/г./
Изобретение относится к управлению электрическими машинами и может быть ис- йЬльэЬвано для управления шаговыми двигателями, преимущественно волновыми, .«.
Цель изобретения -упрощение устройства и повышение .его надежности. .
На, ф#г. 1 приведена функциональная схема предлагаемогоустройства; на фиг,Д..
. . принципиальная с Хема управляющего $лемента; на фиг. 3 - принципиальная схема дешифратора; наi фиг. 4.- принципиальная схема олока коррекций:; на фиг, 5 - дйаграм;;ма напряжений оков
работу ;|ус р диаграмма Электрс- г)нитйЬ1(х моментов, ; иЛлюЈгриру:; ющая работу yet ройства. - ЙЩ -- ; : .-;...s Т Устройство(фи г. 1) содёрЖйтфазь двй-;
. гзтеля 1.ЗЙл распределитель импульсов Ъ,; м;нойз н л нь1Й уср14т.ель мощности б,
У йс Ьчник; г аЛГця зысокоро уровня,; разде те ьн Иоды; 8i дбухканальйый датчик
С адагорЭ Ходй (;Ьедй
; |ётётв у-кЩ
;; мен-га-iOV д;атш и о коррекции f 2;v ) v13и фЬрсирукхщие Щёгги,
)кдая s crrolpbix:- c jqc b JT;ii :rioc flo6a-/
T«flfeiHiQi ео( 14 и рвзйртора
S,,
; с
:дьг.;- ,; ё.еН.
: К;(ЗДгД
ход :прёо р/ 6|а;гел .-;
Первый :вхо дёйпфратора 1$ срёдий1эн ;р вйХр о :1г|нёратор иипульсо1в 1S, Третий и
