Изобретение относится к виброзаплитным устройствам, а именно к управляемым виброизоляторам.
Цель изобретения -- обеспечение пространственной виброзащнтЕ) за счет увеличения числа степеней свободы защищаемого объекта.
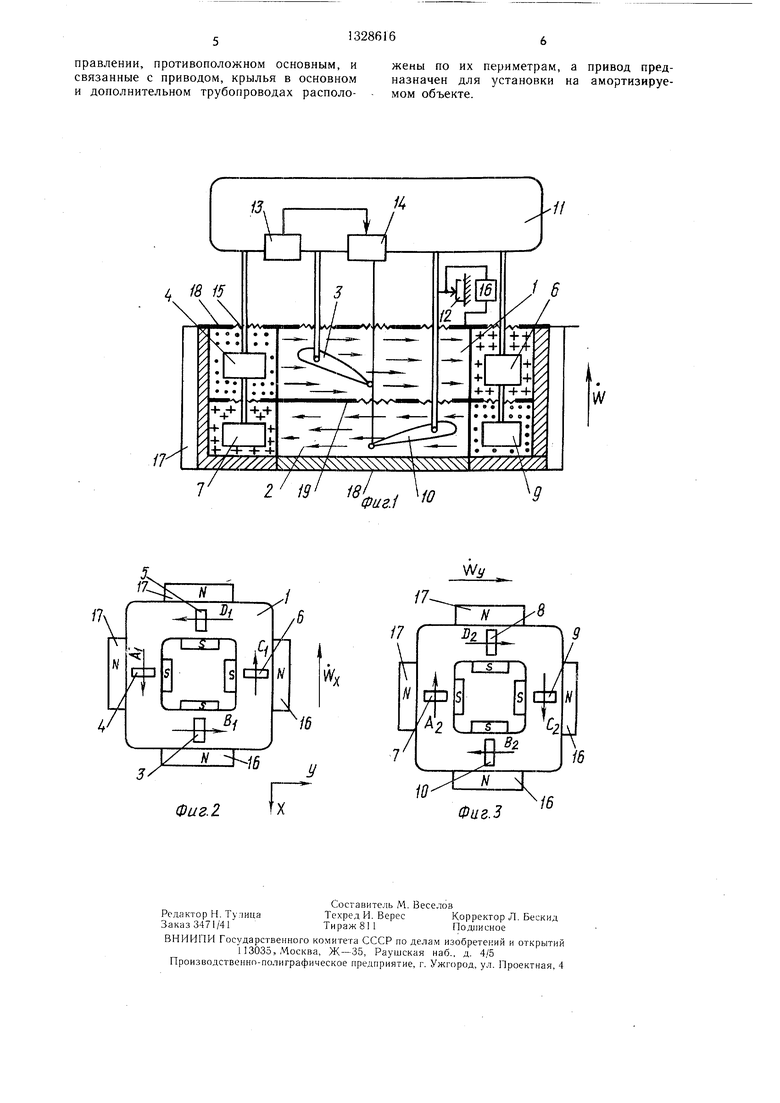
На фиг. 1 изображен вибpQизo;i lT(J), продольный разрез; на фиг. 2 -- с.хема размещения крыльев и направления течения среды в основном трубопроводе; на фиг. 3 - то же, в дополнительном трубопроводе.
Активный виброизолятор содержит замкнутые кольцевые трубопроводы i и 2, заполненные сплошной средой, например алюминиевой пудрой, крылья 3--10, riOMeiueHHbie внутрь трубопроводов 1 и 2 и iiiapiii:)iio соединенные с запиицаемым объектом 11, датчик 12 линейны.к неремегцении. роторная часть которого соединена с объектом П. а ста тор пая -- с основанием (не HOKaaailo). вибродатчик 13 и привод 14, ycTaiK B.;iei;iib;c на объекте 11 и электрически соедиксг - ные между собой. Привод 14 кинематически соединен с крыльями 3-- 10, Количест:«) крыльев в обои.х трубопроводах Г)динако15ое и выбирается, ис.ходя из требуемой грузо- нод ьемности и габаритов устройсгва. Кинематические связи крыльев 3-10 с сбье1 - том 11 и приводом 14 осу1н,ест}.:1як)тся через мембраны 5, об;1адаю1цне ма;1ок жесткостью (например, мембрш ы, ()товлем11ые из мягкой резины). Датчик 12 „чниейньмх нере.менк ний электрически подк/мочеи через регулятор 16 к liacocy. В обще,-,: сл-. -iae насос может быть .чюбого Tsnia, в KoiiKperiiOH с.че.ме (фиг. 1) нрименен маппггог ндродина- мичеекий коидук1ию1П1ый насос. KOTOpi iii ео- стоит из .магнитов 17, установ, :енны па кор- пуса.х трубопроводов 1 и 2 в ii,:K)cKOCT5ix и. продольных сечений. Параметр ;: систем регу- лиров ания «вибродатчик - -кры/ю н «.да гчи.-; 12 линейн121х неремещени) -- насос подбираются так, что постоянная lipCMeiui мторой систем) менее чем а 6o., че.м 1ервой.
