;9 го
со со
ПОВЫШСИИ. 4(.-Кja счет автомап - жесткости параметИзобрск ние отн()си1ч-я к MaiuMii .jfipoc- НИК), а именно к средствам jaiiu;ri ; p.i.i- лпчных обьекюв ог вредно1 () имлсйст- иии вибрации.
Це.чь изобретения г и Bill )с г и виброзаши гы ческого регулировании ри ческой опоры.
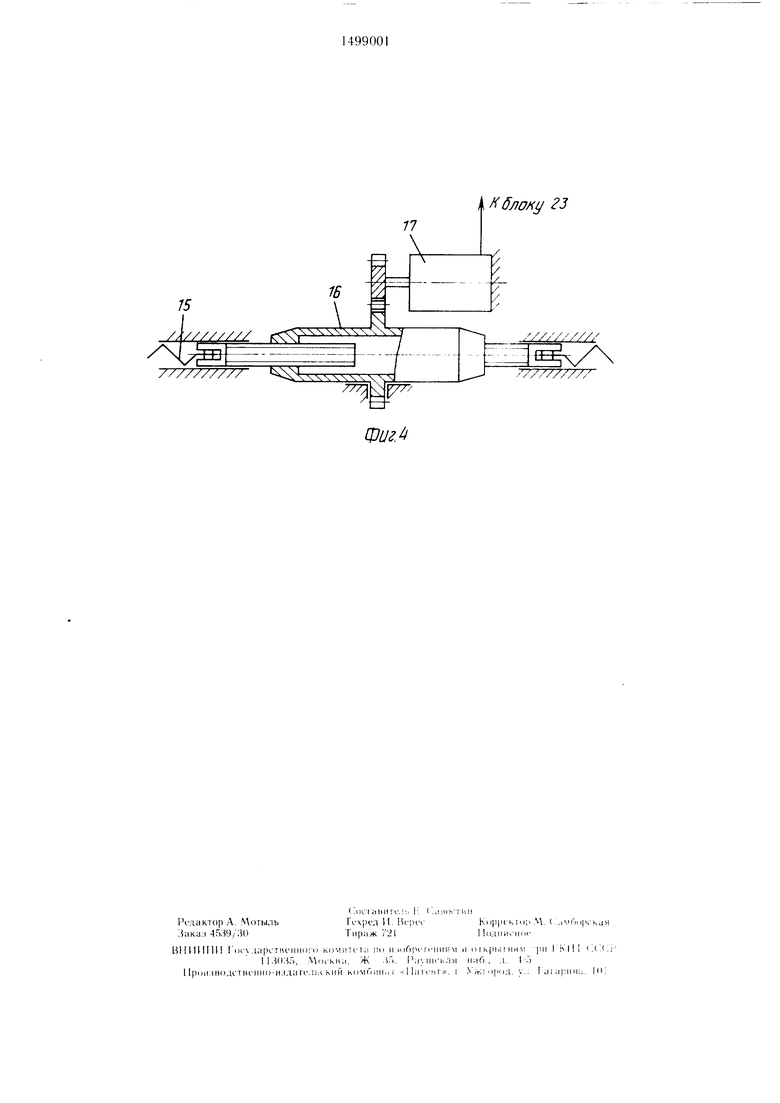
На фиг. 1 изображена нарамегрическая oiiojja, продольный разрез; на фи . 2 ю же, в момент воздействия на|рузки; на (})иг. . нарамет)ическая онора с системой у11)авлс- иия; на фиг. 4талреп с лекгр{)111)и
)Д()м параметрической опоры.
Параметрическая опора содержит кпрнус 1 с ус гаповленны.м в нем воронкооб|)аз- ным ()сн.)вание 1 2, имек)И1им повер.хност, к)иволипейпого профиля, |)ас11о;1ожепнии | па в()к нкообразпом основании 2 унругпи лс мент в виде плоской пружин1)1 3 и ига новленньи на пем опорпы11 элемепг, вып(..1 ненный в виде связываемого одним копппм с объектом 4 виброзапиггы сте|)жпя 5. име юпн го в средней части о( раничпKMI, li хода, lla внутренней новерхносги корпуса и1)П1о.1пепы О1 раничп 1 ели хода в виде Г,1(.л нов 7 для п. юской пружипы ..