(1й. Дешифратора 13 ссфДине-;: И1ы 6 nepBbJjifvii (5Дами блбка крр liиVeobTB CT-By Qi yrifpa i)
.У o&litMp, и /восьмой входа де1ш1й{| ратора 13
; ;соей41нек с србтвётствуйЩймй вьгхрйами ра рёдёпйтёля импульсов 5, Йыходы ке- шифратрра 12i . с упрШяйщйми
18)C0 9Mlrt М рГОКЙЙЭЛЬЯОГ О :УСИЛИТёЛЯ МОЩ -HOfeTH 6 со:единя рщегр фадц 1, 2, 3, 4 дви гатёлй мёрёз рйздёлйтё л ныеi ;диоды-8 с
(эчникрм итанйя fыЬокого уровня 7. Фа.., зы ,2, 3, 4 дёйга еля шунтйрованы форсирующими делями и объединены в две
группы неодновременно включаемых фаз, в
каждую из которых вклйчей ерответствуюущии датчик Тока 11. Выход датчиков тока 11
соединены с третьим и четвёртым входами
блока коррекции 12,
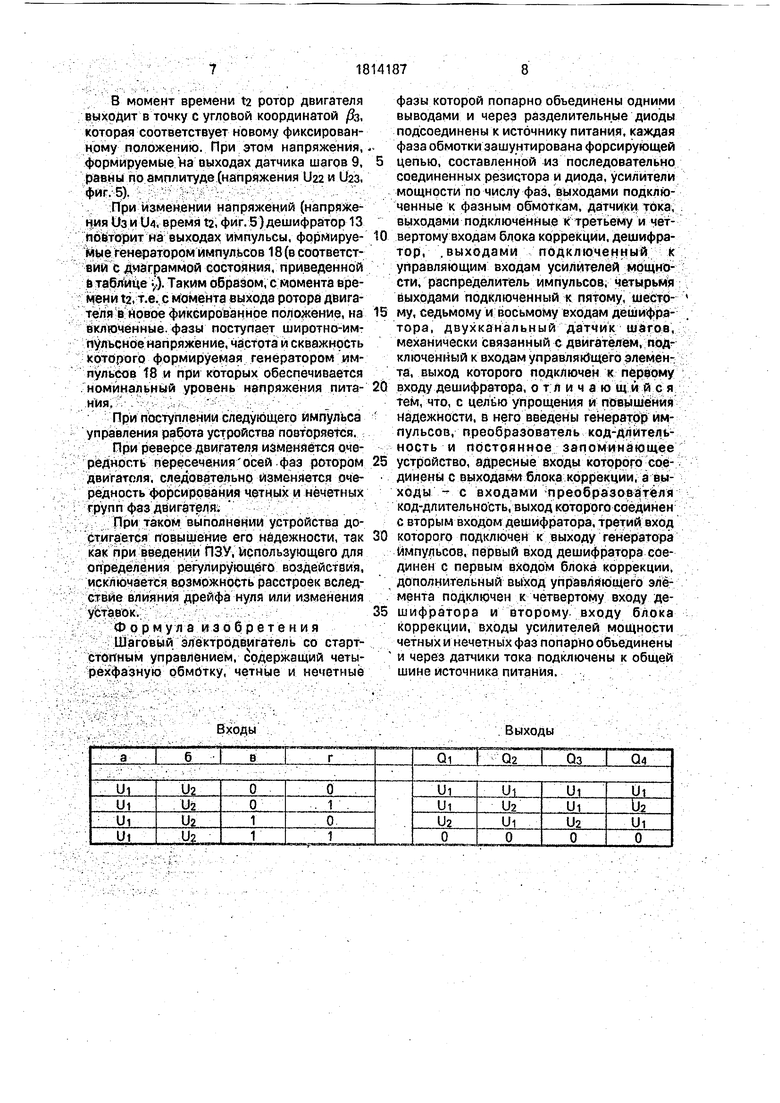
Управляющий элемент (фиг, 2) содержит элементы фиксации нулевого уровня 20,21, входыу крторых являются входами управля- ; рщёгр элемента и объединены с входами выпрямителей 22, 23. Выходы элементов фиксаций нулевого уровня 20,21 соединены
с входами элемента ИЛИ 24 и с соответствующими входами R-S триггера 25 Выходы R-S триггера 25, соединены с первыми входами
элементов И 26, 27, вторые входы которых
