание ключевого элемента 26. Таким образом, управляющий вход регулятора 11 уровня возбуждения оказьгаается отключенным от выхода блока 24 коррекции, это приводит к уменьшению потенциала, создаваемого на аноде тиристора 13, а следовательно, к его запиранию. На фазе 2 ВШД устанавливается значение напряжения источника питания, а по форсирующей цепи ток данной фазы снижается до номинального значения. При этом фазная обмотка 2 отключается от источника питания путем кратковременного запирания ключевого элемента 26, так как формирование на выходе управляющего элемента 18 напряжения нулевого уровня приводит к появлению на выходе канала дешифратора 29 нулевого уровня, которое он сохраняет до тех пор, пока ток в фазе ВШД не достигнет номинального значения. В таблице приведены состояния выхода канала дешифратора, причем напряжение иJ,снимаемое на выходе порогового элемента 43, имеет единичный уровень при фазном токе ниже номинального уровня.
и,
О
о о о 1 1 1 1
и
о о 1 1 о о 1 1
и
о 1
о 1 о 1 о 1
и,
о о о о 1 1 о 1
Во включенной в данном такте коммутации фазе 3 заканчивается переходный процесс нарастания тока до номинального значения, таким образом ротор ВШД фиксируется в новом фиксированном положении (в данном случае /3, фиг. 3).
При поступлении следующего управляющего импульса работа устройства повторяется, за исключением того, что сигнал уставки,пропорциональной треб уемому значению тока, формирует корректирующая цепь 22, вход которой соединен с выходами датчиков 27 тока, установленных послеловательно с фазами 1 и 3 ВШД.
Такое выполнение устройства позволяет осуществлять перевод ротора ВШД в новое фиксировянное положение с нулевым значением скорости перемещения, достигая при этом гювьшение нагрузочной способности за счет рационального регулирования значения Электромагнитного момента, создаьас- мого током фазы, включенной в предыдущем такте коммутации.
Кроме того, повышается быстродействия, так как отладает необходимост обеспечения форсированного нарастания тока в момент прихода ротора в точку нового фиксированного положения. Ток, протекающий во включенной в момент поступления управляющего импульса фазе В11Щ за время отработ- ки ротором шага перемещения, принимает номинальное значение без применения каких-либо дoпoлнитeJтьныx средств, тогда как ток, протекающий в фазе ВШД, включенной в предыдущем такте коммутации фаз, снижает свое значение до номинального за счет использования форсирующей цепи практически мгновенно.
Формула изобретения
Устройство стартстонного управления четырехфазным шаговым двигателем, содержащее источник постоянного тока,50 соединенный с усилителями моишости по числу фаз, датчик шагов, распределитель импульсов и регулятор уров.Q с
.,,, 25
0
5
0
ня возбуждения, от пи чающее- с я тем, что, с целью повышения быстродействия и нагрузочной способности, в него введены триггер, два дифференцирующих элемента, два тиристора, два элемента фиксации нулевого уровня, четыре датчика тока, логический элемент КПИ, три ключевых элемента, чётырехканальный дешифратор, управляющий элемент, блок коррекции, Бключаюшз1й в себя два канала, четыре форсируняцие цепи, каждая из которых состоит из последовательно соединен- ньЕХ диода и резистора, а также источник питания высокого уровня, подключенный через регулятор уровня возбуждения к анодам двух тиристоров, катод каждого из которых соединен с резисторами двух форсирующих цепей и через разделительный диод - с источником постоянного тока, управляющие входы первого и второго тиристоров соединены с соответствующими входами триггера и с выходами элементов фикса1и1и нулевого уровня, входы которых соединены с соответствующими входами управляющего элемента и через дифференцирующие элементы соединены с выходами датч1 Ка шагов, выполненного двухканальным, рыходы три1- гера соединены с управляющими входами двух ключевых элементов, соединяю- выходы каналов блока коррекции с входами элемента Ш1И, выход которого соединен с управляющим входом регулятора уровня возбуждения через третий ключевой элемент, управлякг- щий вход коюрого соединен с выходом управляющех о элемента, входы каждого канала блока коррекции соединены с выходами датчиков тока со- ответствуюга-ix фазных обмоток двигателя, причем каждый датчик тока подключен к точке соединения анода диода форсирующей цепи с усилителем мощности, при этом управляющий вход усилителя мощности соединен с соответствующим выходом дешифратора, первые входы каждого канала которого соединены с выходами распределителя импульсов, вторые входы - с выходом управляющего элемента, а третьи входы - с выходами датчиков тока.