Устройство работает следую Ц -п образом
5 )Й мо.ент к)Ь. 3- 0 ,
на дне ТрубоГ рОВОДОВ 1 2. и .|К
12 ли 1ейно1 о переме 1, м рабат з;:ет , ,иона.)Ный сме, ei i.i ритора от 1оситель о у. статора. Ну.ль сигг-;)- ра ycTaHOii. ie так, что , датчика 12 , кр,1Ь5; 3 10 находятся п се 1едине cooi () трубо 1роводо 1 И 2 1о г.1)соте. в iia - a. hw момент ,:i С да1чи а 12 мальн з1Й а ход ро )Г1а (. В регу, иторе 16 он |)С(:бразус1 ся к нуж- но.м и в де тока i ()стучаст
на 18 и 19. От ()К)Й l..j HjV-,
1оети (аг ример. 18) ток iJpoTe: ;ieT к 19 минусовой иоляр ости через (j.iiHioИ1.у1ОTpy6o p()BO. U) ЧГ ЮПП IV)CpC.lV
при 1риме ени гогидродина.мического насоса среда должна быть электропроводной, например алюминиевая пудра. Направление течения тока перпендикулярно направлению магнитных силовых линий в каждом грубопроводе 1 и 2.
В результате взаимодействия тока I с магнитным полем, имеюнхи.м напряженность Н, каждая частица среды подвергается
воздействию электрической силы ,(lXH где К - коэффициент пропорциональности, направленной вдоль нродольной оси трубопровода, и под ее воздействием движется вдоль трубопровода. Поскольку силы Fi действуют на каждую частицу, движется весь
запо,чняю|ций трубопровод поток. Причем фазовые соотно пения направления магнитных силовь х . И ТОКОВ В трубопрово- лах 1 и 2 так.ие, что иа равления движения потоков в ирот - вопо пожны. В результате взаим 1ого трения и трения о стенки
трубопроводов и 2 скорость частиц ус- тапа ливается 1осто5; 1 -:ой V, Поток в каждом трубопроводе 1 и 2 обтекает нахо- дя,1-1еся Б не.м кр1)лья 3-- 10 и н а каждом из них образуется )ан, в.верх подъ5 сила, которая од.мнаковых углах атаки кр.льев и оди1-1аковых их геометрических характер 1стиках будет:
.Р-.у
0 | де Су - оэ(|)( (.)Д )емной еилы; р - - 1,,()Сть обтекающей среды; S -- к). В каждой части трубо ровода крь.чья стречают юток сноим 1 еред МИ кромками.
Суммар 1ая ОД ) CM. ia F XFj,
j
де i - ко. шчсство крыл)ев в обоих трубо- роводах, силу Р веса объекта
11и Kp j:;beii 3-10, в резу.; ьтате объект 11 движется ввер.х. вместе с ним движется ротор датчика 12, )жаясь к 1улю датчика 12. это.м выходной сигна; датчика
12уме1 ьп ается, уме Ь ается ток 1 н связан t: 5 e с - Ji;v CKOflOCTI V 1ОТОКОВ i; 1ОДЪе.М
V. в ei-:o i4jpOM п с.):: о.ж с ь: .ч и кры.тьев 5 О и рото)а 12 u; высоте се- т)убо 1роьо;|,(.)в : 2 з и чения тока - скорости ycT, iiia i. ii i;uoTc;-.: такие, что ОД1)- емнаи г ., 5ает алравлен- HVto С11.у веса Р. (.)б ьект оказь вается i3Bcii e. 1-; 11ОТ(,)кс геку 1сч - о 1 I- 2 ,l(()il СрСД). Aiia. iOп Ч ая имеет место и в случае р11мене1 ия нлгосон друшх , Лобовыс сон|)1),.я K;))i. 3- iO (л:рсде,тк1огся
iblpa/KC iC.M
55
i V 2
Ввиду того, что в трубопроводах 1 и 2 направления потоков противоположны, про- тивоп.оложны и суммарные силы лобового сопротивления на крыльях 3-10, а нх сумма равна нулю, поэтому объект 11 не имеет ни линейных перемещений по осям X и Y, ни вращательных движений вокруг оси Z. Допустим, что основание совершает пространственную вибрацию с виброускорением
W х + Wy + Wz,
где Wx, Wy, Wz - компоненты виброускорений вдоль взаимно перпендикулярных осей X, Y, Z, связанных с невибрирующей базой. При наличии виброускорения Wz потоки среды в трубопроводах 1 и 2 получают направленные вдоль оси Z приращения скорости Wt которые, складываясь со скоростями V, вызывают скос потока и, как следствие, - изменение угла атаки крыльев на угол:
Да arc sin -.