соединены с выходом) R-S .триггера 28. Вход S триггера 28 соединен с выходом элемента ИЛИ 24, а вход R триггера 28 соединен с выходом компаратора 29. Входы компаратора 29 соёдийёны с выходами выпрямителей 22 и 23. Выходы элементов И 26, 27 являются выхЬДами управляющего элемента. ;}.; .. с: : V;:v;: i-r /; :;:-- . .-
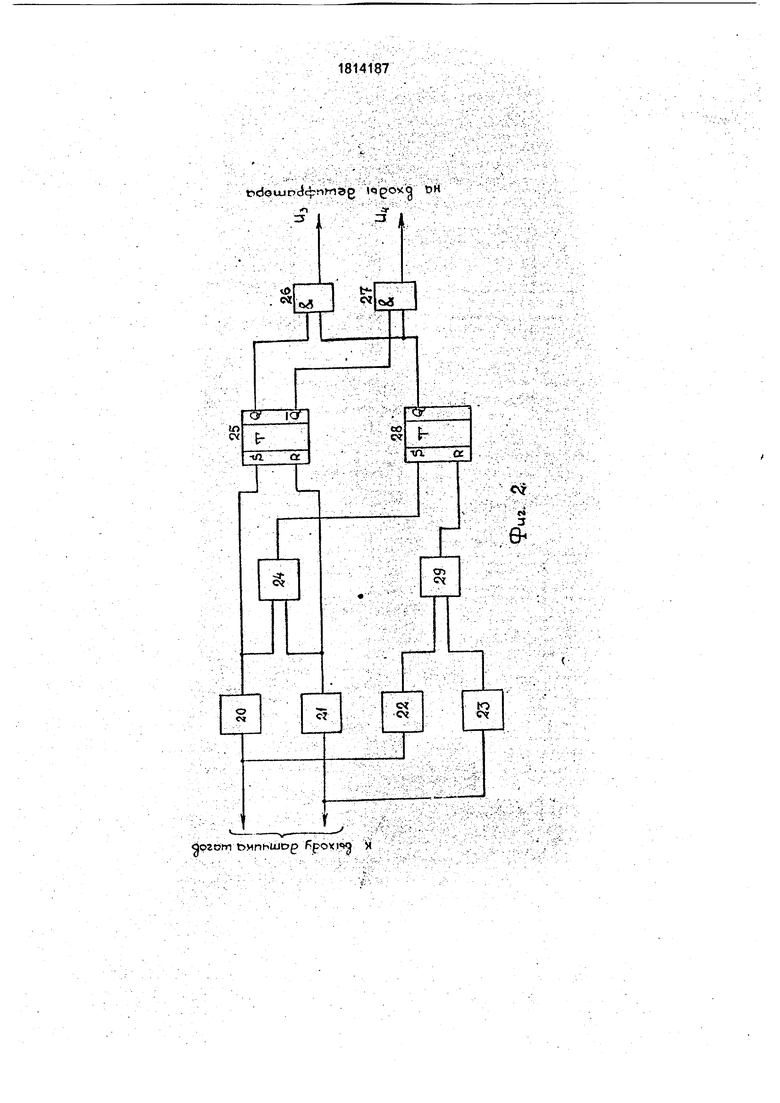
. Дешифратор (фиг. 3) сбдержит Два йн- вейтйрующйх элемента 30,31, выходы кбтО рых явЛякЬтся третьим и четвёртым входами дешифратора и соединены с вторыми входами элементов И 32, 33. Выходы инвертирующих Элементов 30, 31 сИзезйнеЦъ с вторыШи входами элементрв 1/11:34 В5,;атак-х
же с третьими входами элемен а И 32. 33. ервые входы элёмёнт э 14 34, 35 рбъёДйнег ны и являютея первым в одом щифратб1 , ра. Первые ехрды элементов} И; 32; 33
объединены и ЯВ ЙКУТСЯ йходом;Деш ифратора. В ыходы элементов;-;ф; 34; 3 соединение8х;рд| й эл1емё Й; которого ссзединён - перешли в Ьдамй
flep;Bjpro и tpeTberp 3 ei«etftpia; чу вла4ёййя: 19. Выходы $дёйёмтовi И :32{ 35 сбёДЙйёнй с входами :Элемен
соединён с; первыми входами1 Bropotp wi чет ҐёртогЬ э/1ё1 йт-6в срвпадейй я 19.% Втбрйе jxPflbi элементов;совпадён 19} ё; й 4ёны :
