Изобретение относится к автоматизации производственных процессов, в частности к устройствам для управления загрузкой емкостей сыпучими материалами, и является усовершенствованием устройства по основному авт.св. № 1066924.
Цель изобретения - повышение надежности и удобства эксплуатации.
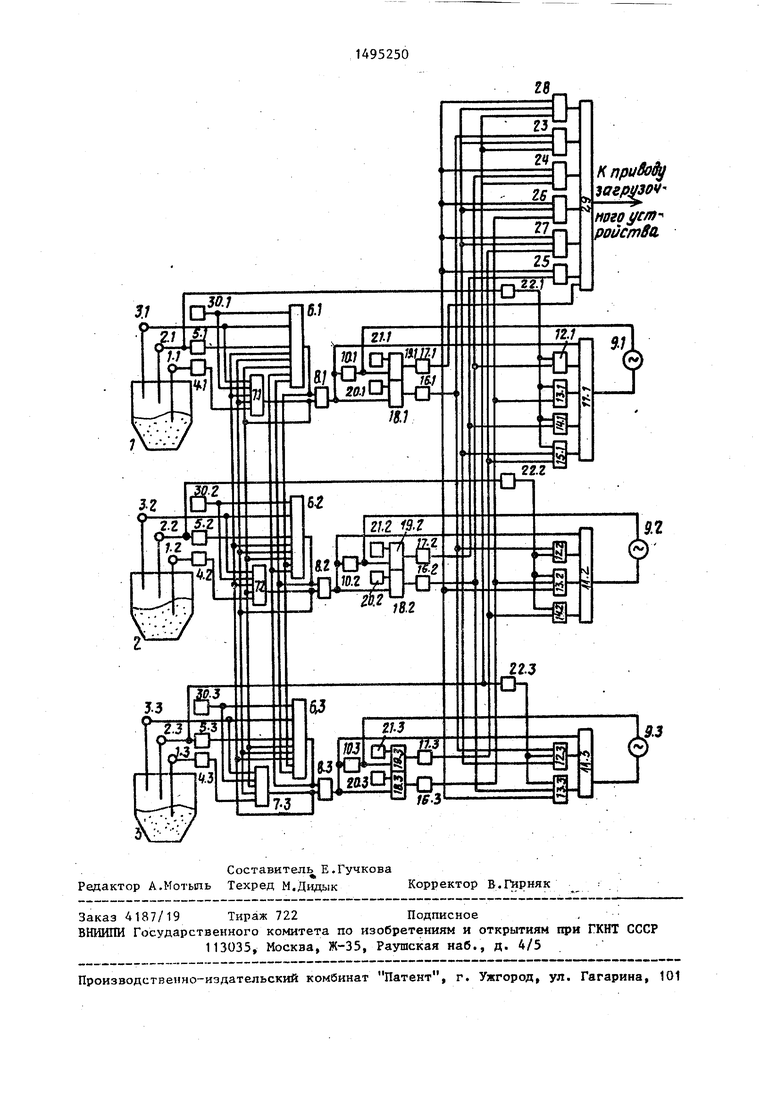
На чертеже представлена функциональная схема устройства для автоматического управления загрузкой емкостей.
Устройство для автоматического управления загрузкой емкостей сыпучим материалом содержит емкости 1-3, датчики 1.1-1.3 нижнего, 2.1-2.3 рабочего и 3.1-3.3 рорхнего уровней.