г2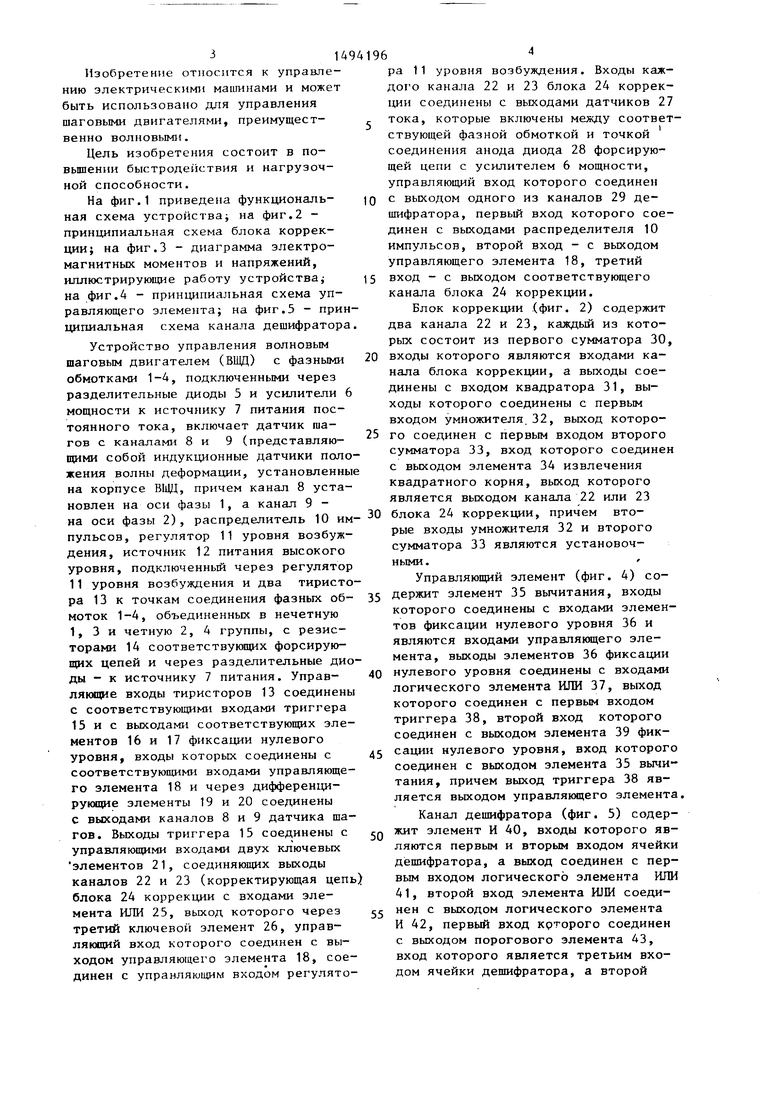


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2722689C1 |
| Способ управления асинхронным электродвигателем с фазным ротором и устройство для его осуществления | 1989 |
|
SU1683165A1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1541754A1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| Шаговый электродвигатель со стартстопным управлением | 1990 |
|
SU1814187A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1403331A1 |
| Устройство для управления волновым шаговым двигателем | 1989 |
|
SU1700739A1 |
| Коммутатор для управления шаговым двигателем | 1990 |
|
SU1784944A1 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
Изобретение относится к электротехнике ,в частности, к электроприводам, и может быть использовано для управления шаговыми двигателями. Цель изобретения - повышение быстродействия и нагрузочной способности. Устройство содержит датчики тока 27 в цепях фазных обмоток 1 - 4 шагового двигателя, источник 12 питания высокого уровня с регулятором 11 уровня возбуждения, подключенный к обмоткам 1 - 4 через тиристоры 13, и источник 7 постоянного напряжения, подключенный к обмоткам 1 - 4 через диоды 5. Устройство обеспечивает стратстопное управление при нефорсированном включении и форсированное снижение тока в отключаемой обмотке. При этом вычисляется и устанавливается оптимальное при данной нагрузке значение тока при торможении. 5 ил., 1 табл.
фиеЭ
1
| Дискретньв электропривод с шаговыми двигателями/Под ред | |||
| М.А.Чи- ликина | |||
| - М.: Энергия, 1971, с | |||
| Раздвижной паровозный золотник с подвижными по его скалке поршнями между упорными шайбами | 1922 |
|
SU148A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