с;c6otse cfвукзщимивыходами cri ejcie/ivt- : теля имНульсов 5 и является пятый,/шее-: . jtiM, седьмым и врбьмЫн входами дешифратора 13, Вь1ХрДы элёмё.Н1Ровсо на- ;
дения 19 соединены с управлякэщймй вхо- дам и соответствующих усилителей
мощности б и являются выходами дещйфратора 13/ ; A4;: ::v;v ;- ..-;:y:. .:
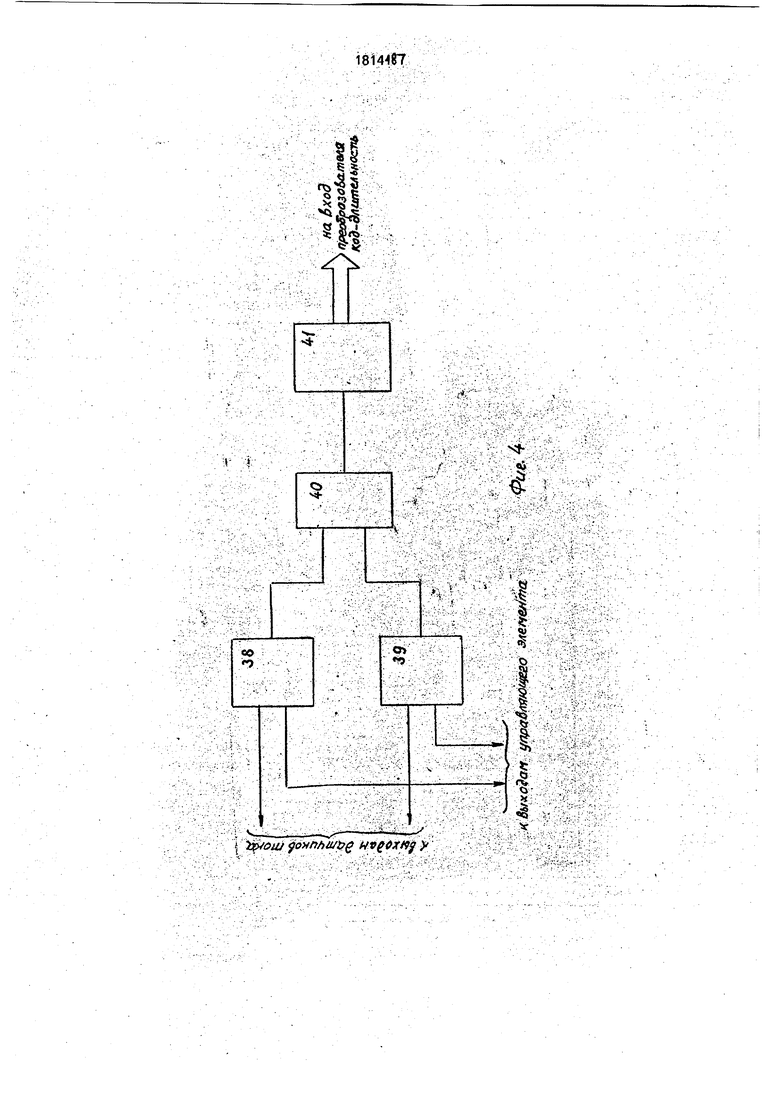
рлрк коррекции (фиг. 4) родёржйт два умножителя 38, 39 Первые ходыумнбжИ гелей 38,39 являются первым и вторым вхо-,,
дами блбка коррекций и соотвётствё;нно соединены с выходами управляюЩёгб элемента. Вторые входы умножителей 38,, 39 . являются третьим и четвёртым вхбдами блока коррекции и соединены с выходами соответствующих датчиков тока. Выходы умножителей; 38; 39 соединены с входами сумматора 40,; выход которого соединён с входом аналого-цифрового преобразователя (АЦП) 41. Выход АЦП 4t является выходом блока коррекций и соединен с входом
преобразователя код-длительность
Устройство работает следующим обра;зом. ;. . ; .-;.: -.. .: ,-.-
Рассмотрим работу устройства при сим- метричной парной системе коммутации фаз. .