1Ч
элементы ЗАДЕРЖКА 4,1-4.3 и 5.1-5.3, элементы ИЛИ-НЕ 6 .1-6,3 и 7.1-7 .3 и снабжено для каждой емкости каналом, формирующим команды управления плужком, через который выход элемента ИЛИ 8.1-8.3 соединен с исполнительным механизмом 9.1-9.3 плужка, при этом каждьм канал включает в себя элементы НЕ 10.1-10.3, ИЛИ 11.1 - 11.3, И 12.1-12.3, 13.1-13.3, 14.1 14.2,13.1, ЗАДЕРЖКА 16.1-16.3, 17.1-17.3 и НЕРАВНОЗНАЧНОСТЬ 18.1 18.3,19.1-19.3, датчики положения плужка Опущен 20.1-20.3. Входом этого канала служат объединенные входы его первьк элементов НЕ 10.1 - 10.3, НЕРАВНОЗНАЧНОСТЬ 18.1-18.3 и элемента ИЛИ 11.1-11.3, а выходами - выходы первого элемента НЕ 10.1 - 10.3, с остальными входами которого соединены выходы элементов И 12.1 - 12.3, 13.1-13.3, 14.1-14.2, 15,1, выход первого элемента НЕ 10.1-10.3 соединен с вторым входом исполнительного механизма 9.1-9.3 плужка и jC .первым входом второго элемента НЕРАВНОЗНАЧНОСТЬ 19.1-19.3, причем к вторым входам первого 18.1-18.3 и второго 19.1-19.3 элементов НЕРАВНОЗНАЧНОСТЬ соответственно подютю- чёны датчики положения плужка Опущен 20.1-20.3 и Поднят 21.1-21.3 ) и элементы НЕ 22.1-22.3, а выходы первого и второго элементов НЕРАВНОЗНАЧНОСТЬ соответственно подключены к входам первого и второго элементов ЗДЦЕРЖКА и общим для всех емкостей каналом, формирующим команду управления приводом загрузочного устройства, включающим элементы И 23 - 28 и ИЛИ 29, причем к входам элементов ИЛИ 29, за исключением последнего, подключены выходы элементов
И 23-28 этого же канала, при этом в первом канале выход первого элемента ЗАДЕРЖКА 16.1-16.3 подключен к первым объединенным входам первых элементов И общего, второго и третьего каналов, а второго элемента ЗАДЕРЖКА - к последнему входу элемента ИЛИ 29 общего канала, во втором канале выход первого элемента ЗАДЕРЖКА подключен к первым объединенным входам второго элемента И 24 общего канала и первого 12.f и второго 13.3 элементов И соответствующего первого и третьего каналов, а второго элемента ЗЛДЕР| КА - к пер
5
0
5
вым объединенным входам третьего элемента И 25 общего и второго элемента И 13.1 первого канала, в тре- . тьем канале выход первого элемента ЗАДЕРЖКА подключен к первым объеди- неннЬ1м входам четвертого элемента И 26 общего канала и третьего 14.1 и второго 13.2 элементов И соответственно первого и второго каналов, а второго элемента ЗАДЕРЖКА - к первым объединенным входам пятого элемента И 27 общего канала и четвертого 15.1 и третьего 14.2 элементов И соответствующего первого и второго каналов.
.Датчики 2.1-2.3 рабочего уровня каждого канала подключены соответственно через вторые элементы НЕ 22.1-22.3 к вторым объединенньш входам элементов И 12.1-12.3, 13.1 - 13.3, 14.1-14.2 и 15.1 первых каналов, датчик 2.1 первого канала подключен к вторым входам второго 24, третьего 25, четвертого .26 и пятого 27 и первому входу шестого 28 элементов И общего канала и к третьим входам вторых элементов И 1.3.2-13.3 второго и третьего каналов, датчик второго канала подключен к вторым входам первого 23 -и щестого 28 и к третьим входам четвертого 26 и пятого 27 элементов И общего канала и к третьим входам четвертого элемента И 15.1 первого и элемента
5 и 12.3 третьего каналов, а датчик , третьего канала подключен к третьим входам первого 23, второго 24 и шестого 28 элементов И общего канала.
Устройство работает следующим образом.
При пустых емкостях 1-3 на входы элементов ШШ-НЕ 6.1-6.3, 7.1-7.3, отдатчиков 1.1-1.3, 2.1-2.3, 3.1 - 3.3 уровней и выключателей 9.1-9.3 загрузки поступают нулевые сигналы. Однако единичньй сигнал появляется на выходе только одного из элементов ИЛИ-НЕ 7.1-7.3, например на вы- ходе элемента 7.1, обладающего боль0 щим быстродействием по сравнению с элементами ИЛИ-НЕ 7.2, 7.3.-Единичный сигнал с выхода элемента ИЛИ-НЕ 7.1 поступает через элементы ИЛИ 8.1, 11.1 на исполнительный механизм
5 9.1, которьй переводит последний в положение Загрузка.
Поскольку выход элемента ИЛИ-НЕ f 7,1 соединен с входами элементов ШШ-HEj
0
0
5
6.1-6.3, 7.2, 7.3, то на выходах последних имеет место нулевой сигнал и, следовательно, исполнительные {механизмы 9.2, 9.3 плужков находятся в положении Незагрузка. Происходит загрузка емкости 1. При заполнении ее до нижнего уровня единичный сигнал с датчика 1.1 поступает на соответствующий вход элемента ИЛИ-НЕ 7.1 с определенной вьщежкой времени, создаваемой элементом ЗАДЕРЖКА 4.1. Таким образом, емкость 1 заполняется несколько выше датчика 1.1 нижнего уровня, что исключает частые переключения загрузки на пре- дьщущие емкости при отборе матери-, ала из них. На выходе элемента ИЛИ-НЕ 7.1 появляется нулевой сигнал, исполнительный механизм 9.1 плужка переводит последний в положение Незагрузка.