В результате возникает приращение подъемной силы
ДР. ).
Рассмотрим наличие скоростей Wx и Wy вибрационных перемещений трубопроводов 1 и 2. Ввиду того, что скорости W«. и Wy на некоторых участках трубопроводов совпадают со скоростями V основного течения потоков, а на других им противоположны, подъемные силы на отдельных участках имеют следующие значения
FA, F, j,C,,/
FB, p. FB2 p.QSAV- / Fc, p.C. Fc, FD,
p. P°2 p-CyS i-,
где индексы 1 и 2 означают основной и дополнительный трубопроводы.
В результате подъемная сила получает прира1цение
(У; + Ш/).
Полное суммарное приращение подъе.м- ной силы составляет
AF 2nCvS(Wx + W-) + (Да).
Приращение подъемной силы ДР вызывает движение об ьекта с ускорением;
,, лР iLт
где m - масса об ьекта.
При -/гом вибродатчик 13 вырабатьпзает пропорциональный ускорению а сигнал, который поступает на привод 14. Последний меняет угол атаки крыльев 3-10, в результате меняется подъемная сила F и ускорение а. Включение привода и вибродатчика таковы, что при виброперемещении объекта 11 вверх угол атаки крыльев 3-1,0 уменьшается, и, следовательно, уменьшается подъемная сила, при перемещении вниз - увелиуивает- ся. При качественной работе системы регули.-V рования значение подъемной силы не изменяется, а остается равным весу объекта. При качественной работе системы автоматического регулирования угла атаки амплитуда вибрации объекта 11 в К (коэффициент усиления разомкнутой системы) раз меньше
5 амплитуды вибрации основания. Применение известных в автоматике методов придания системе астатизма по отнощению к конкретному входному воздействию позволяет свести вибрацию объекта к нулю. При этом из-за большой постоянной времени сис
0 темы «датчик 12-насос вибрационные колебания статора датчика 12 относительно его ротора не вызывают изменений скорости V.потоков.
Наличие виброскоростей среды Wx и Wy
5 приводит в каждом канале к приращению силы лобового сопротивления на величину
ДQi.2 CяSpn(w +w;).
Учитывая, что направления потоков в трубопроводах 1 и 2 противоположны, про- 0 тивоположны и знаки приращений силы лобового сопротивления, а их сумма равна нулю, поэтому объект по-прежнему не имеет вращательных движений вокруг оси Z. Силы, действующие на защищаемый объект 11 со стороны вибрирующего осно- 5 вания, определяются выражением
F,, С-А, где С - жесткость мембраны;
А - амплитуда виброускорения. Использование в виброизоляторе мягких мембран, жесткость которых близка к нулю, 0 устраняет воздействие вибрирующего основания на защищаемый объект.
Формула изобретения
Активный виброизолятор, содержащий замкнутый кольцевой трубопровод, заполненный рабочей средой и имеющий насос, размещенные внутри трубопровода крылья, связываемые с амортизируемым объектом, вибродатчик, датчик линейных перемещений и
0 привод, связанный с крыльями, отличающийся тем, что, с целью обеспечения пространственной виброзащиты, он снабжен дополнительным замкнутым кольцевым трубопроводом, установленным параллельно основному, также заполненным рабочей сре дои и имеющим насос, и размещенными внутри допо.мнительиого трубопровода кры- .чьими, также связываемыми с амортизируемым объектом, расноложенными в направлении, противоположном основным, и жены по их периметрам, а привод пред- связанные с приводом, крылья в основном назначен для установки на амортизируе- и дополнительном трубопроводах располо- мои объекте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активный виброизолятор | 1981 |
|
SU1094995A1 |
| Активный виброизолятор | 1986 |
|
SU1381283A2 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ВОЗДУШНОЙ СПУТНОЙ СТРУИ ЗА ТРАНСПОРТНЫМ СРЕДСТВОМ | 1993 |
|
RU2088487C1 |
| Способ коррекции гировертикали по углу атаки | 2022 |
|
RU2790548C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Активный виброизолятор | 1978 |
|
SU691627A1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
)
Т .
7
2 19
18
Фаг.1
40
T .
18
Фаг.1
40
| Авторское свидетельство СССР свободы защищаемого объекта | |||
| Активный виброизолятор | 1981 |
|
SU1094995A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| виброизолятора дополнительным трубопроводом, насосом и размещенными внутри дополнительного трубопровода крыльями, которые связаны с объектом, обеспечивает пространственную виброзащиту этого объекта | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