.. 5 - - : -.1814187.;,.;..;.v- ...v:v .6 //;V.:. -; ---:/ --;
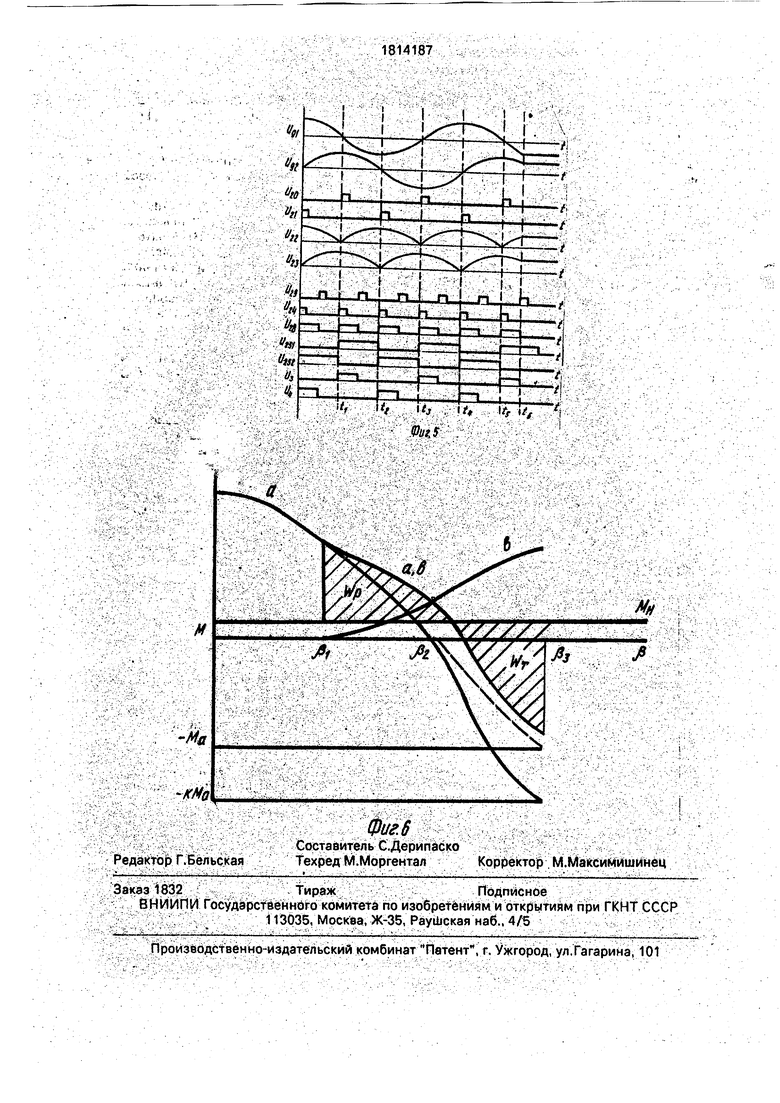
До поступления управляющего импульса ра 25 и через элемент ИЛИ 24 на установоч- ротор двигателя занимает фиксированное ный вход R-Sfpurrepa 28, На фиг. 5 приве- положение с угловой координатой (фиг. дены диаграммы (г|рй кенг1й: Uie - 6), соответствующее предыдущему такту - напрйхсемие, формируемоена прймом-ейхо- коммутации фаз. К источнику питания ebipo- 5 де R-$ триггера 8; кого уровня 7 подключены фазы 1 и 2 двйга- : мируетйр Щ теля. На включенные фазы noctyna f 2S;
импульсное напряжение питания, частота и г .версиом выходе iR-$ триггера .Указанные скважность которого формируются гёнёра- йапр)женйя ftoctynaiot на; входы элементов тором импульсов 18. Скважность импулЬСоВ 10 И 26,27, На выходе ксУгбрых, а следователь- напряжёния подобра на таким образом; чтр но, и Н& выходеупрайя:я«)1цего элемента 10 бы на включенных фазах Двигателя рбеспе- (фиг. 1) формируются сигналы Ui и (фиг чивался нормальный уровень тока В 5/ омент
момент поступления управляющего импуль- j Напряжения и itj, формируемые на са фаза 1 отключается, а фаза 3 подключа- 15 выходах;управляющего элё та10лпрст ется к источнику питания 7. Ротор двигателя natpT wai входы блока коррекции 12; на вы- начинает перемещаться в новое фикси о- . ходе. kotbpJErfo :фррмИ:руётс:я ; код, ванное положение. Перемещение ротора; являющийся функцией рсуществляется по моментной характериг тока II, (прст йющйй н адресные входы бтйкеа, в (фиг. 6) которая является суммой 20 прстоянногЬ запоминающего устройства следующих моментных характеристик; а - 16, iia выходе 1фторогофорй характеристика электромагнитногр мрмен- закон изменения которого ;B«paxaetcf з;а- та. создаваемого током фазы 2 (ток, прите- висимоеть 6 у ;;;;/;:- ;; ; /:; л кающий в данной фазе, имеет номинальное
значение); в - характеристика электромаг- 25 1 VKt 12 -Н А , V ; НИТНРГОмомента.срздаваемРгЬтакомфаэы:....;- :.- :. .:-: :;;v r-:: ;; З -й; : - 3 (в Данной фазе осуществляется переход- где ij - тон вкЛючбйн0й фазы, ; ных процесс нарастания тока от нулевого Kj прстоянныйi коэффициент,учитыва значения до мийимального). : ;ющий конструктивные особенности шагово- . При движении ротора двигателя на ий Щ го Двигателя; : ;;: V . /. : v Г; 1;б., Ргранйч энном-угУ1бв ыми-кРо рдйй.а-; ;;;:. А - постоянная величина, учитывающая тами $ и/fe, ротор накапливает количество запасенной ротором кинетиче- кинетическую энергию W (фиг. 6). В точке cv скойi энергий во время предыдущего разго- угловой координатой fa, соответствующей на и значение eXjaHM i€(«orp; 1иомё)Ит половине шага, ротор двигателя пересекает 35 нагрузки, приложенного к валу двигателя, ось фазы 2.