Одновременно с элементов ИЛИ-НЕ 6.1-6.3, 7.2, 7.3 снимается запрещающий сигнал, далее срабатывает следующий по быстродействию элемент ИЛИ-НЕ, например 7.2. Происходит загрузка до нижнего уровня емкости 2. Аналогично заполняется и емкость 3. При заполнении трех емкостей до нижних уровней запрещающие единичн1,:е сигналы с элементов ШШ-НЕ 7.1-7.3 на элементы ИЛИ-НЕ 6,1-6.3 снимаются и начинается загрузка емкостей до рабочих уровней, которая происходит аналогично загрузке до нижних уровней. При появлении нижнего уровня в какой-либо емкости загрузка до рабочих уровней прекращается и начинается заполнение емкости с появившимся нижним уровнем. В случае аварийного переполнения какой-либо из емкостей, например 1, на выходе дат- чика 3.1 верхнего уровня появляется единичный сигнал, который через элементы ИЛИ-НЕ 6.1, 7.1, ИЛИ 8.1, НЕ 10.1 поступает на второй вход исполнительного механизма 9.1 плужка, ко- торьй переводит последний в положение Незагрузка без выдержки времени .
При появлении неисправностей, препятствующих переводу первого по ходу загрузки исполнительного механизма 9.1 плужка в положение Неза-- грузка, на выходе элемента НЕРАВНОЗНАЧНОСТЬ 19.1 появляется единичный сигнал, который с выдержкой времени, определяемой элементом ЗАДЕРЖКА 17.1
495250 . 6
поступает на соответствующий вход элемента ИЛИ 29, с выхода которого подается команда на отключение загрузочного конвейера, о
При появлении неисправностей,
препятствующих переводу следующего по ходу загрузки исполнительного механизма 9.2 плужка в положение Не10 загрузка, на выходе элемента НЕРАВНОЗНАЧНОСТЬ 19.2 появляется единичный сигнал, который с выдержкой времени, определяемой элементом ЗАДЕРЖКА 17.2, поступает на соответствую15 щне входы элементов И 13.1 и 25. При отсутствии рабочего уровня в емкости 1 с выхода элемента НЕ 22.1 на соответствующий вход элемента И 13.1 поступает единичный сигнал и
20 через элемент ИЛИ 11.1 поступает на исполнительньй механизм 9.1 плужка, который переводит последний в положение Загрузка. При наличии рабочего уровня в емкости 1 с датчика
25 2.1 на соответствующий вход элемента И 25 поступает единичный сигнал и через элемент ИЛИ 29 подает команду на отключение загрузочного конвейера.
30 При появлении неисправностей, препятствующих переводу последнего по ходу загрузки исполнительного механизма 9.3 плужка в положение Незагрузка, на выходе элемента НЕРАВНОЗНАЧНОСТЬ 19.3 появляется единичный сигнал, который с вьщерж- кой времени, определяемой элементом ЗАДЕРЖКА 17.3, поступает на соответствующие входы элементов И 15.1, 14.2 и 27. При отсутствии рабочего уровня в емкости 2 с выхода элемента НЕ 22,1 на соответствующий вход элемента И 14.2 подается единичный сигнал, которьгй через элемент ИЛИ 11.2 переводит исполнн35
40
50
55
тельный механизм 9.2 плужка в поло- жение Загрузка. При наличии ра- бочего уровня в емкости 2 и отсутствии рабочего уровня в емкости t аналогичным образом переводится в положение Загрузка плужок исполнительного механизма 9.1. При наличии рабочих уровней в емкостях 1 и 2 на все входы элемента И 27 поступают единичные сигналы, а через элемент ИЛИ 29 подается команда на отключение загрузочного конвейера. При появлении неисправностей, препятствующих переноду первого по
ходу загрузки исполнительного механизма 9.1 плужка в положение Загрузка, на выходе элемента НЕРАВНОЗНАЧНОСТЬ 18.1 появляется единичный сигнал, который с вьщержкой времени, определяемой элементом ЗАДЕРЖК 16.1, поступает на соответствующие входы элементов И 12.2, 12.3 и 23. При отсутствии рабочего уровня в емкости 2 с выхода элемента НЕ 22.2 на соответствующий вход элемента И
12.2подается единичный сигнал и через элемент ИЛИ 11.2 поступает на исполнительный механизм 9.2 плужка, который переводит последний в положение Загрузка. При наличии рабочего уровня в емкости 2 и отсутствии рабочего уровня в емкости 3 на все входы элемента И 12.3 поступают еди- дачные сигналы и через элемент ИЛИ
11.3поступают на исполнительный механизм 9.3 плужка,- который переводит 11оследний в положение Загрузка.