()по|)а содержит гакже узел зап1емлення. выполпенноН в виде но.чвескп hi, HiajMiiipiio соедниепных с пей чяг 9, па коппах ко горых шарпирпо закрепле1П 1 ку,11ачкп К) крп волипейпои) п)о4)пля, и н})ужип II и 12, свя- зывак)1пих тяги 9 и кулачки К).
.eждy 01 раничитс, 1ем ( хода и подв1Ч - Koii 8 уставов, lena доно,11П1те,тьная 13, а на дру|ч)м копне стержня П ус ганов,тен сфс рическп лемен 14.
Для автоматического регулирования кости ii.iocKoii нружипы в oin.ipe устапав,1п- наются между тягами 9 и связа1пП) с ними посредством BCHOMOI ательн1Лх пружин 15 талреп 16 с ,текгр()нриводом 17, у.сж- ду основанием корпуса 1 и нлоско11 пружиной 3подпру жипепный cu;ieH(jH.i IS На обьеюе 4 виб|1оз;ипиты ус ranaikiHBaHii- си соединеппые между c()6oii да-1чпк 19 виб роскорости и датчик 2(J виброперечилпени
Управ,те1П1е автоматпч -ским pei4, inpO ia нием осуи1ест 4ляется с помопц.К) cuciewhi 21 управления, сосгояп1ей из ана 1изагор;1 22, Г1одк,11)ченного к датчикам 19 п 20 виброскорости п виброперемещенпй, б.ижа 23 настройки, соедипенпого входом г , icKrpo приводом 17, п б, 1ока 24 | )егу.1И|)ова11ия на пряжения, нодклк)ченн()1Ч) вхо.аами к co.ieno иду 18.
Для регулирования жесткости (кчоская пружипа 3 может бьпТ) выполнена г|)ех слойпой, причем нижний 25 и верхний 2(i з,11емент1)1 п,чоск()й нружпны 3 метал.шчес- кпе, а средний элемент 27 выно,тшч1 и;, унру|Ч)го материа.та. например нхиипл
1 la)ii Me: ри тгская о обр,г;:;л
ора p;it ) i lae v с,11елукь
5
I Ipn IU13 К ис iTiiin ii:ir;; , ;иб|К) wi lUH I i.i XD.I; i ne; i:,i 5 CO . р1 .ческим )Л.-:чС 1 гате ||,то(. кая п)ужпна 3
,чП ч а ьеК 4 e ;ci:i; иие стерж ; ,i 1 1. h релу. и.. 1еф11р Ч У .
;;сремеп1ая « |ягпо контакт. с вороикообраз- iibiM ocnoiianneM 2 к оси опоры. Фик(.:а- пия п. ж.ииь; 3 на вори.1копб)а.(НиМ Ol НОН. ГШЬ 2 ОС Hiec I . 1И1.Л С ,1 I il ,MOllUjK)
выс1Л пов 7. ()дпоЕ ременпо с IITIM (праня
ЧИ 1С.1Ь ( хода . -С-фг/рм Mfiyi T .Т011О. 1Г И Ч ТЬН VKi
П. 13 I-, iii )слич11 aei иидем.тени и . выпо.лнепныи в ви.те по;;вескн Н, 1Я1 9 и n ;i|iНЯрНС )акр1 1 Л ПН)1 ку. ul ....:«. ч.