Электромагнйтный моментфазы Импульсы с выхода ПЗУ 16 прх;тупают 2 изменяет знак на противоположный. G на вход преобразователя код-длительность этого момента электромагнитный момент . вход де- фазы 2 способствует торможению ротора ;; щифратЬра 13. ч V;; J;;;;;;;;: ; :.;;-: v;;U: двигателя, тогда как элёктромагнитньгймр- 40 -.с :.. ;;/ :.;..::::;;,;.;:;;-. ;;;;; ; ;-: :- -.,;;/;; ; мент фазы 3 способствует дальнейшему его 1 ; разгону. ; ч : на трет
При пересечении ротором двигателя ; по$ту па ют напряжения Us и U4, формируе- оси фазы 2 (т.е. точки с угловой координатой йенабЬ1Х Ьдахуп рав я1Рщ pi, фиг. 6) напряжение, формируемое; на вы- 45 дешифратора 13 на первых входах:его эле- ; ходе первого канала датчика шагов 9, при-;; ментов.совпайения 19 повторяются сигка нимает нулевое значение. На фиг. 5 л«, приведем
приведены диаграммы напряжений 1)91 vi:; Ј выходов дешифратора 13 riocTynaipt на U92, которые формируются на выходе пёрв6и Управляющие входм
го и второго каналов датчика шагов 9 сорт- 50 зависимости Рт текущегоf со|с:г6янйя наi вы-: ветственно. Напряжения на выходах ходах 5. В мо- ; датчика шагов изменяются по Синусоидаль- мент времениi ti (на ;фазу 3 Двигателя ному закону (так как по синусоидальному С поступают;HMnyflbCb|V PpMM yeMbie генера- ,закону изменяется вблна деформации гиб- тором импульсов 18. На Фазу 2 двигателя кого ротора) и имеют соответствующий 55 поступают импульсы, формируемые преоб- сдвиг начальной фазы.. разователём кдд-длйтёльй6стьТ7. Ротор
В момент времени ti на выходе элемён- : двигателя сйвёрхцаёт движение на втбрРм та фиксации нулевого уровня 20 (фиг. 2)фор- .ЙЬлушагё, Рграниченнрм углойымй мируется импульс напряжения Uao, который натами/3i и Дг (фиг. 6).. поступает на установочный вход R-S тригге- у J
В момент времени t2 ротор двигателя ыходит в точку с угловой координатой /Зз, которая соответствует новому фиксированному положению. При этом напряжения, - ормируемые Vm выходах датчика шагов 9, равны по амплитуде (напряжения U22 и IJ23. фиг. 5). ; :У 1 : -: /-:- - /: : ,.- : - . .- ;:-::. . При изменении напряжений (напряже- гуля Ш иЩ время t2, фиг. 5} дешифратор 13 повторит на выходах импульсы, формируемые генератором ймпул 18-(в соответствий с маграммой состояния, приведенной бтарл игЦе 0. Таким образом, с момента времени t2, т.е. с Момента выхода ротора двига- т я-В:йовре фиксированное положение, на включенные, фазы поступает широтно-им- пульснбе напряжение, частота и скважность которого формируемая генератором им- пульбов f8 и при которых обеспечивается номинальный уровень напряжения ПИТа- НИЯ, -nv-:. ;-.../ , . .