|1ри наличии рабочих уровней в ёмко- стях 2 и 3 на все. входы элемента И 23 поступают единичные сигналы, а через элемент ИЛИ 29 подается команда на отключение загрузочного конвейера. . При появлении неисправностей, препятствующих переводу следующего по ходу загрузки исполнительного ме- ханизма 9.2 плужка в положение Загрузка, на выходе элемента НЕРАВНОЗНАЧНОСТЬ 18.2 появляется единич- ный сигнал, который с вьщержкой времени, определяемой элементом ЗАДЕРЖК 16.2 поступает на соответствующее входы элементов И 12.1, 13.3 и 24. При отсутствии рабочего уровня в ем кости 1 с выхода элемента НЕ 22,1 на соответствующий вход элемента И 12.1 подается еди шчный сигнал и через элемент ИЛИ 1 Г. 1 поступает на исполнительный механизм 9.1 плужка, который переводит последний в положение Заг-рузка. При наличии рабочего уровня в емкости 1 и отсутствии рабочего уровня в емкости .3 аналогичным образом переводится в положе- ние Загрузка исполнительньй меха- низм 9.3 плужка. При наличии рабочих уровней в емкостях 1 и 3 на все входы элемента И 28 поступают единичные сигналы, а через элемент ИЛИ 29 подается команда на отключение загрузочного конвейера.
При пояг лВНИИ неисправностей,препятствующих переводу последнего по
0 0 5
0
ходу загрузки исполнительного механизма 9.3 плужка в положение Загрузка, на выходе элемента НЕРАВНО- ЗНАЧНОСТЬ 18.-3 появляется единичный сигнал, который с вьщержкой времени, определяемой элементом ЗАДЕРЖКА 16.3, поступает на соответствующие входы элементов И 14.1,13.2 и 26. При отсутствии рабочего уровня в емкости 1 с выхода элемента НЕ 22.1 на соответствующий вход элемента И 14.1 подается единичный сигнал и через элемент ИЛИ 11.1 поступает на исполнительный механизм 9.1 плужка, кото- рьй переводит последний в положение Загрузка.I При наличии рабочего уровня в емкости 1 и отсутствии рабо- чего уровня в емкости 2 аналогичным образом переводится в положение Загрузка исполнительный механизм 25.2 плужка. При наличии рабочих уровней в емкостях 1 и 2 на все входы.элемента И 26 поступают единичные сигналы, через элемент ИЛИ29 подается команда на отключение загрузочного конвейера.
При появлении рабочих уровней во всех емкостях 1-3 на все входы элемента И 28 поступают единичные сигналы,, через элемент ИЛИ 29 также подается команда на отключение загрузочного конвейера. .