I lepCMtMiiijii iR (,та за1пем. 11 Н1 я iipnBo;ii
20
25
30
35 22
40
45
50
1 . 1 1 а раме г J) и Л ; i корпус с craHoB. H4iiii,iM la пым in. iHiF itinncM, чриво. 1Пне11||; | 1 iipcij ii. ;я. | осповапии упр i нп э,и
П)уЖИПЫ и ус 1 ли iB. ntiiii лем1 :| I, свя ibin,,. :i6 j.eK IOM, ч .iH iiii u:ti i
Н вьппения чффек гивь чти лиоролашигы на ннут; ни(Ч (м;ти корпуса BbiriujiHCHb
С ГраиИЧИ Р.М}- XD.l l ИИЛ г, СТуПОВ для ИЛОС
K iH пружинь;, ;)iU) -jjieMeiiT р олнеи R ;П1де связ1 ша; н)гп одн1-: Kijui ov ; объ- ск;ом Binipojaiuii 1 ы г 1(,.,| я, имеющего в 1.-р1 Дией ч;1сти ограничитель хода, а опора снабжена члом защемления, выполненным в виде 1К)двески, шарнипно соединенных с ней тяг, на концах нарнирно за креплены кулачки криволинейного профиля, и пружин, связывающих тяги и ку. 1ачки, дополнительной п ужи||ий, уетлноЕ ле1и10Й между о|-раничителем хода и подвеской, и сферическим элементом, установленным на другом конце стержни
2. Опора по п. 1, отличающаяся тем, что она снабжена талрепом с электроприводом, установ. 1енными между тягами и связанными с ними посредством вспомога тельных пружин, подпружиненным по оси со,пеноидом, установленным между корпусом и плоской пружиной, устанавливаемыми на объекте виброзащиты и соединеннымл между собой датчиками виброскорости и виброперемещений и системой управления, состоящей из анализатора, подютюченного к датчикам виброскорости и вибгоперемещений, блока настройки, соединенного входом с электроприводом, и блока регулирования напряжения, подключенного входами к соленоиду.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический гаситель колебаний | 1986 |
|
SU1442749A1 |
| Активный виброизолятор | 1986 |
|
SU1328616A1 |
| Способ определения коэффициента поглощения энергии в объекте при колебаниях и устройство для его осуществления | 1986 |
|
SU1455250A1 |
| Вибростенд Больших А.С. | 1981 |
|
SU993076A2 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |
| СТЕНД ДЛЯ ДИАГНОСТИКИ ПО АНАЛОГУ ГИДРОСИСТЕМ МАШИН КОММУНАЛЬНОГО НАЗНАЧЕНИЯ | 2012 |
|
RU2509927C1 |
| Виброизолятор | 1985 |
|
SU1357619A1 |
| Трехкоординатный преобразователь виброперемещений | 1988 |
|
SU1589096A1 |
| ИЗМЕРИТЕЛЬ ПРОСТРАНСТВЕННЫХ ВИБРАЦИЙ | 2010 |
|
RU2454644C1 |
| Пневматическая виброзащитная опора | 1982 |
|
SU1145184A1 |
Изобретение относится к средствам защиты различных объектов от вредного воздействия вибрации. Целью изобретения является повышение эффективности виброзащиты за счет автоматического регулирования жесткости идаметрической опоры. Выполнение в параметрической опоре, содержащей корпус 1 с установленными в нем воронкообразным основанием 2 с криволинейной поверхностью его профиля, расположенный на нем упругий элемент в виде плоской пружины, которая может быть выполнена со слоями 25, 26, 27, и установленный на последней опорный элемент, узла защемления в виде подвески 8, шарнирно соединенных с ней тяг 9, на конце которых шарнирно закреплены кулачки 10, а также установка между тягами 9 талрепа 16 с электроприводом, между корпусом 1 и плоской пружиной подпружиненного соленоида 18, на объекте 4 виброзащиты датчика 19 виброскорости и датчика 20 виброперемещений и подключение к параметрической опоре системы 21 управления, состоящей из анализатора 22, блока 23 настройки и блока 24 регулирования напряжения, позволяет при воздействии нагрузки на объект виброзащиты автоматически регулировать жесткость параметрической опоры, что повышает эффективность виброзащиты и позволяет снизить уровень вибрации, передаваемой на фундамент на 10-20 дБ. 1 з.п. ф-лы, 4 ил.
ц ..
/Pt
6 г
-(It
-fO
fe.2
75
; I f б Л ОМ у 23
Фиг.
| Виброизолятор | 1982 |
|
SU1078155A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для защиты троллейных от обрыва | 1940 |
|
SU59676A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