При поступлении следующего импульса управления работа устройства повторяется.
При реверсе двигателя изменяется очередность пересечения осей фаз ротором двигателя, следовательно изменяется очередность форсирования четных и нечетных групп фаз двигателя
При таком выполнении устройства до- ига;ется повыицение его надежности, так как при введении ПЗУ, Использующего для определения регулирующего воздействия, исключается возможность расстроек вследствие влияния дрейфа нуля или изменения ;у ет ;вЬк Г С- -V;;-. . :; ::-. ;-;.
Ф о рi м уя ai из о 0ре т е н и я
; Шаговый электродбигатель со старт- стрпным управлением, содержащий четы- рёхфазную обмотку, четные и нечетные
фазы которой попарно объединены одними выводами и через разделительные диоды подсоединены к источнику питания, каждая фаза обмотки зашунтирована форсирующей
цепью, составленной из последовательно соединенных резистора и диода, усилители мощности по числу фаз, выходами подключенные к фазным обмоткам, датчики тока; выходами подключенные к третьему и четвертому входам блока коррекции, дешифратор, . выходами пЬдключен.ный (с управляющим входам усилителей мЬщно- сти, распределитель импульсов, четырьмя : выходами подключенный к пятому, щестому, седьмому и восьмому входам дешифратора, двухканальный датчик , механически связанный с двигателем, подключенный к входам управляющего элемента, выход которого подключен к первому
входу дешифратора, о т л и ч а ю щ и и ся тем, что, с целью упрощения и повышения
надежносш, в него введены генератор импульсов, преобразователь код-длительность и постоянное запоминакзщее
устройство, адресные входы которого соединены с выходами блока коррекции, а выход ы с входами ;преобразователя код-длительность, выход которого соединен с вторым входом дешифратора, третий вход которого подключен к выходу генератора импульсов, первый вход дешифратора соединен с первым входом блока коррекции, дополнительный выход управляющего элё- мента подключен к четвертому входу де- шифратора и второму входу блока коррекции, входы усилителей мощности четных и нечетных фаз попарно объединены и через датчики тока подключены к общей шине источника питания. ..
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод для разметки шкал | 1984 |
|
SU1228071A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Устройство для управления ведущим шаговым двигателем | 1981 |
|
SU999022A1 |
| УСТРОЙСТВО ИНДУКЦИОННОГО НАГРЕВА ПЛОСКИХ МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 1992 |
|
RU2076466C1 |
| Устройство стартстопного управления четырехфазным шаговым двигателем | 1987 |
|
SU1494196A1 |
| Многоканальное устройство контроля температурных режимов инкубаторов | 1983 |
|
SU1157528A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1985 |
|
SU1226091A1 |
| Устройство для динамической балансировки роторов лучом лазера | 1988 |
|
SU1515086A2 |

Входы
Выходы
Ьф.ш.п;&Ј«м ;ё
оргот ьмпКшор Ppoxi M
k бьмоЭам пробля Элемента
I
u
НО ул/эайляюи ие си/ ителеи
; ..... J4Oui«pcjfjH. : v- .- ;: .: ;
iSlfrlSt
К былоЭух &«p3iif
npec SJ3ajo8aimeЛягекератюро
Wd- Ъмтельносгпьцм/7у/)ьсов
51
$
A
/
)( uvgoxNfy