Формула изобретения
Устройство для автоматического управления загрузной емкостей сы-1
пучим материалом по авт. св. № 1066924, ; отличающееся тем, что, . с целью повьпиения надежности и удобства эксплуатации при работе загрузочного устройства с плужками, оно снабжено для каждой емкости каналом, формирующим команды управления плужком, через который выход элемента ИЛИ соединен с исполнительным механизмом плужка, при этом каждый канал включает в себя элементы НЕ, ИЛИ, И, ЗАДЕРЖКА, НЕРАВНОЗНАЧНОСТЬ и датчики положения плужка Опущен и Поднят, входом этого канала служат объединенные входы его первых элементов НЕ и НЕРАВНОЗНАЧНОСТЬ и элемента ИЛИ, а выходами - выходы первого элемента НЕ и элемента ИЛИ, с остальными входами которого соединены выходы элементов И, выход первого элемента НЕ соединен с вторым
входом исполнительного механизма плужка и с первым входом второго элемента НЕРАВНОЗНАЧНОСТЬ, причем к вторым входам первого и второго элементов НЕРАВНОЗНАЧНОСТЬ соответственно подключены датчики положения плужка Опуще.н и Поднят, а выходы первого и второго элементов НЕРАВНОЗНАЧНОСТЬ соответственно подключены к входам первого и второго элементов ЗАДЕРЖКА, и общим для всех емкостей каналом, формирующим коман- ДУ управления приводом загрузочного устройства, подающего сыпучий материал, включающим элементы И и ИЛИ, причем к входам элементов ИЛИ, за исключением .последнего,подключены выходы элементов И этого же канала, при этом в первом канале вькод первого элемента ЗАДЕРЖКА подключен к первым объединенным входам первых элементов И общего, второго и третьего каналов, а второго элемента ЗАДЕРЖКА - к последнему входу элемента ИЛИ общего канал, во втором канале выход первого элемента ЗАДЕРЖКА подключен к первым объединенным ёхо- дам второго элемента И общего канала и первого и второго элементов И соответствующего первого и третьего каналов, а второго элемента ЗАДЕРЖКА ,- к первым объединенным входам третьего элемента И общего канала и
второго элемента И первого канала, в третьем канале выход первого элемента ЗАДЕРЖКА подключен к первым объединенным входам четвертого элемента И общего канала и третьего и второго элементов И соответствующего первого и второго каналов, а второго элемента ЗАДЕРЖКА - к первым объQ единенным входам пятого элемента И общего канала и четвертого и третьего элементов И соответствующего первого и второго каналов, причем датчики рабочего уровня ка5 нала подключены соответственно че рез вторые элементы НЕ к вторым объединенным входам элементов И первых каналов, датчик первого канала подключен к вторым входам второго, треQ тьего, четвертого и пятого и к первому входу шестого элементов И общего канала и к третьим входам вторых элементов И второго и третьего каналов, датчик второго канала под5 ключен к в торым входам первого и ще- стого и к третьим входам четвертого и пятого элементов И общего канала и к третьим входам четвертого элемента И первого и элемента И третьеQ го каналов, а датчик третьего канала подключен к третьим входам первого, второго и шестого элементов И общего канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой бункеров | 1986 |
|
SU1516433A1 |
| Устройство для автоматического управления загрузкой емкостей сыпучим материалом | 1982 |
|
SU1066924A1 |
| Устройство для управления загрузкой бункеров сыпучим материалом | 1983 |
|
SU1114604A2 |
| Устройство обработки короткоимпульсных сверхширокополосных сигналов на приёмной стороне | 2019 |
|
RU2731369C1 |
| Устройство для управления загрузкой бункеров | 1978 |
|
SU765160A1 |
| Установка для обработки асбеста | 1978 |
|
SU734163A1 |
| Установка для гидрораспушки волокнистых материалов | 1974 |
|
SU557078A1 |
| Устройство для распределения заданий между ЭВМ | 1988 |
|
SU1575183A1 |
| Устройство для формирования фигур конического сечения на экране электронно-лучевой трубки | 1982 |
|
SU1101877A2 |
| Устройство для определения места замыкания на высоковольтных линиях автоблокировки железных дорог | 1985 |
|
SU1339461A1 |
Изобретение относится к автоматизации производственных процессов. Цель изобретения - повышение надежности и удобства эксплуатации. Устройство содержит емкости, исполнительные механизмы, элементы ИЛИ, НЕ, ЗАДЕРЖКА, ИЛИ-НЕ. В начале загрузки при пустых емкостях все исполнительные механизмы находятся в положении "Незагрузка". На выходе одного из элементов ИЛИ-НЕ, обладающего большим быстродействием, появляется единичный сигнал, который переводит исполнительный механизм соответствующей емкости в положение "Загрузка", и данная емкость загружается до уровня выше нижнего благодаря выдержке времени, создаваемой соответствующим элементом ЗАДЕРЖКА. Затем данный исполнительный механизм переводится в положение "Незагрузка" и срабатывает следующий по быстродействию элемент ИЛИ-НЕ и т.д., в результате чего все емкости заполняются до уровня выше нижнего. После этого начинается загрузка емкостей до рабочих уровней, которая происходит аналогично загрузке до нижних уровней. В случае аварийного переполнения какой-либо емкости соответствующий исполнительный механизм переводится в положение "Незагрузка" без выдержки времени. При появлении неисправностей, препятствующих переводу исполнительного механизма в требуемое положение, подается команда на загрузку других емкостей при помощи соответствующих исполнительных механизмов либо при отсутствии возможности загрузки последних подается команда на отключение загрузочного конвейера. 1 ил.
| Устройство для автоматического управления загрузкой емкостей сыпучим материалом | 1982 |
|
SU1066924A1 |
